はじめに
本ドキュメントは標準部品試験の結果を記載したものである。
試験部品
試験対象の部品は以下のとおりである。
| 種類 | 対象 | チェック項目 | 担当者 | 備考 |
|---|---|---|---|---|
| ボード | 電源ボード |
|
土屋・萩原 | |
| ドータボード |
|
海老名・高村 | ||
| モーター制御ボード |
|
石井・早川 | ||
| 超音波センサボード(親機・子機) |
|
太田・加藤 | ||
| ケーブル |
CPUボード電源ケーブル バッテリ接続ケーブル ドータボード電源ケーブル 電源ボード・モータ制御ボード接続ケーブル |
|
土屋・萩原 |
試験結果
試験結果を以下に示す。
電源ボード
試験内容
試験内容は標準部品試験計画書 4.1.電源ボードを参照する。試験結果
部品配置確認
電源ボードの部品を仕様書と比較し、目視で確認した。
以下に試験で使用した仕様書を示す。
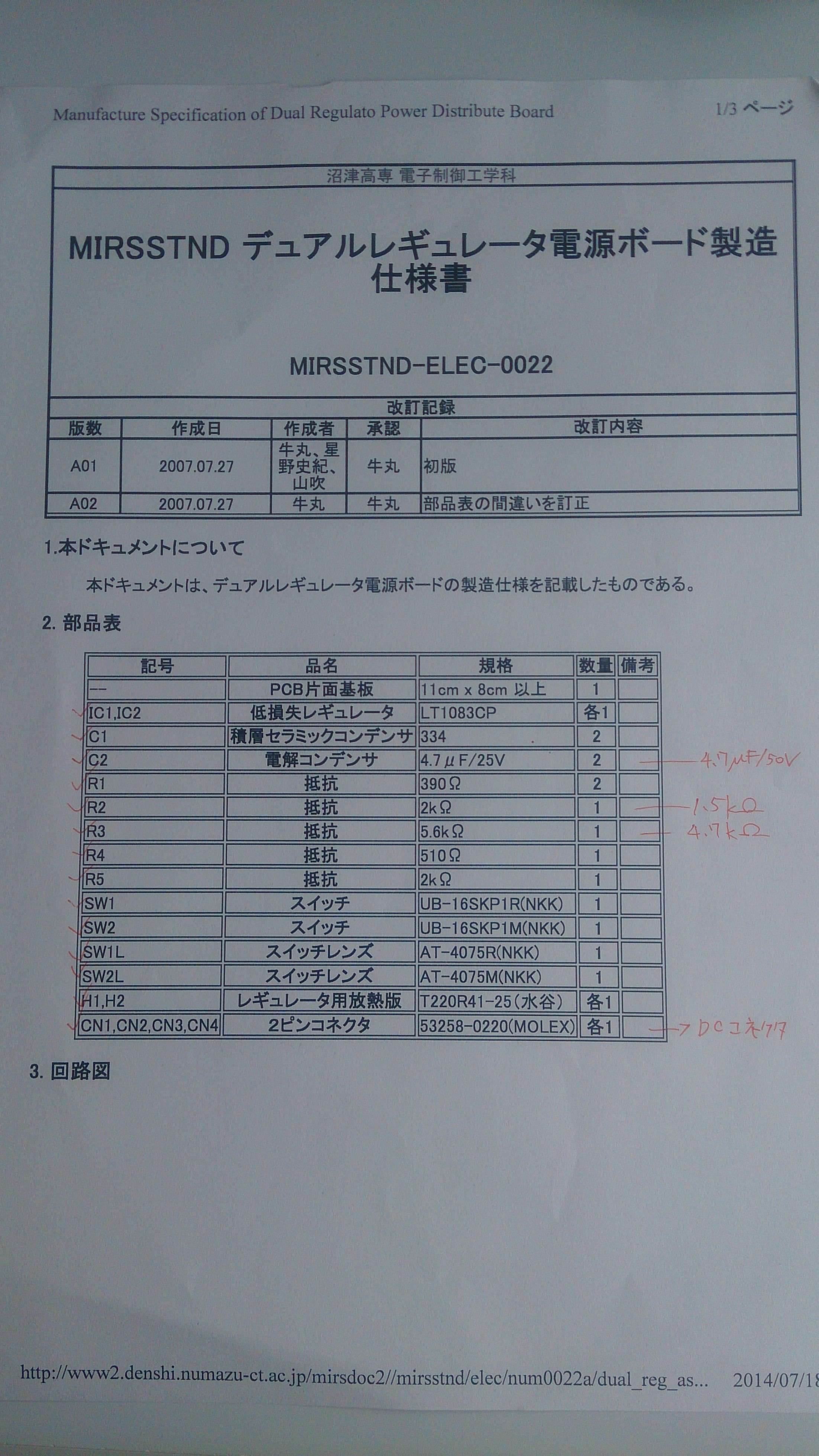
Fig.1 電源ボードの仕様書
しかし、制御系の回路の抵抗は部品表と異なるものであった。
これは、CPUが安定して動かす為であるので変更はしなかった。
導通試験
テスターを用いて回路の状態を確認した。確認した所は仕様書の回路図にチェックした。 チェックで使用した回路図を以下に示す。
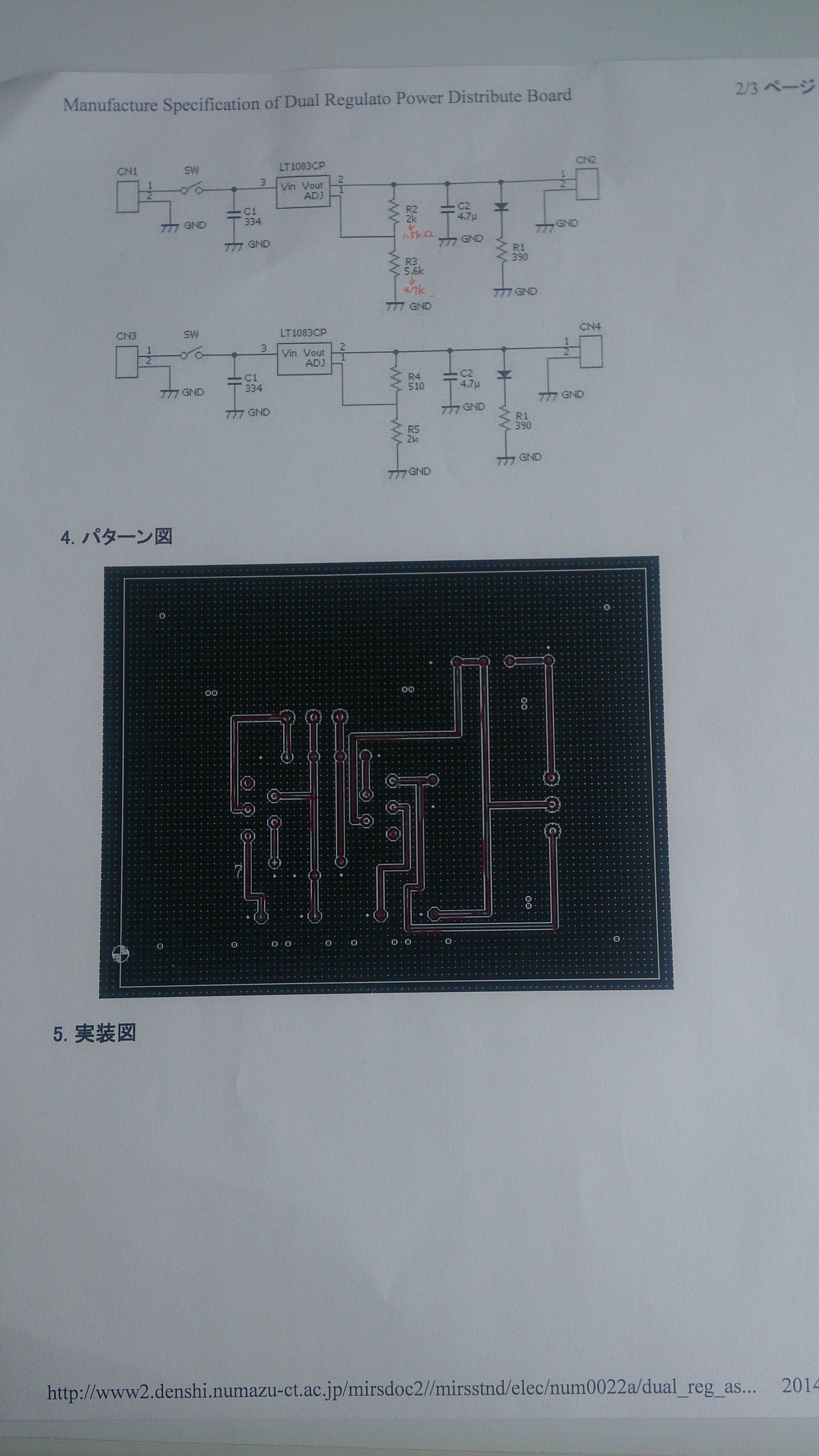
Fig.2 電源ボードの回路図
結線
以下に電源ボードの試験をする際の結線の画像を示す。
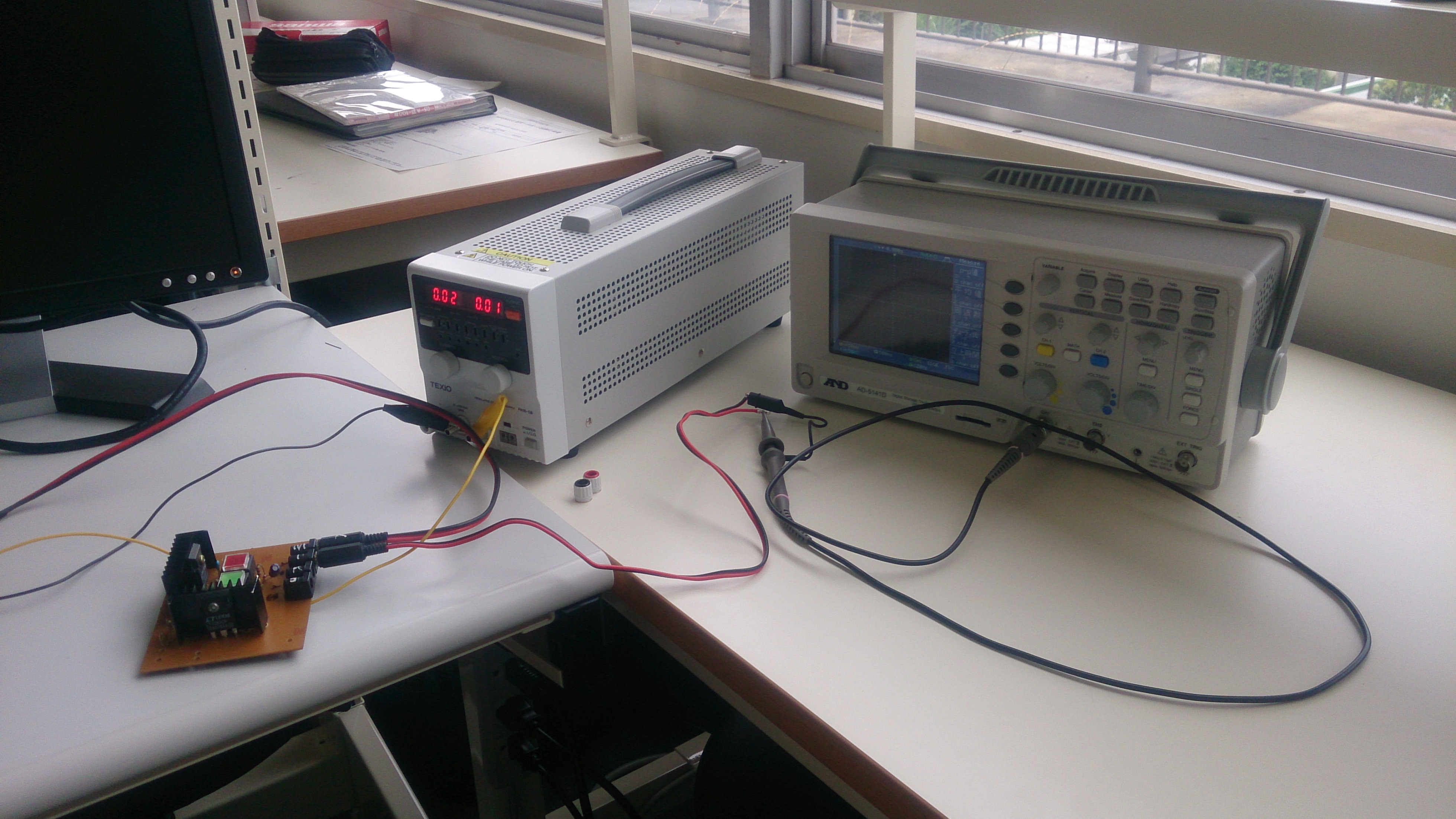
Fig.3 電源ボードの結線
動作試験
電源ボードの試験結果をTable1に示す。
※制御系と駆動系共に三端子レギュレータの設定されている電圧よりも低い電圧をかけた場合、出力電圧は入力電圧よりも低くなった。Table1 電源ボード 動作試験結果表 試験 入力電圧 7.4 7.5 7.6 7.7 7.8 7.9 8.0 8.1 8.2 8.3 8.4 8.5 (V) 出力電圧 制御系 5.31 5.31 5.31 5.31 5.31 5.31 5.31 5.31 5.31 5.31 5.31 5.31 (V) 駆動系 6.24 6.24 6.24 6.24 6.24 6.24 6.24 6.24 6.24 6.24 6.24 6.24 (V)
ドータボード
試験内容
試験内容は標準部品試験計画書 4.2.ドータボードを参照する。試験結果
部品配置確認
2枚のドータボードの部品を仕様書と比較し、目視で確認した。
導通試験
テスターを用いて回路の状態を確認した。確認した所は仕様書の回路図にチェックした。
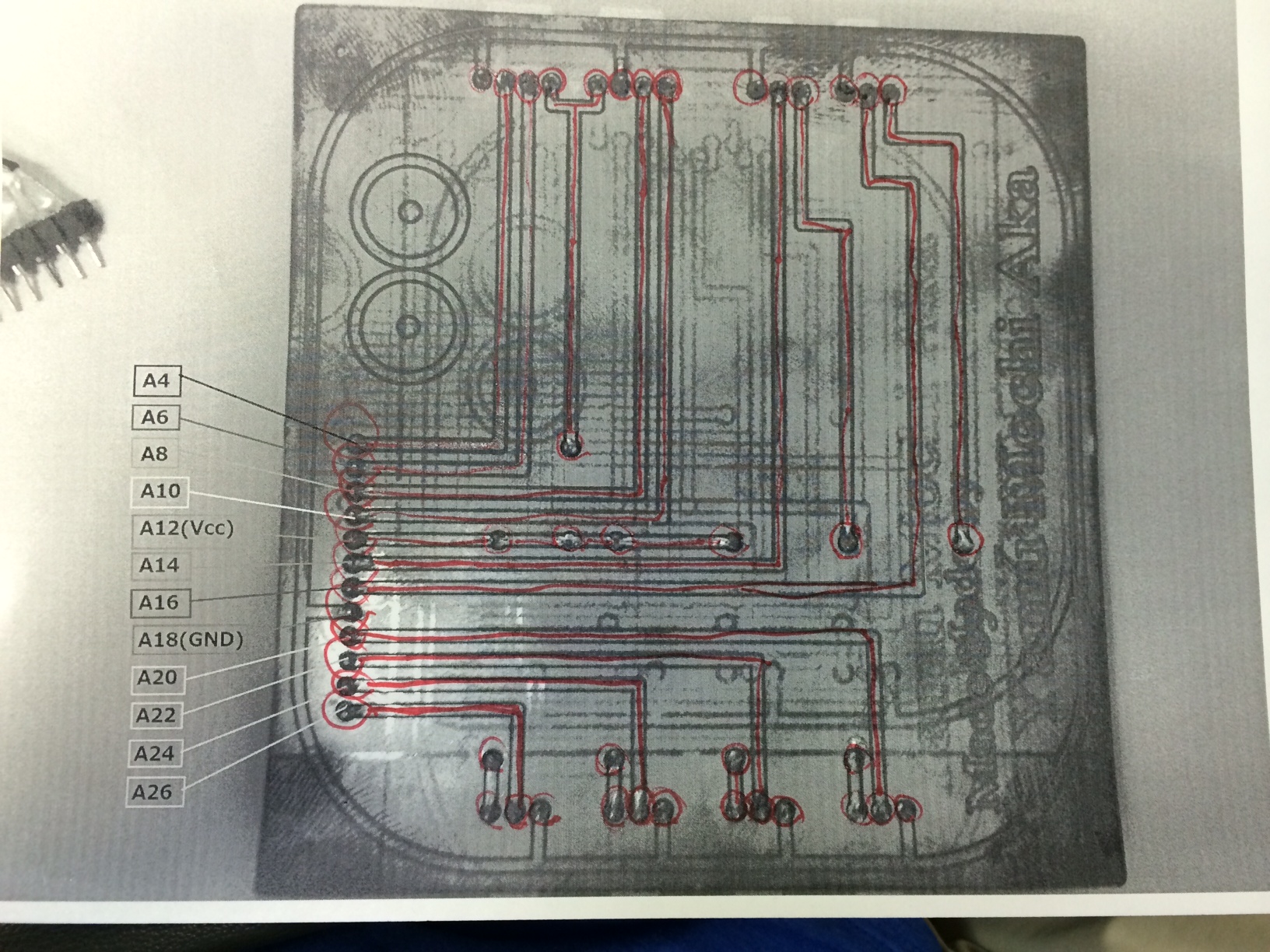
Fig.1 ドータボードのチェック図
結線
以下にドータボードの試験をする際の結線の画像を示す。
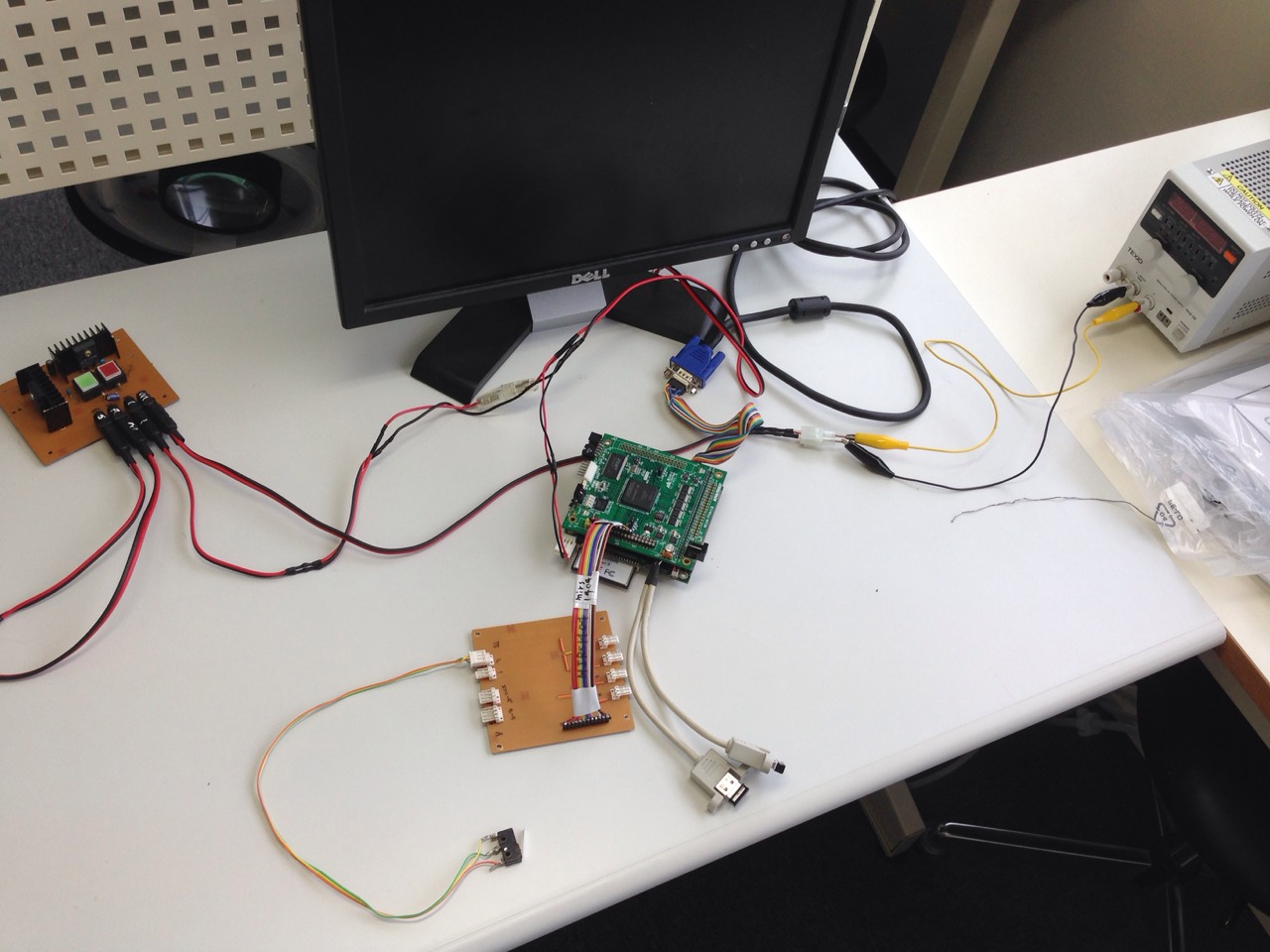
Fig.2 ドータボードの結線
動作試験
ドータボードの試験結果をTable2に示す。
動作試験はすべてタッチセンサで行った。
Table2 ドータボード 動作試験結果表 I/O[1] I/O[2] I/O[3] I/O[4] I/O[5] I/O[6] 合格 合格 合格 合格 合格 合格 I/O[7] I/O[8] TS[1] TS[2] TS[3] TS[4] 合格(※) 合格 合格 合格 合格 合格
※I/O[7]については何らかの問題により、ドータボードをつなぐ前から1を返してしまう。しかしタッチセンサの試験動作では問題なかったので合格とする
モーター制御ボード
試験内容
試験内容は 標準部品試験計画書 4.3.モーター制御ボード を参照する。試験結果
石井・早川でモーター制御ボードの基板を作成、部品取り付け、導通チェックを行った。
部品配置確認
目視で仕様書と基板を確認し、すべての部品が配置されていることを確認した。
導通試験
石井・早川で2枚のモーター制御ボードを各2回ずつ導通チェックを行い、すべての導通すべき箇所の導通を確認した。 回路図上の導通した部分にチェックをした。
以下に導通試験で使用したチェック表をFig.1、Fig.2として示す。
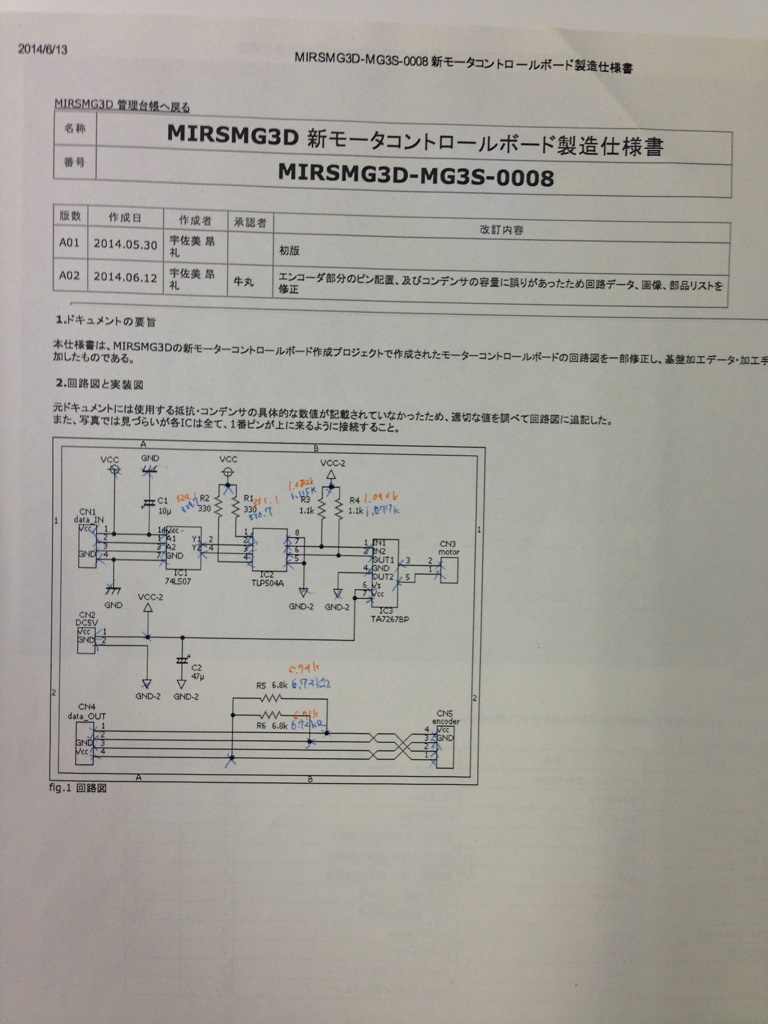
Fig.1 チェック表:石井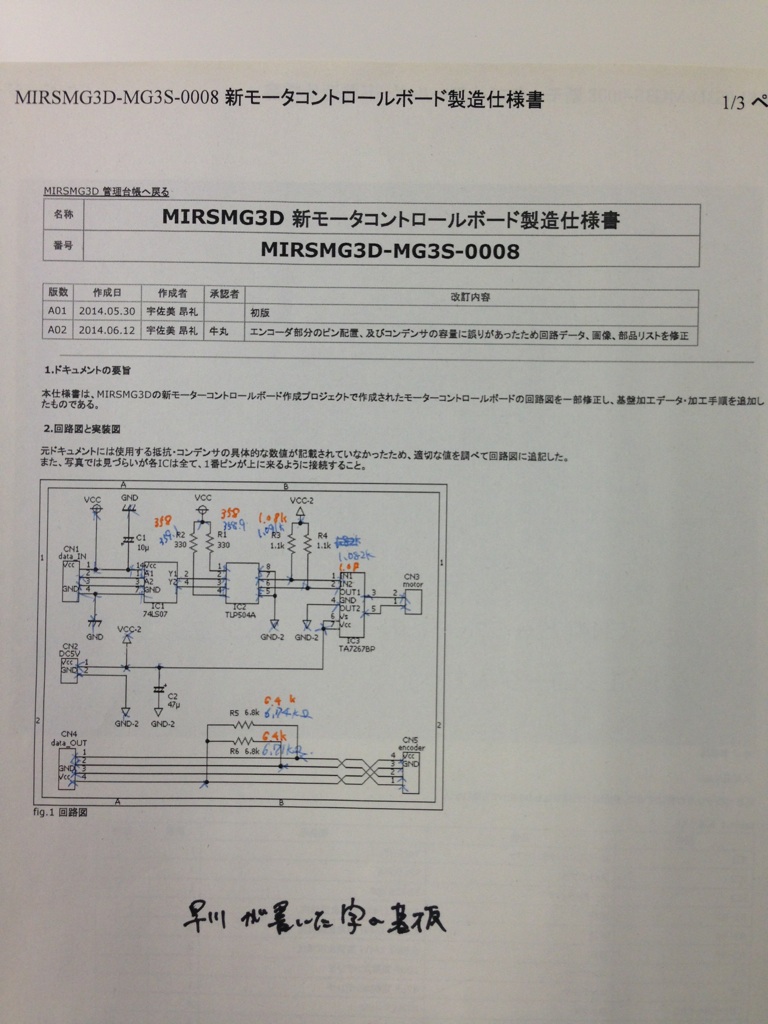
Fig.2 チェック表:早川結線
以下にモーター制御ボードの試験をする際の結線の画像を示す。
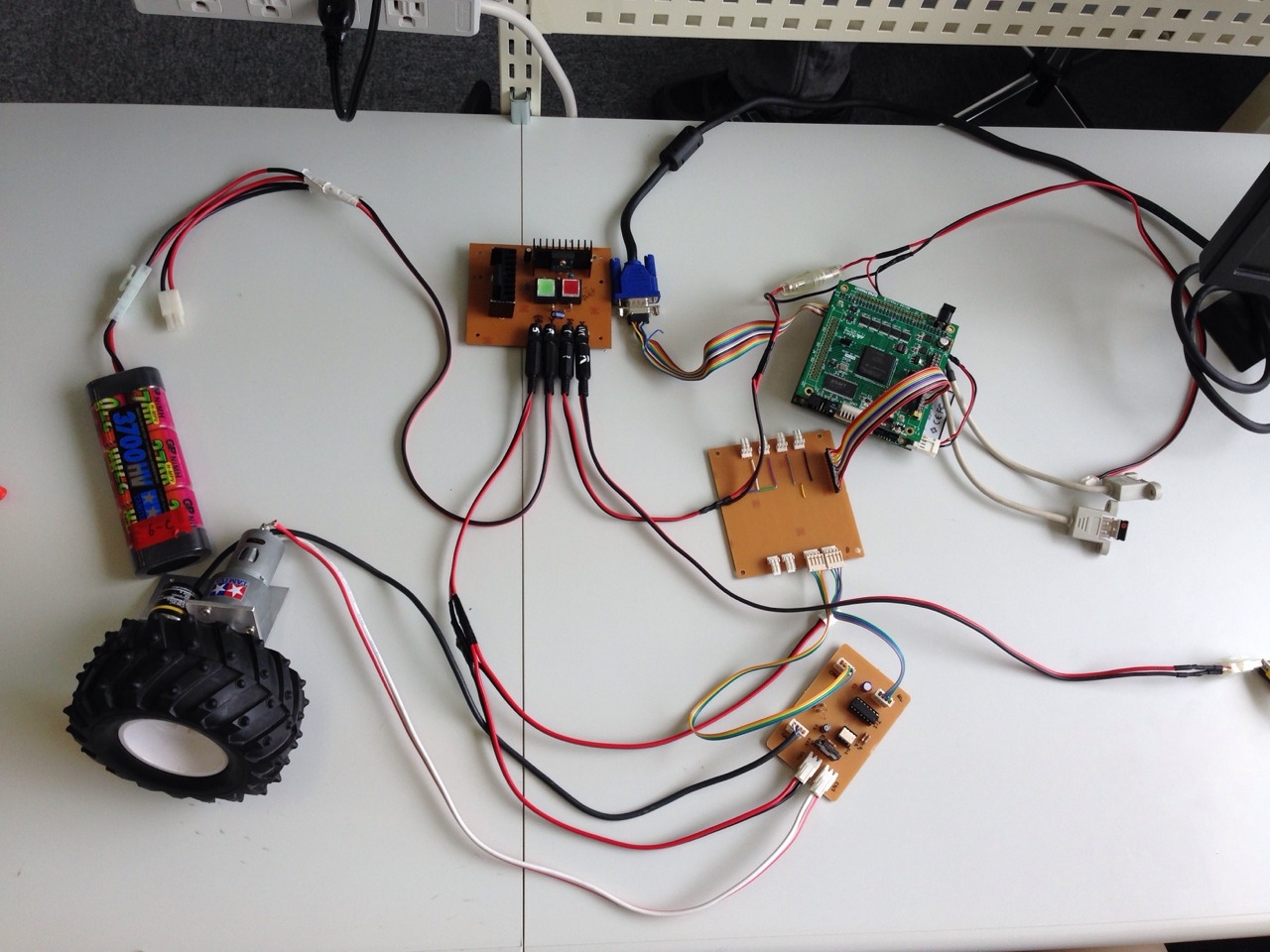
Fig.3 モーター制御ボードの結線
動作試験
動作試験を以下の項目で行い、結果を示す。Table3 モータ制御ボード 動作試験チェックリスト 試験項目 試験者・石井 試験者・早川 モータ駆動(正転) 駆動値120で回転確認 駆動値120で正転動作確認 モータ駆動(逆転) 駆動値-127で正転と逆の回転を確認 駆動値-127で逆転動作確認 ロータリーエンコーダ値 正転のとき増加、逆転のとき減少を確認 モータ駆動の際、正転方向で増加、逆転方向で減少を確認
正転のときは指令値120で回転したが、逆転のときは指令値-120では回転しなく、回転するように手で促せば回転する。
また、逆転の際に-120より小さい指令値または大きい指令値を与えてから指令値-120を与えれば指令値-120で逆転する。
※追記
Table3-1 PWM値の取得結果 モータ +80 -80 +90 -90 +100 -100 +110 -110 +120 -120 +127 -127 右 正転 逆転 正転 逆転 正転 逆転 正転 逆転 実行後、回転しなく、手で促せば多少回るがすぐ止まる。 逆転 正転 逆転 左 正転 実行後回らなかったが手で促して動作した。(遅) 正転 逆転 正転 逆転 正転 逆転 正転 逆転 正転 逆転
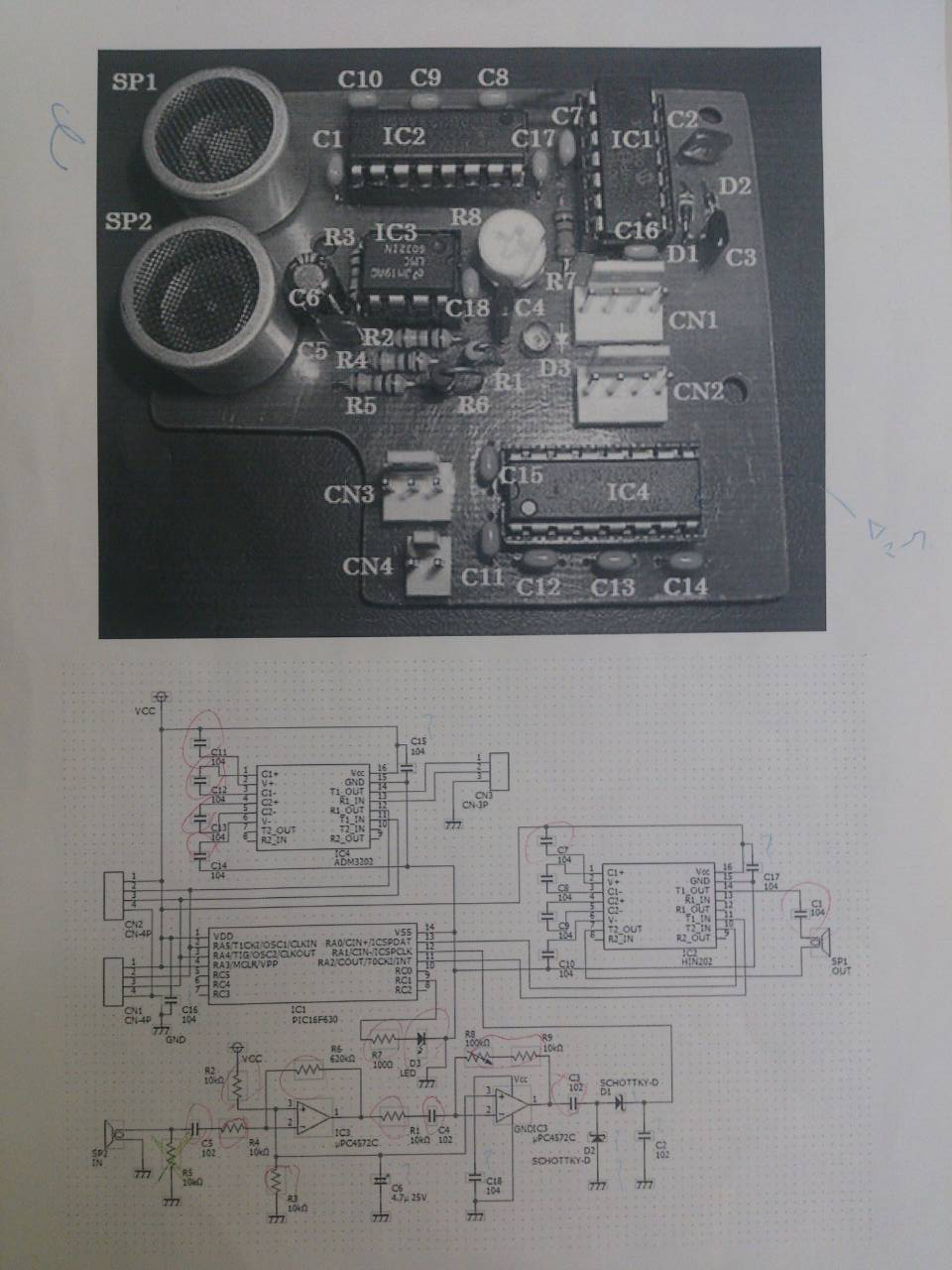
超音波センサボード
試験内容
試験内容は 標準部品試験計画書 4.4.超音波センサボード を参照する。試験結果
部品配置確認
目視で基板と仕様書を比較し、仕様書と同様に部品が取り付けられていることを確認した。
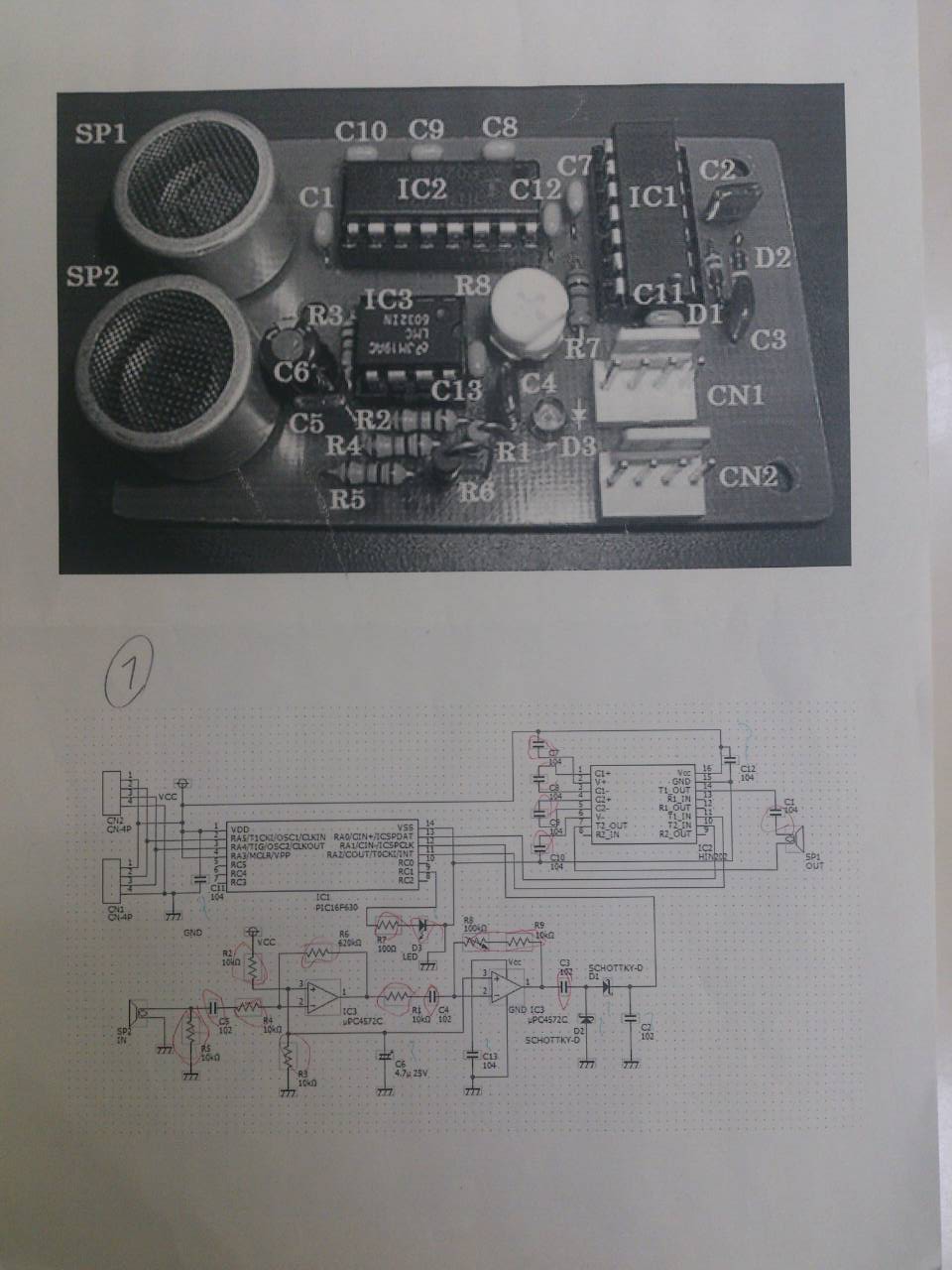
導通試験
太田、加藤で、基板が回路図通り結線されているかを、テスターを用いてチェックした。
結線が危うい箇所は、再度はんだで結線した。
導通試験で使用したチェック表を親機をfig.1、子機をfig.2として以下に示す。
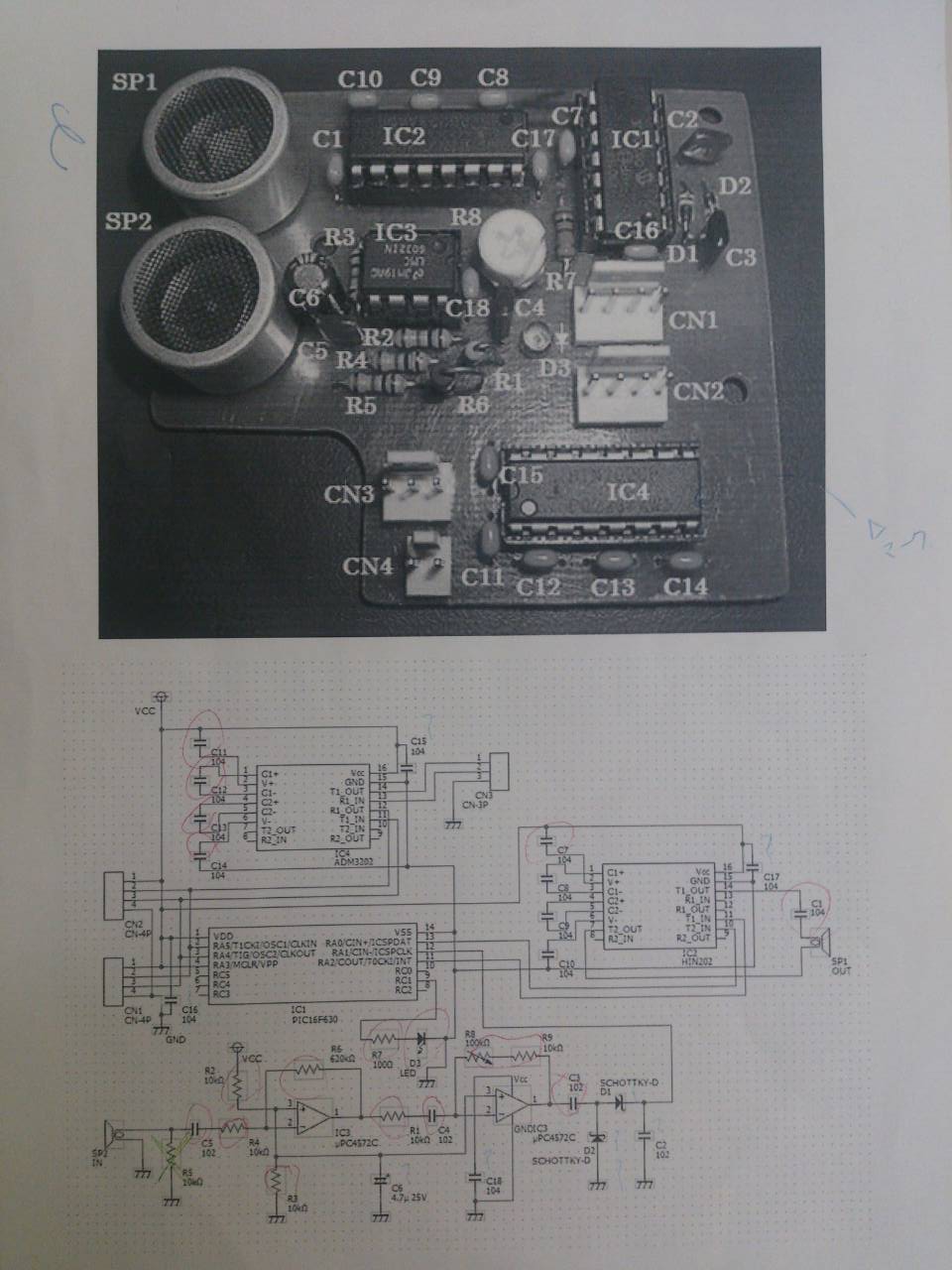
Fig.1 チェック表:親機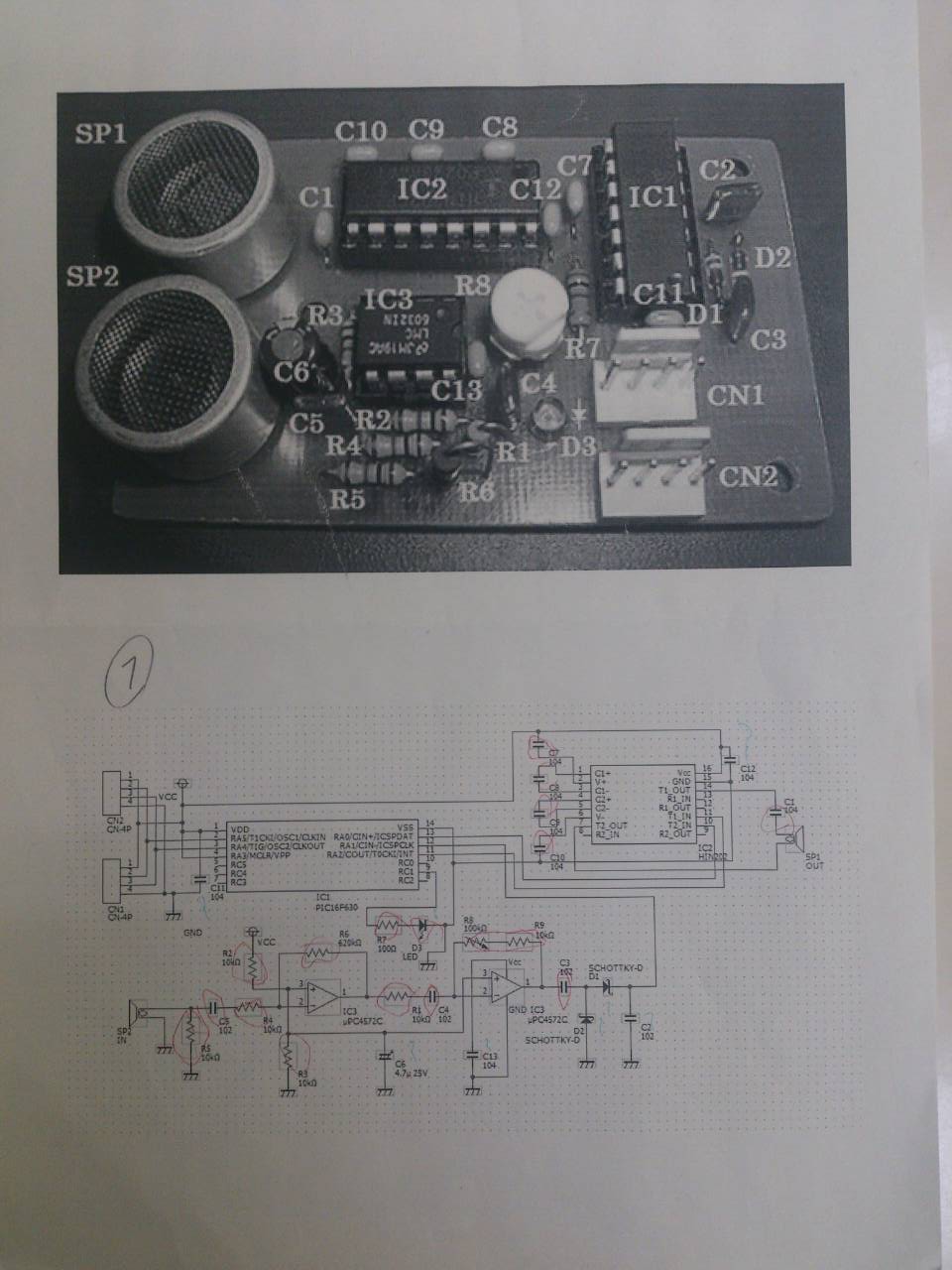
Fig.2 チェック表:子機動作試験
子機3台中、2台は反応しなかったため、反応した子機と、親機の試験結果を記載する
親機と子機に接続されたPICの識別子はそれぞれ親機が2、子機が1であった。
センサの送受信についての試験
まず初めに標準部品試験計画書について"節4.4.4.2.センサの送受信の試験"の結果を記述する。
オシロスコープで確認した識別子の波形の画像を親機をFig.3、子機をFig.4としてそれぞれ以下に示す。
またオシロスコープで測定した箇所についても親機をFig.5、子機をFig.6として同様に示す。
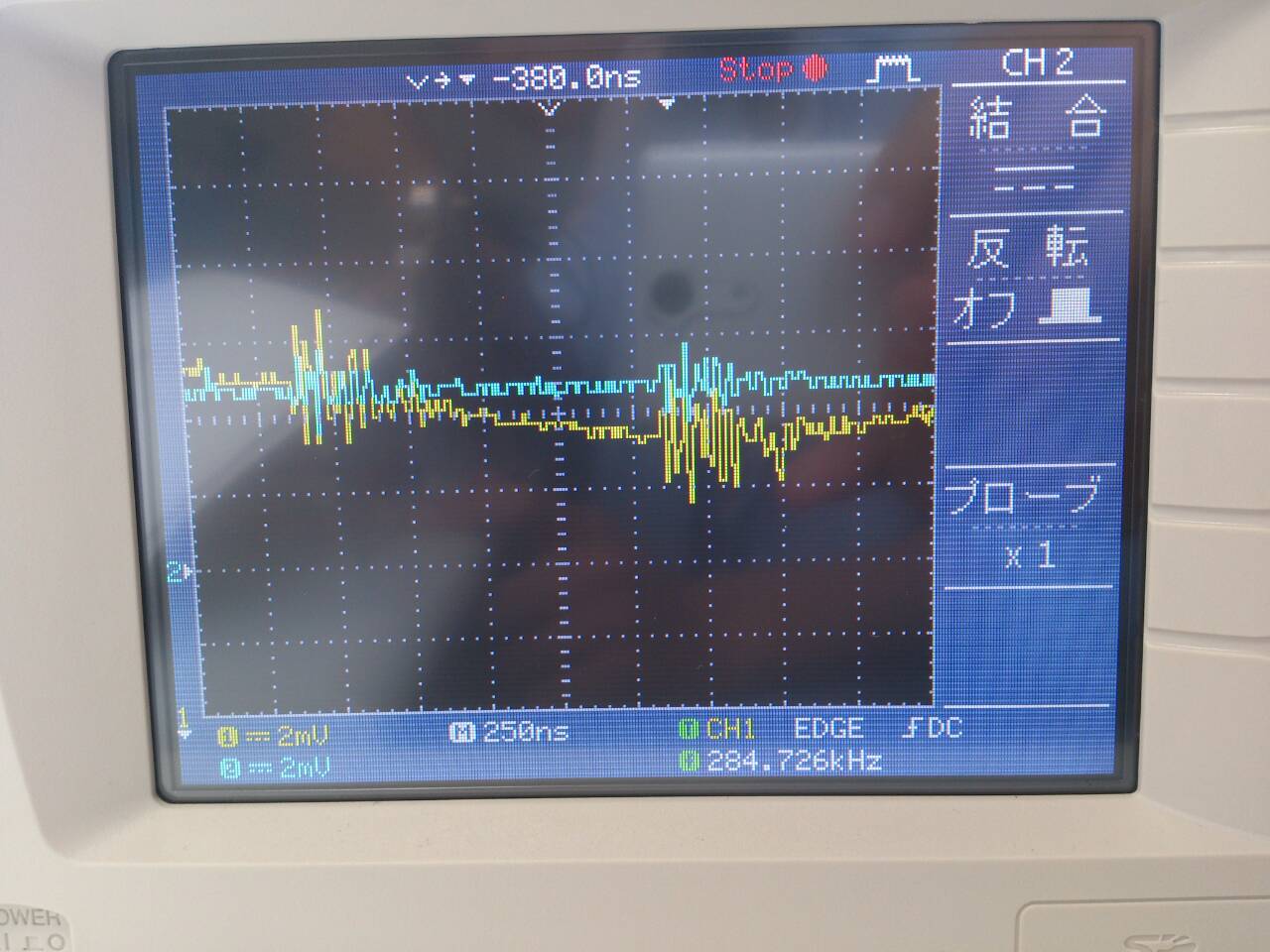
Fig.3 親機の識別子(2)のシリアル波形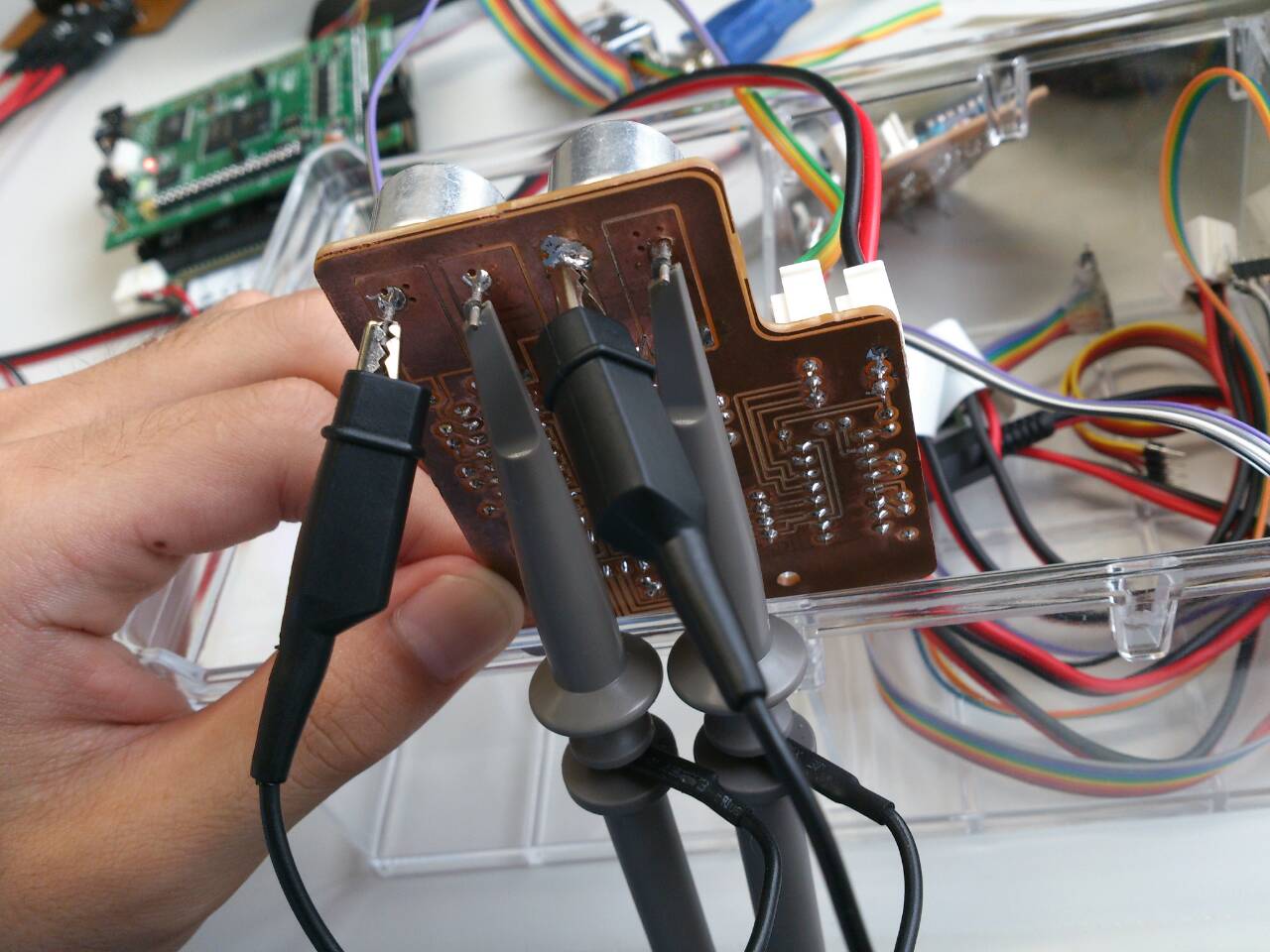
Fig.5 測定箇所
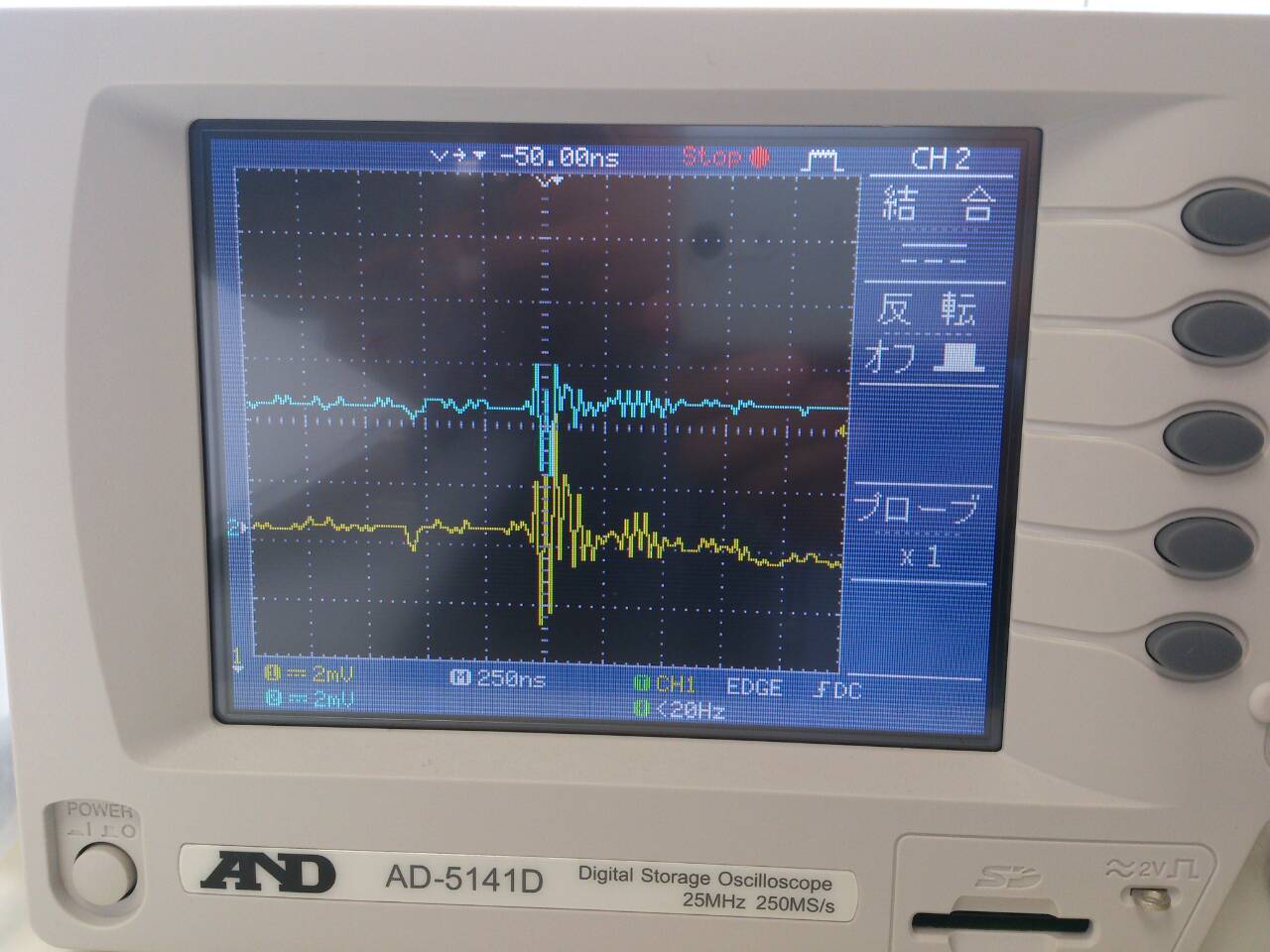
Fig.4 子機の識別子(1)のシリアル波形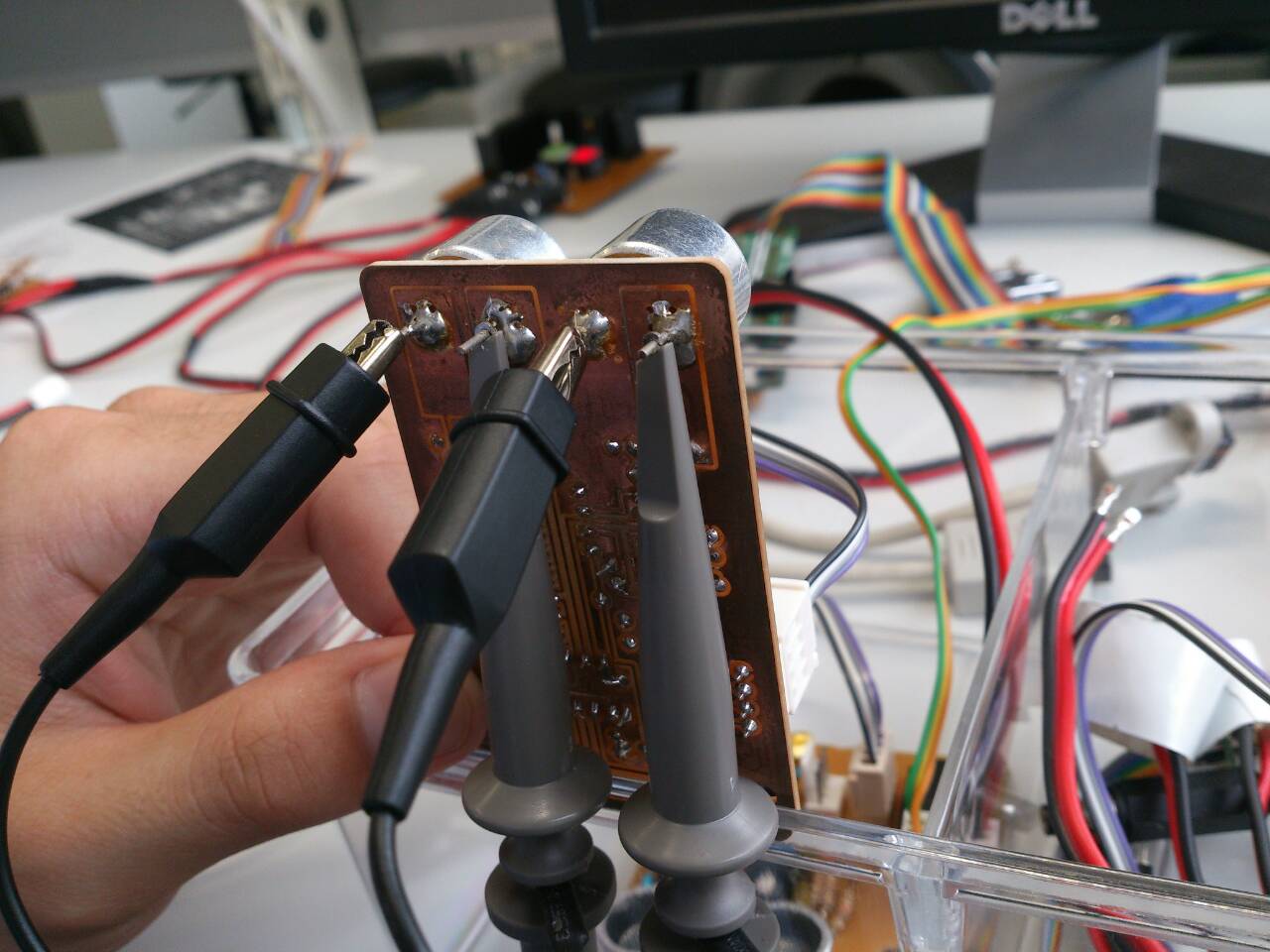
Fig.6 測定箇所
図中オシロスコープ内、黄で表示された波形が送信波であり青で表示された波形が受信波である。
Fig.4及びFig.6より親機と子機のPICの識別子のシリアル波形を確認できた。
またそれぞれの受信機でその波形を読み取れていることが確認できたため、"節4.4.4.2.センサの送受信の試験"を合格とする。距離についての試験及び角度についての試験
次に標準部品試験計画書における"節4.4.4.2. 距離についての試験"及び"節4.4.4.3. 角度についての試験"の試験結果を子機をTable1、親機をTable2として記述し以下に示す。
Table1 超音波センサボード(子機.1) 動作試験結果表 試験 測定距離(cm) 測定角度(°) 子機 測定限界min 20 25 30 35 40 60 80 100 150cm 200cm 測定限界max(表示) -30 20 22 26 32 37 42 63 error error error error 66(70) -20 20 21 25 31 36 40 61 81 error error error 82(84) -10 20 20 25 31 35 40 61 81 error error error 92(94) -5 20 21 25 30 36 40 60 82 error error error 85(88) 0 20 20 25 30 35 40 60 80 101 error error 127(128) +5 20 20 26 31 36 40 60 81 101 error error 119(121) +10 20 20 25 30 36 40 60 81 error error error 91(95) +20 20 21 26 31 36 41 61 83 error error error 81(83) +30 20 22 28 33 37 45 error error error error error 44(50)
表中のerrorでは9999が表示されたことを示している。Table2 超音波センサボード(親機.2) 動作試験結果表 試験 測定距離(cm) 測定角度(°) 親機 測定限界min 20 25 30 35 40 60 80 100 150cm 200cm 測定限界max(表示) -30 error error error error error error error error error error error error -20 20 23 28 34 39 42 63 error error error error 61(65) -10 20 22 27 32 37 42 61 81 error error error 93(95) -5 20 21 26 32 36 41 62 error error error error 76(80) 0 20 20 25 30 35 41 60 80 error error error 92(94) +5 20 21 26 31 36 40 62 error error error error 77(80) +10 20 21 26 30 36 41 60 error error error error 72(75) +20 20 22 25 30 35 41 60 error error error error 77(78) +30 20 21 26 30 35 42 error error error error error 48(49)
Table1、Table2の水平角(0°)より親機及び子機について標準部品試験計画書における"節4.4.4.2. 距離についての試験"の合格基準を満たしていることが確認されたため合格とする。
可変抵抗のゲインを調整し再測定した結果を子機をTable3、親機をTable4として以下に示し、測定限界を確認した画面をスクリーンショットとしてfig.7に示す。
尚、この測定では角度についての試験を実施せず、測定距離は20cmから25cmまでを1cm刻みで新規に測定し80cm、100cm、150cm、測定限界についても新規に測定した。それ以外の値についてはTable1及びTable2より引用した。
Table3 超音波センサボード(子機.1) 動作試験結果表 試験 測定距離(cm) 測定角度(°) 子機 測定限界min 20 21 22 23 24 25 30 35 40 60 80 100 150cm 測定限界max(表示) 0 20 20 21 22 23 24 25 30 35 40 60 80 100 150 247
Table4 超音波センサボード(親機.1) 動作試験結果表 試験 測定距離(cm) 測定角度(°) 親機 測定限界min 20 21 22 23 24 25 30 35 40 60 80 100 150cm 測定限界max(表示) 0 20 20 21 22 23 24 25 30 35 41 60 80 100 150 243
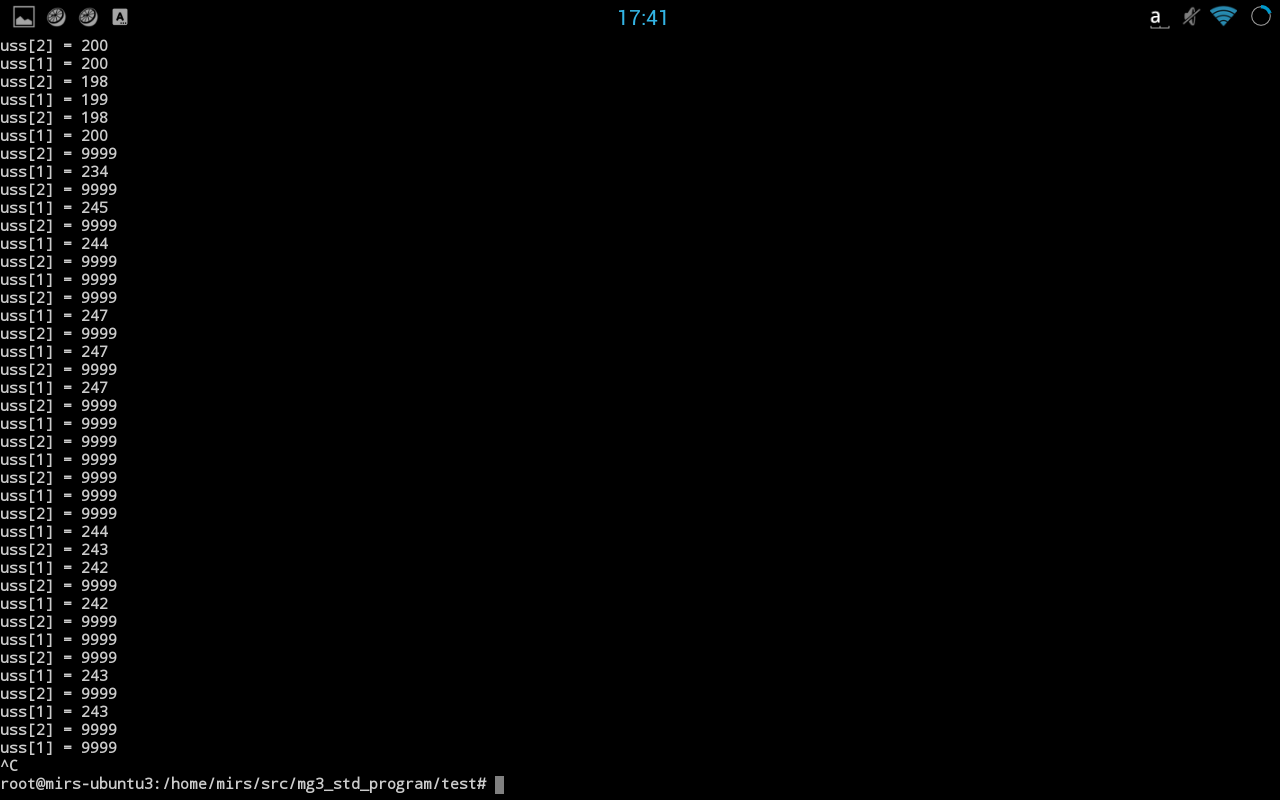
Fig.7 超音波センサの測定限界
Table3、Table4、Fig.7より可変抵抗のゲインを調整することで測定精度と測定限界距離の結果が改善されたことが確認できる。
ケーブル
試験内容
試験内容は標準部品試験計画書を参照する。
強度試験を追加。試験結果
- CPUボード電源ケーブル
- バッテリ接続ケーブル
- ドータボード電源ケーブル
- 電源ボード・モータ制御ボード接続ケーブル
また、ケーブルの強度試験についてはすべてのケーブルの強度は良であった。
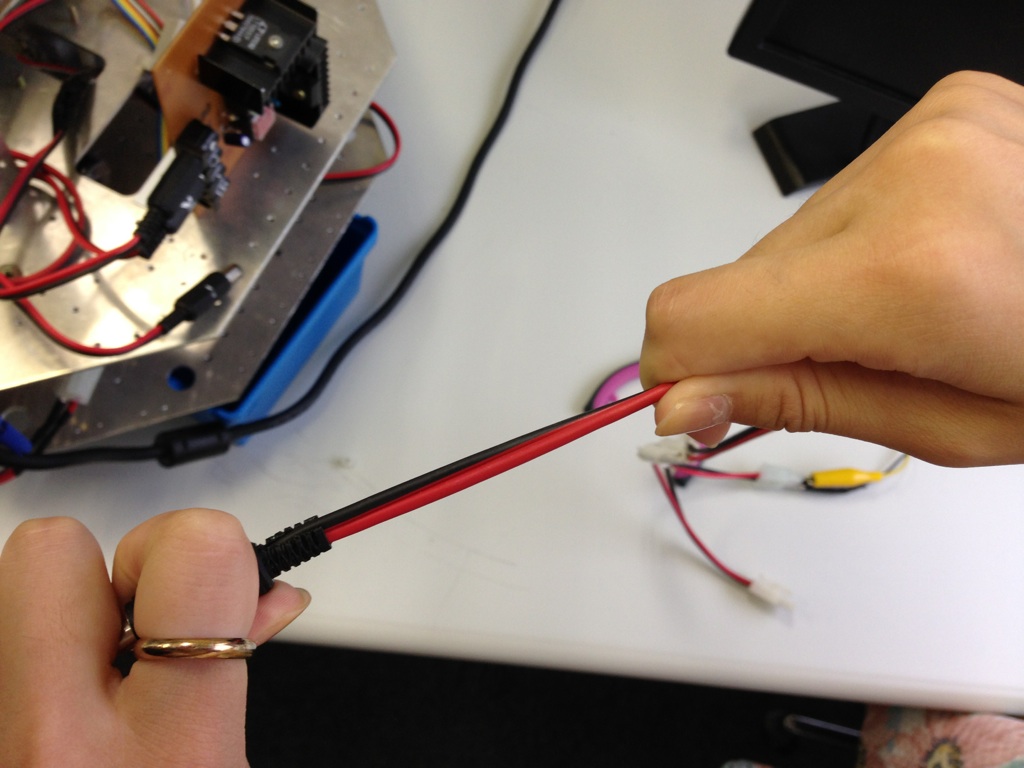
Fig.1 ケーブル強度試験