| 名称 |
MIRS1102 システム基本設計書 |
| 番号 |
MIRS1102-DSGN-0002 |
最終更新・2011.11.21
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2011.11.21 |
伊庭達哉 |
望月康孝 |
初版 |
目次
1.はじめに
-
本ドキュメントは、MIRS1102のシステムの基本的な設計内容を示し、今後のMIRS開発のスケジュールをまとめたものである。
2.ハードウェア
標準機から変更する部品
-
MIRS1102はできる限り標準機から部品を取り替えない、かつ余計な機能はつけない方針で製作を行う。ただし、シーソー攻略の際タイヤが浮く・走行速度が速く制御しにくいという2つの問題点から、次のような対策を講じた。
- サスペンションの導入(サスペンションはMIRS1001の機構をそのまま採用する。)
- モータのギヤヘッドを1/36から1/75へ交換
サスペンションの導入については、システム提案書でも述べたとおり、シーソー攻略の際にタイヤが浮くことを防ぐために車高をあげることによる不安定化をなくす目的がある。
次にモータのギヤヘッドについてだが、これもシステム提案書で述べたとおり、モータの速度を下げることにより、直進などの制御を行いやすくする目的でギヤヘッドを変更する。現在のMIRS標準機に搭載されているモータのギヤヘッドは1/36である(AO-8001 タミヤギヤードモーター 3633K36 リンク先参照)。これを、モータを変えずにギヤヘッドのみをギヤ比1/75の"AO.8045 ギヤヘッドK75"に取り替える。部品詳細を示す。
| ITEM |
商品名 |
ギヤ比 |
価格 |
送料 |
個数 |
| 89893 |
AO.8045 ギヤヘッドK75 |
1/75 |
3,150円(3,000円) |
240円 |
2個 |
その他の変更
-
前に述べたとおり、MIRS1102はできる限り標準機から部品を取り替えない。しかし、車高を変えたり、超音波センサを増設(詳しくは下記)したりする関係上、MIRSの基盤配置などを改善しなければならない。その概要を示す。
- 下段シャーシ上に取り付けられている、モータ/ロータリーエンコーダ取り付け用金具を、下段シャーシの下側につけ直す。
- ・・・車高を高くするため
- 超音波センサを前向きに2つ、左/右向きに1つずつ、合計4つの超音波センサを取り付ける。
- ・・・前方に2つ取り付けるのは、DBに対して正面を向くように正対補正をかけるためで、左右に1つずつ取り付けるのは通路走行などのソフトウェア攻略の際に必要になるため(詳しくは下記)
3.ソフトウェア
機能定義
-
MIRS1102がコースを攻略する再に必要となるソフトウェアの機能の定義及び、その性能について示す。
直進走行
-
機能概要:要求された距離を、指定した一定速度でまっすぐ走行する。
性能要求:1mの距離を、左右のずれを2cm以内、前後のずれを2cm以内に抑える
回転走行
-
機能概要:要求された角度だけ、指定した一定速度で、指定した回転方向でその場回転する。
性能要求:90度、180度を±5度以内でその場回転する。
旋回走行
-
機能概要:要求された半径・角度・方向に基づき、指定した一定速度で弧を描いて走行する。
性能要求:ロータリー用に旋回半径35cmで180度旋回した時に、回転のずれを±5度以内、左右のずれを±2cm以内に抑える。
超音波計測
-
機能概要:目的の物体との距離を計測する
性能要求:20cmから50cmまでの距離を5%未満の精度で計測する。
白線センサ検知
-
機能概要:床面の白線を検知する。
性能要求:白線の検出率を90%以上にする。
壁検知
-
機能概要:タッチセンサのON/OFFにより、壁との接触を検知する。
性能要求:壁接触時の誤作動率を10%未満にする。また、壁に接触していないときに、壁検知をする誤作動はないようにする。
数字認識処理
-
機能概要:DBの数字を認識する。
性能要求:白線からの距離(約60cm)の距離からDBの数字を認識し、0~9のすべての数字で認識率90%にする。
4.パート毎の開発要素
-
新たに開発する要素は主にサスペンションであるが、その機構はMIRS1001のものをそのまま採用するため、考えるのはサスペンションの寸法である。サスペンションの寸法をある程度の範囲まで絞り込むための計算は、詳細設計にて行う。ある程度の範囲まで寸法を絞り込んだら、後は試行錯誤で適正の寸法を定める。
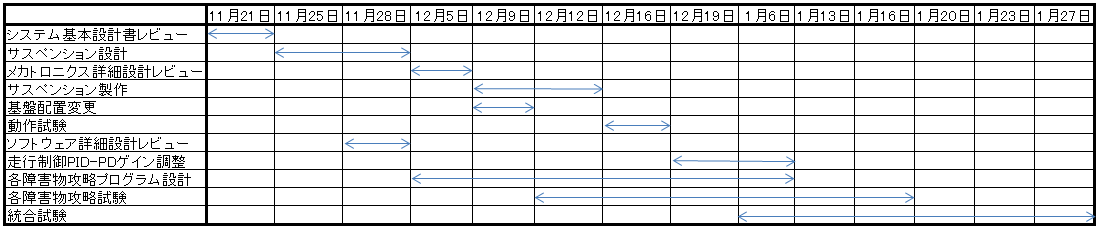
5.開発スケジュール
-
競技会までの開発のスケジュールを示す。ただし、あくまで予定であるので、状況に応じて変更はある
6. 関連文書
沼津工業高等専門学校 電子制御工学科