本ドキュメントについて
本ドキュメントは、「MIRS1502のエレクトロニクス」関連の「詳細設計書」をまとめたものである。主な変更点
MIRS1502における、エレキでの主な変更点を「Table1」にまとめる。| 変更部品名 | 変更内容 | 変更目的 | ドキュメントリンク | メイン責任者 | サブ責任者 |
|---|---|---|---|---|---|
| 電源ボード | 改良(コンデンサを基板内に取り付ける) | 不安定な接続からなる「突然の電源落ち」を防止 | 電源ボード設計 | 大川 | 北原 |
| 赤外線センサ | 新規導入(8台購入) | 怪盗機が持つ「赤外線ボール」の検知 | 赤外線センサ概要 | 大川 | |
| 超音波センサ | 新規導入(4台購入) | 前後左右斜めの八方向の障害物(「壁」と「美術品」)の検知 | 超音波センサ | 大川 | |
| モータ | 増設(既存のものと同じモータを2台取り付ける) | 「4枚」ある「オムニホイール」の最大限の有効活用 | 無し | 北原 | |
| FPGAボード | 改造(内部回路の書き換え) | パーツ増設に伴う、「ピン数」の調節 | FPGA回路概要 | 北原 | 大川 |
| モータ制御ボード | 改良・増設(ボードのサイズの小型化・2枚増設) |
モータを「2台」増設するため、新規作成する。 また、機体の小型化(コンセプト:MINIRS)に伴う、基板そのものの小型化 |
モータ制御ボード概要 | 大川 | 北原 |
| ドータボード | 改良(作り直し) |
モータ用ポートの増設(FPGAボードの改造)との対応 「『1枚のモータボード』と『1台のモータ』」関係を撤廃(機体の小型化が理由)する。代わりに、関係性を「『1枚のモータボード』と『4台のモータ』」に変更 |
ドータボード概要 | 北原 | 大川 |
| Arduinoシールド | 新規導入(作成) | 「各種センサ」からの情報を「Arduino」に送る | こちらを参照 | 飯田 | 大川 |
| Arduino Mega | 新規導入(購入) | 「赤外線」及び「超音波」等のセンサからの「信号処理」の円滑化 | Arduino Mega概要 | 大川 | 飯田 |
| 方位センサ | 新規導入(既存の物を使用) | ロボットの向きの確認 | 無し | 大川 |
新規作成物の設計
3.1,電源ボード
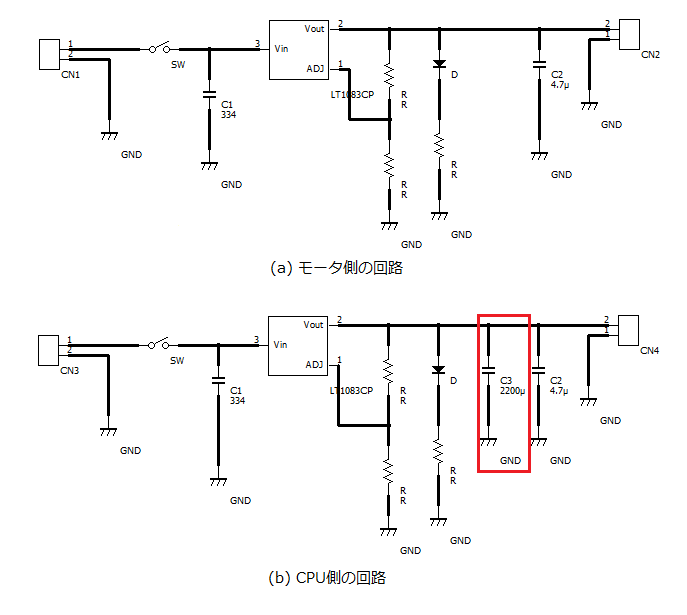
目的:「バイパスコンデンサ」を出力に並列につなぐ事により「出力電流の急増」に耐えうる「バッファ」を設け、「システムの安定化」を図る。
回路図:以下のFigure1に示す。
この図の中で、「C3,2200μ」となっているコンデンサが、今回新たに追加する「バイパスコンデンサ」である。
3.2,赤外線センサ
目的:「怪盗機」に取り付けられた「赤外線ボール」からの「赤外線」を受信する。
今回は製作期間や性能から、市販品のセンサを使用することにする。
下記に使用部品のサイトのリンクを記載する。
使用部品:フォトトランジスタ5mm丸型(赤外線)L-51ROPT1D1
3.3,超音波センサ
目的:「壁」や「障害物」の有無、そこまでの「距離」を検出する。
今回は性能面から、より詳細な値を読み取れる市販品のセンサを使用することにする。
下記に使用部品のサイトのリンクを記載する。
使用部品:超音波距離センサ HC-SR04
3.4,FPGAボード
目的:回路を改良し、増設した「モータ」に信号を送る。
回路図:以下のFigure2に示す。
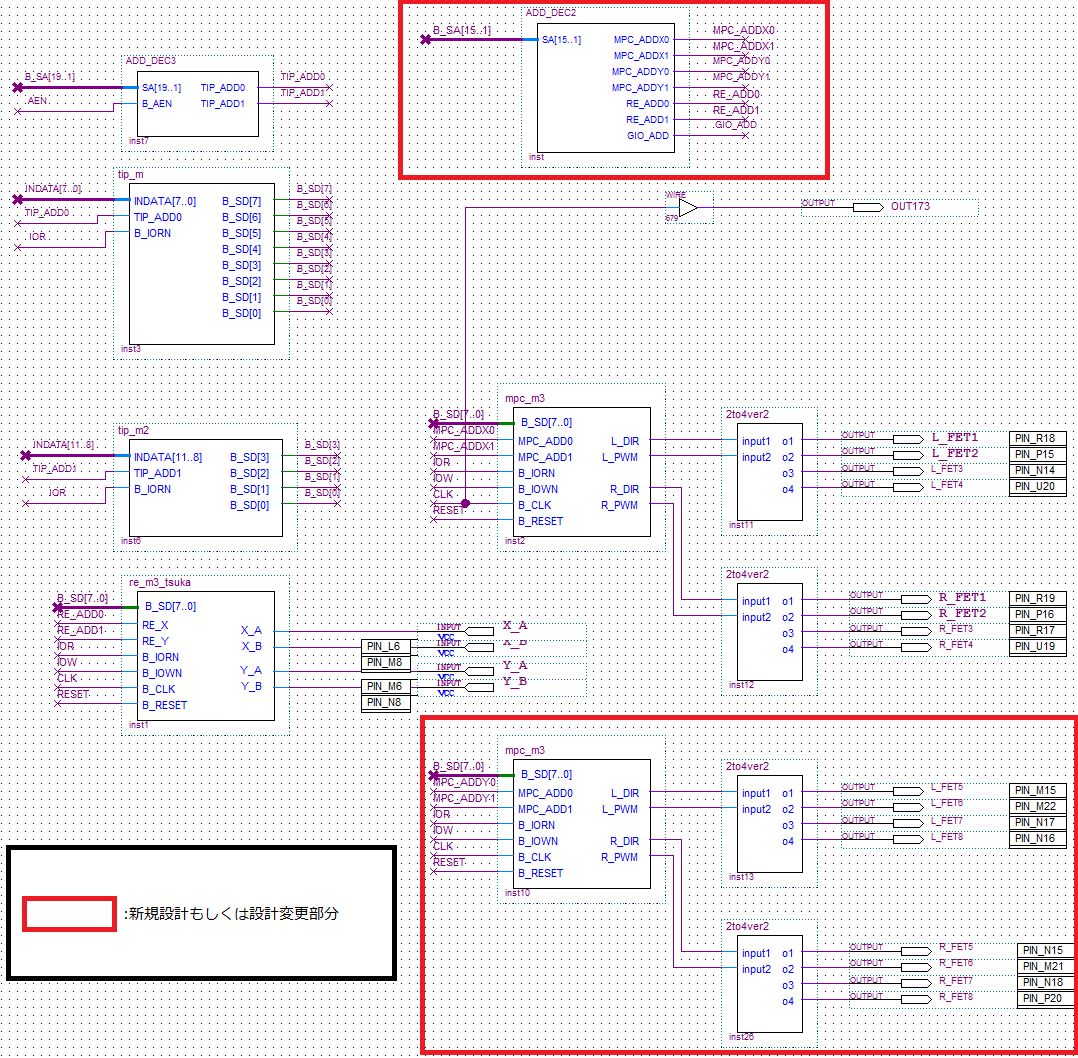
変更点:CPUボードからの信号をモータに出力するポート、またそれを制御する回路を増設する。
それにあわせて、デバイスIDを追加し、CPUから新しく追加した回路を制御できるようVHDLを書き換えた。
3.5,モータ制御ボード
目的:基板を設計しなおし、基板を「小型化」して機体サイズを削減する。この改造の目的はあくまで小型化であり、「回路構成」そのものは、バイパスコンデンサを搭載した以外は「既存のモータ制御ボード」と同一である。
バイパスコンデンサを搭載した理由は「電源ボード」と同じである。
回路図:以下のFigure3およびPDFデータに示す。
パターン図:以下のFigure4に示す。
回路データ(Kicad):MCB.zip
MCB.pdf
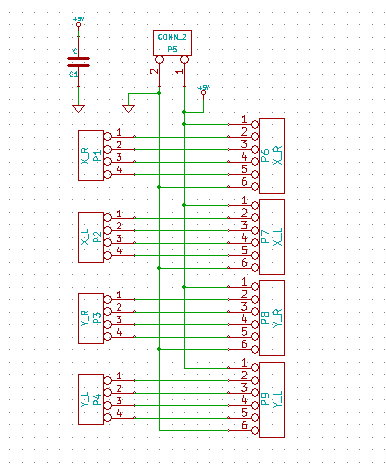
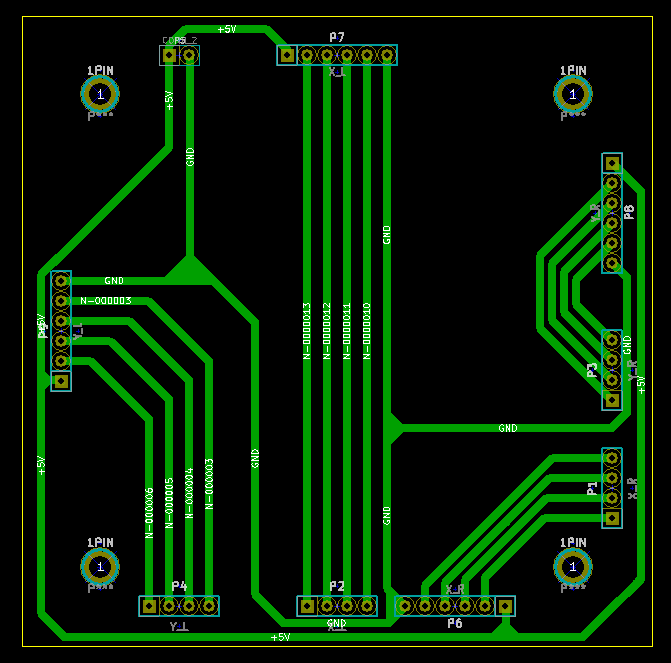
3.6,ドータボード
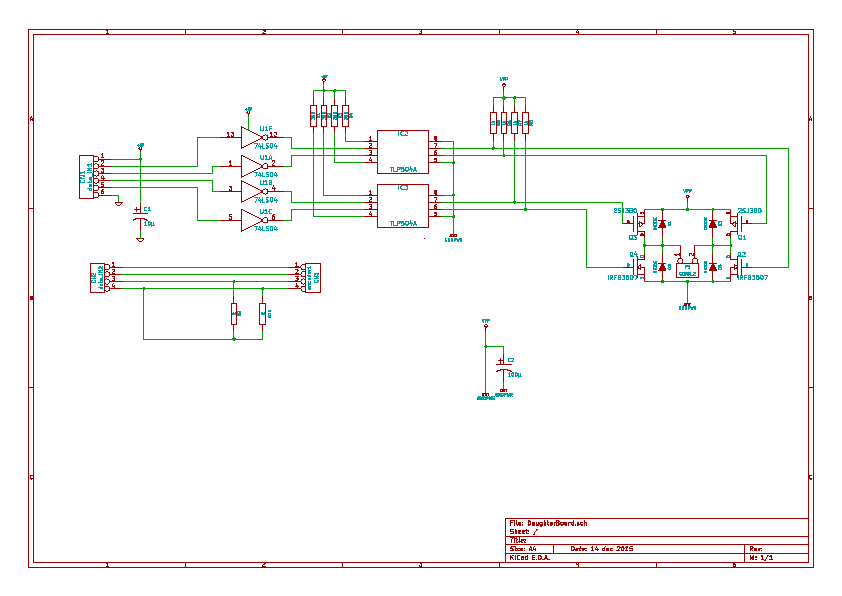
目的:新規のシステムに対応した回路を新規に設計する。
回路データ(Kicad):DaughterBoard.zip
回路図:以下のFigure5に示す。
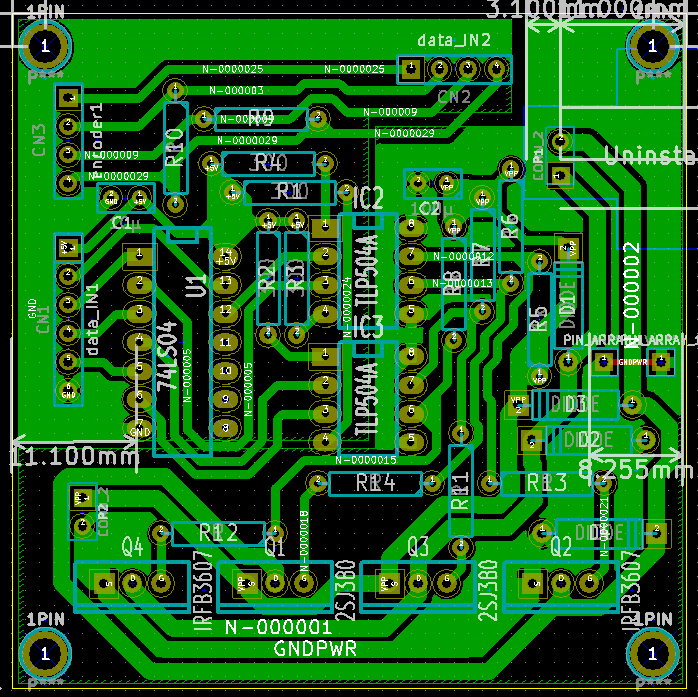
パターン図:以下のFigure6に示す。
 "
"3.7,Arduino Mega
目的:本機体では「全方位を常に監視し、怪盗機を発見する」を目的として、「超音波センサ」と「赤外線センサ」をそれぞれ8個搭載する。
「CPUボードのみ」にそのままこの「16個」のセンサのデータ処理を上乗せで任せてしまうと、CPUに対して多数の処理を強制させることとなり、「全方位監視に伴うセンサ処理」と「それ以外のすべての処理」の同時進行処理が期待できない。
そこで、「Arduino Mega」を本機体に搭載し、この「Arduino Mega」にセンサの処理を肩代わりさせることで、CPUの処理を減らすことで「全方位監視に伴うセンサ処理」と「それ以外のすべての処理」を確実なものにする。
このArduinoの処理については、以下の2つのリンクを参照のこと。
Arduino.org 公式サイト
Arduino.cc 公式サイト
開発スケジュール
「MIRS1502 システム基本設計書」の「6.開発スケジュール」を参照。機能チェック
各種基板を作成・及び新規購入を済ませた後、それらの基板が正常に動作するかを試験する必要がある。
導通チェックについて
はんだ付けする前の「素子の足」が入る「穴」と「導線」の間の導通、「Vcc-GND」間の絶縁をテスターで確認する。
また、「電源供給用のコネクタのGND端子」と「他の全てのGND端子」の間の導通も確認する。
抵抗値が「20Ω」以下であれば導通、「10kΩ」以上であれば絶縁と判定する。
「断線」や「ショート」を確認した場合は、修正する。上記の方法で修正不可能な場合は基板を作成しなおす。
「導通チェック」が終わった後は「機能試験」を実施する。
この試験は、ソフトのプログラム試験と同時に実行する。
なので、これの段取りについては、MIRS1502 ソフトウェア詳細設計書の「5.テスト項目」を参照。