3.ソフトフェア詳細
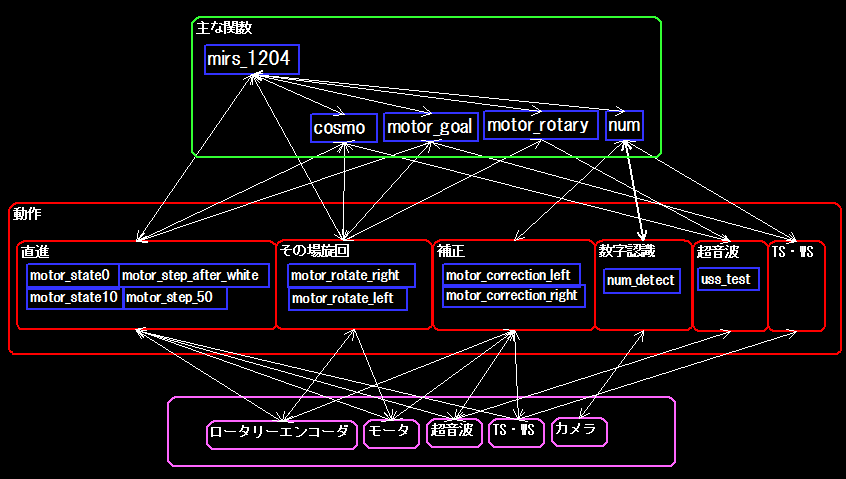
作成関数一覧
| ファイル名 | 関数名 | 概要 |
|---|---|---|
| mirs_1204.c | mirs_1204 | 統合メインプログラム(センサスレッドを含む) |
| motor.c | motor_state0 | 直進 |
| motor_state10 | DB認識失敗時の直進 | |
| motor_step_after_white | 白線認識後の直進 | |
| motor_step_50 | 50cm直進 | |
| motor_step_val | 指令値分直進 | |
| motor_rotate_left | 左90°回転 | |
| motor_rotate_right | 右90°回転 | |
| motor_correction_left | 白線後の左補正 | |
| motor_correction_right | 白線後の右補正 | |
| motor_rotary | 90°旋回(ロータリー攻略専用) | |
| motor_goal | ゴール直前動作(白床認識) | |
| num.c | num | 数字選択 |
| num_detect.c | num_detect | 数字認識 |
| cosmo.c | cosmo | コスモ攻略プログラム |
| uss_test.c | uss_test | 超音波取得用関数 |
走行中に必要となるモータ制御を全て関数として作成し、メインプログラム以外でも呼び出せるようにする。
また、タッチセンサ及び白線センサは画像認識時を除き、スレッドとして常に起動させる。
画像認識プログラムは既存のものではなく、より正確に数字認識可能なプログラムを作成する。
uss_testの中で左右の値の差や一個前の値との差を算出し、走行時の条件判断に用いる。
各関数の状態偏移図を以下に示す。
各仕掛け攻略のフローチャートは競技用ソフトウェア開発計画書参照。
次に、プログラム内でのグローバル変数を定義する。
変数一覧
| 変数名 | 概要 |
|---|---|
| state | メインプログラム内のswitch_case文を動かすための変数。現在の状態を表す |
| state2 | 数字認識で取得した数字を格納する |
| state3 | 1つ前の状態を表す |
| irs_dat[] | タッチセンサ及び白線センサの値を保持 |
| ogie[] | 超音波センサの値を保持 |
stateと名のついた変数はメインプログラム内及び、数字認識、直進走行、コスモ攻略プログラム内で変更するものとし、それぞれの動作が終了したときは必ずメインプログラムに一回戻る。
続けて、stateの数字に対応する状態を定義する。
状態一覧
| 数字 | 状態 | 使用関数 |
|---|---|---|
| 0 | 通常走行 | motor_state0 |
| 1 | motor_state0時のT字路攻略 | uss_test,motor_rotate_right,motor_rotate_left |
| 2 | motor_state10時のT字路攻略 | uss_test,motor_rotate_right,motor_rotate_left |
| 3 | 小部屋 | cosmo(uss_test,motor_step_50,motor_rotate_left,motor_rotate_right) |
| 4 | ロータリー | uss_test,motor_rotate_right,motor_rotary |
| 5 | 白床認識 | motor_goal |
| 10 | 直進走行(DB認識失敗時) | motor_state10 |
| 12 | 画像認識 | num,num_detect,motor_correction_right,motor_correction_left |
| 50 | ゴール動作 | motor |