本ドキュメントは、MIRS1204の標準機における競技用ソフトウェアの開発概要と日程についてまとめたものである。
得点を犠牲にしても通路選択でより確実な方を選択する、とにかくゴールを目指すこと 重視のプログラムの設計を目標とする。
MIRS1204では、基本的に以下の3つのスレッドを利用して動作させる。
| スレッド | 概要 | プログラム上での関数名(仮) |
|---|---|---|
| メインスレッド | センサーの値を受け取り状態を決定、動作スレッドに動作を指定する | int main() |
| センサースレッド | センサーの値を監視し、メインスレッドに送る | int sensor() |
| 画像認識スレッド | 画像認識専門のスレッド | int picture() |
- 3-1.プログラム全体概要
-
プログラム全体のフローチャートを以下に示す。
数字認識から仕掛けを選ぶ際の優先度はプログラムの完成度に従い成功率の高いものとするため現段階では未定とする。
ステップとシーソーについては特別にプログラムを組む必要があるか疑問が残るため現時点では考えないものとする。
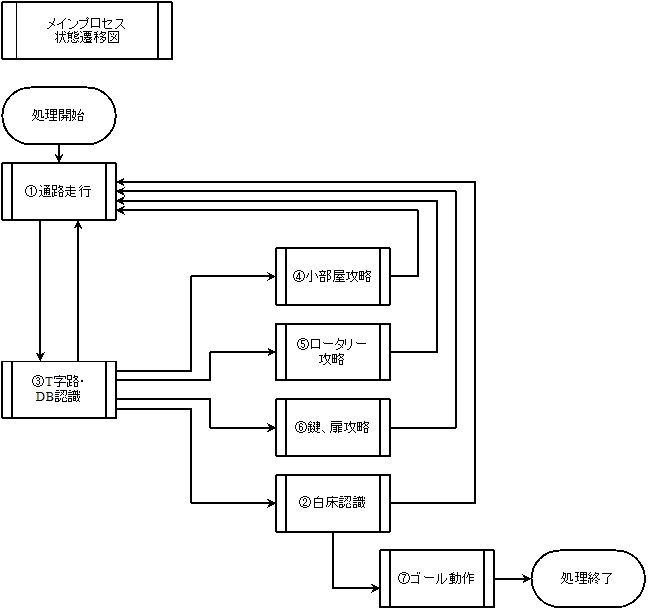
Fig.2 プログラム全体フローチャート
状態遷移の条件を以下に示す。
状態遷移条件表
| 番号 | 機能名 | 機能概要 | 使用する要素 | |
|---|---|---|---|---|
| 要素機能 | 1-1 | 直進走行 | 指定した距離を直進する。 | |
| 1-2 | 回転走行 | 指定した角度でその場回転する。 | ||
| 1-3 | 周回走行 | 指定した半径で、指定した角度を、指定方向に周回する。 | ||
| 1-4 | 超音波距離計測 | 超音波で物体との距離を計測する。 | ||
| 1-5 | タッチセンサ認識 | タッチセンサのON/OFFを認識する。 | ||
| 1-6 | 白床認識 | 白床を認識する。 | ||
| 1-7 | 数字認識 | DB上にある数字を認識する。 | ||
| 補正・復帰機能 | 2-1 | 方向補正 | 左向きの超音波センサを使用し、左側との壁との距離を一定に保つ。 | 1-1, 1-2, 1-4 |
| 2-2 | 通路復帰 | タッチセンサが反応したら、通路中央に復帰する。 | 1-1, 1-2, 1-4, 1-5 | |
| 仕掛け通過 | 3-1 | T字路走行動作 | DBにて走行方向を判断後、T字路を走行する。 | 1-1, 1-2, 1-4, 1-6, 1-7,4-1 |
| 3-2 | ロータリー通過 | ロータリーを攻略する。 | 1-1, 1-2, 1-3, 1-4 | |
| 3-3 | 小部屋通過 | 小部屋を攻略する。 | 1-1, 1-2, 1-4 | |
| 3-4 | 鍵通過 | DBにて扉を判断し、扉を通過する。 | 1-1, 1-2, 1-4, 1-5 | |
| 3-5 | ゴール | 白い床を判断し、ゴール判断をする。 | 1-1, 1-6 | |
| 通路走行 | 4-1 | 通路走行 | 1-1, 1-2, 1-4, 1-5, 1-6, 2-1, 2-2 |
- 単体テスト仕様
- 走行制御
直進走行:1mを前後10cm以内の精度で直進する。
回転走行:90°を±10°以内で回転する。
周回走行:半径35cmの円を、半径1.75cm・周回方向±18°以内で1周する。(±5%) - 超音波距離測
20cmから1.5mまでを誤差3cm精度で計測する。
- 走行制御
- 各仕掛けについて
- 通路走行
- 機能概要: 仕掛け以外の通路の走行を制御する
- 性能要求: 通路走行の成功率を95%以上とする
- 利用する機能: 直進、回転、周回、超音波計測、白線センサ検知、壁検知
- ロータリー
- 機能概要: ロータリー内の走行を制御する
- 性能要求: 仕掛け攻略の成功率を90%以上とする
- 利用する機能: 直進、周回、超音波計測、壁検知
- 小部屋
- 機能概要: 小部屋内の走行を制御する
- 性能要求: 仕掛け攻略の成功率を90%以上とする
- 利用する機能: 直進、回転、超音波計測、壁検知
- T字路
- 機能概要: T字路走行を行う
- 性能要求: 数字認識により決定した方向に曲がる確率を90%以上にする
- 利用する機能: 直進、回転、超音波計測、壁検知
- 標準ソフトの関数を調整して利用するもの
1-1 直進走行
1-2 回転走行
1-3 周回走行
1-4 超音波距離測定
1-5 タッチセンサ認識
1-6 白床認識
1-7 数字認識
2-1 正対補正
- 新たに作成する関数
2-3 通路復帰
3-1 T字路動作
3-2 ロータリー通過
3-3 小部屋通過
3-4 鍵通過
3-5 ゴール
4-1 通路走行
各モジュールの機能関数を用いてあらわしたフローチャートを以下に示す。
- 6-1.通路走行
-
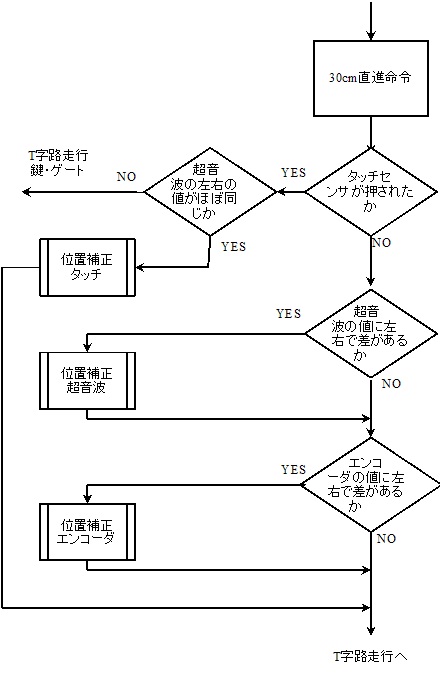
- 前方のタッチセンサと超音波センサによりT字路・曲がり角・行き止まりを検知する
- 曲がり角の場合は、その場で90°回転し、走行
- 直進の場合は、超音波センサやロータリーエンコーダなどを使用し、壁に接触しないように走行する
- 壁に接触した場合、後退し超音波計測で周りの状況を計測して向きを変更する
- 6-2.白床認識
-
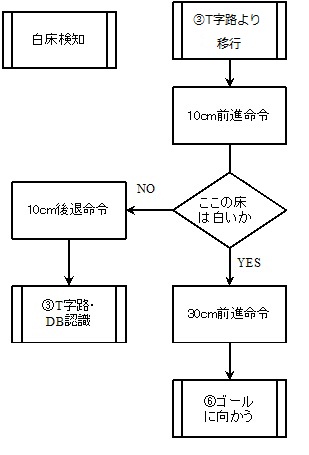
- 白線センサが白床を検知する
- それが本当に白床かを確認するため、10cm前進
- 前進した先で白床を検知 ⇒25cm前進し、ゴール動作へ
前進した先が白床でない ⇒10cm後退し、元の位置に戻り、DBの有無の確認を行う
- 6-3.T字路
-
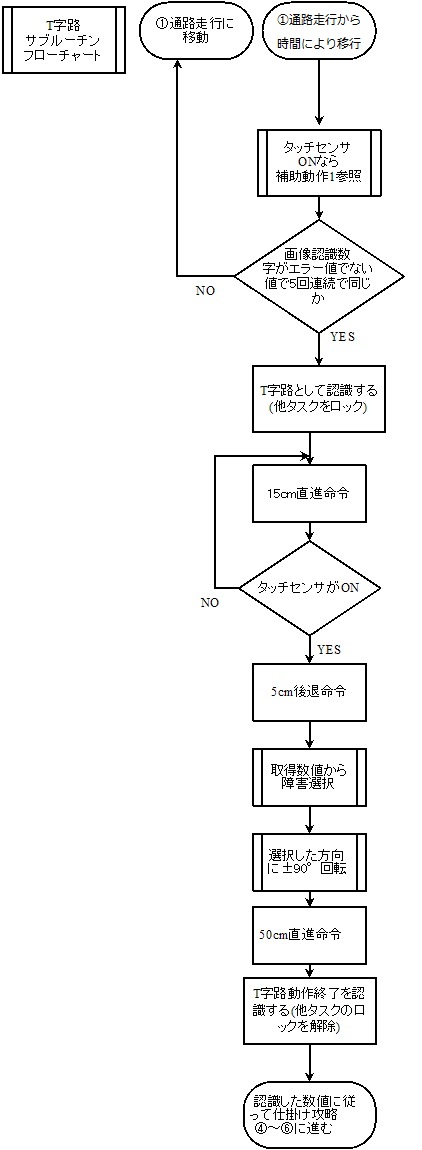
※T字路補助動作
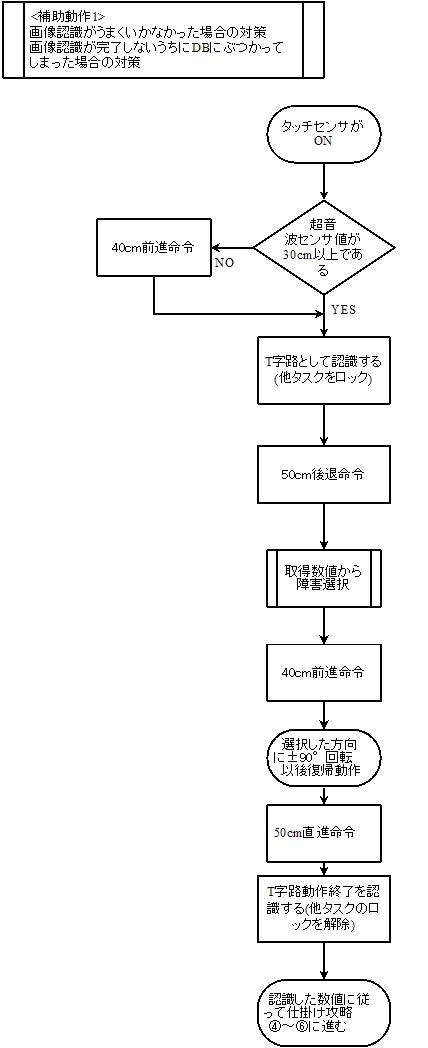
- 通路走行を行う
- 画像を取得し、数字認識処理を行う
- 正しく認識できた場合 ⇒4.に移行
正しく認識できなかった場合 ⇒2.に戻る - T字路攻略のプログラムに移行する
- 6-4.小部屋
-
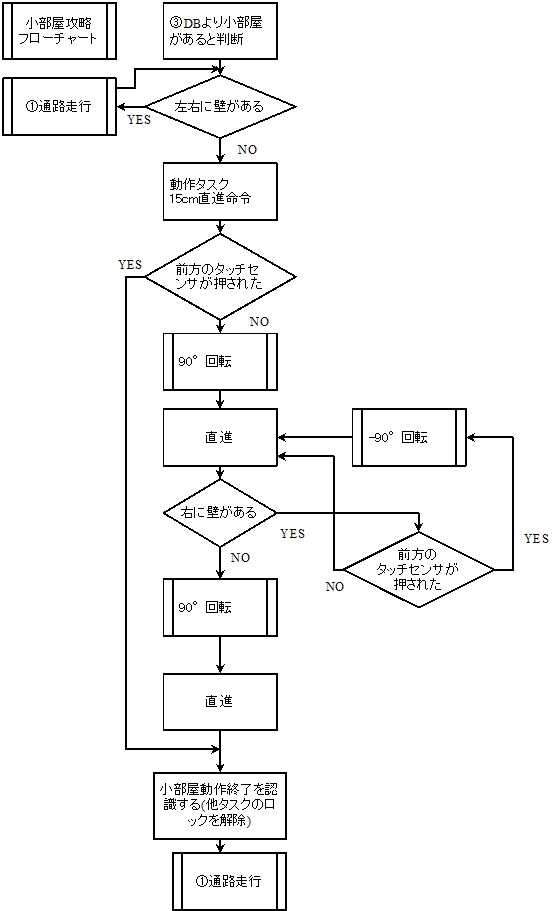
- DBで識別後、小部屋に侵入したことを超音波センサで判断
- 左の壁伝いで、出口を探しながら走行する
- 見つけたら出る or 前方のタッチセンサに反応があれば90°回転して再度探索する
- 6-5.ロータリー
-
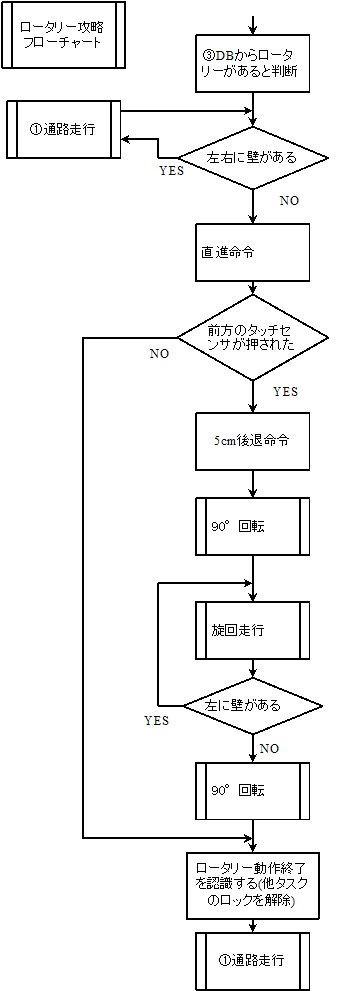
- DBで識別後、ロータリーに侵入したことを超音波センサで判断
- ロータリーに侵入後その場で90°回転し超音波を駆使し、旋回走行する
- 超音波センサを用いて、出口と判断した場合 ⇒4に移行
出口と判断しなかった場合 ⇒2.に戻る - 90°回転し、ロータリーを出る
- 6-6.鍵と扉
-
- DBで識別後、鍵ではなく扉の方へ移動しこれを抜ける
- 6-7.ゴール動作
-
- パフォーマンス的なこと
競技プログラムの開発工程を以下に示す。
メカ、エレキの担当者は終了次第ソフトウェアの開発を進める。
システム開発計画書