| 名称 |
MIRS1102 システム提案書 |
| 番号 |
MIRS1102-DSGN-0001 |
最終更新・2011.10.24
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2011.11.14 |
伊庭達哉 |
望月康孝 |
初版 |
| A02 |
2011.11.21 |
伊庭達哉 |
望月康孝 |
モータまわりの内容修正 |
目次
1.はじめに
-
本ドキュメントは、MIRS1102のシステムを提案するドキュメントである。
2.システム概略
-
我々MIRS1102班は、ハードウェアに関してはできる限りシンプルな設計を行うことをコンセプトに、できるだけ標準部品を用い、できる限り改造を行わない方針でMIRS1102の開発を行う。一方で、ソフトウェアに関しては、より確実なプログラムの設計を行うことをコンセプトに、時間はかかっても確実に障害物をクリアするようなプログラム設計をする。
少し具体的な提案を次に示す。
- ・メカトロニクス
- メカトロニクスの改造を行うときに、最重要視しなければならないのは、シーソーの攻略であると考えた。その理由として、シーソーとステップ以外の障害物は、あらかじめDBによって示されるため、ソフトウェアの方である程度回避することが出きるが、シーソーとステップは予告なしに置かれるため、ソフトウェアだけでの攻略が非常に困難であることと、そもそも標準機の構造上、そのままシーソーを走行しようとすると、タイヤが浮いてしまい進めなくなるという問題が発生しているため、ということがあげられる。シーソー攻略の際にある程度衝撃に強い改造を施すつもりであるため、ステップの攻略についてはそれほど重要視しなかった。
シーソー攻略のポイントとして、次の2つの改造を提案した。
- モータの取り付け位置を下げ、モータのギヤ比を調整する。
- サスペンションを取り付ける
1つ目の目的としては、タイヤの位置を下げることで、シーソーの進入、脱出の際にタイヤが浮いてしまう問題を回避することである。
2つ目の目的としては、タイヤの位置を下げると前後のバランスがとれなくなってしまうので、サスペンションを取り付けることにした。これによって衝撃緩和だけでなく、シーソー攻略時でない通常走行時の、MIRS車体の安定化も実現できる。
加えてギア比を変えるのは、ギヤ比を変えて走行速度を落とすことにより、直進の制御がしやすくなると考えたからである。これにともなって、発進時の左右のタイヤの回転開始時間の差を軽減させる可能性もある。
- ・エレクトロニクス
- 今回の改造では、エレクトロニクス関連の改造は行わないこととした。但し、通路走行、生体補正のアルゴルズム関係上正面に2つ、左右に1つずつ必要になる為、新規に1つ超音波センサを作成する。
- ・ソフトウェア
- MIRS競技会で成功するには、いかに確実なプログラムを製作できるかにあると考えたため、プログラムにより時間をかけることを考えている。中でも特に重要と考えたのは、より正確な直進を行うことである。正確な直進を行えるアルゴリズムを開発できれば、回転、旋回の精度もあがり、できる限り壁にぶつかることなく競技場を進むことができると考えた。標準プログラムでもある程度正確な直進ができるが、その引数が汎用性という点で適切ではないと考え、あらたに直進のプログラムを開発することにした。これに伴い、回転、旋回のプログラムも同様に独自開発することにした。
数字認識プログラムは書き換えが困難であるため、標準プログラムをベースとして、複数の数字を認識できるように作り替えることにした。
各障害物(小部屋やロータリーなど)の攻略についても我々独自の攻略法を用いたオリジナルのプログラムを作成することにした。
3.システム外観図
-
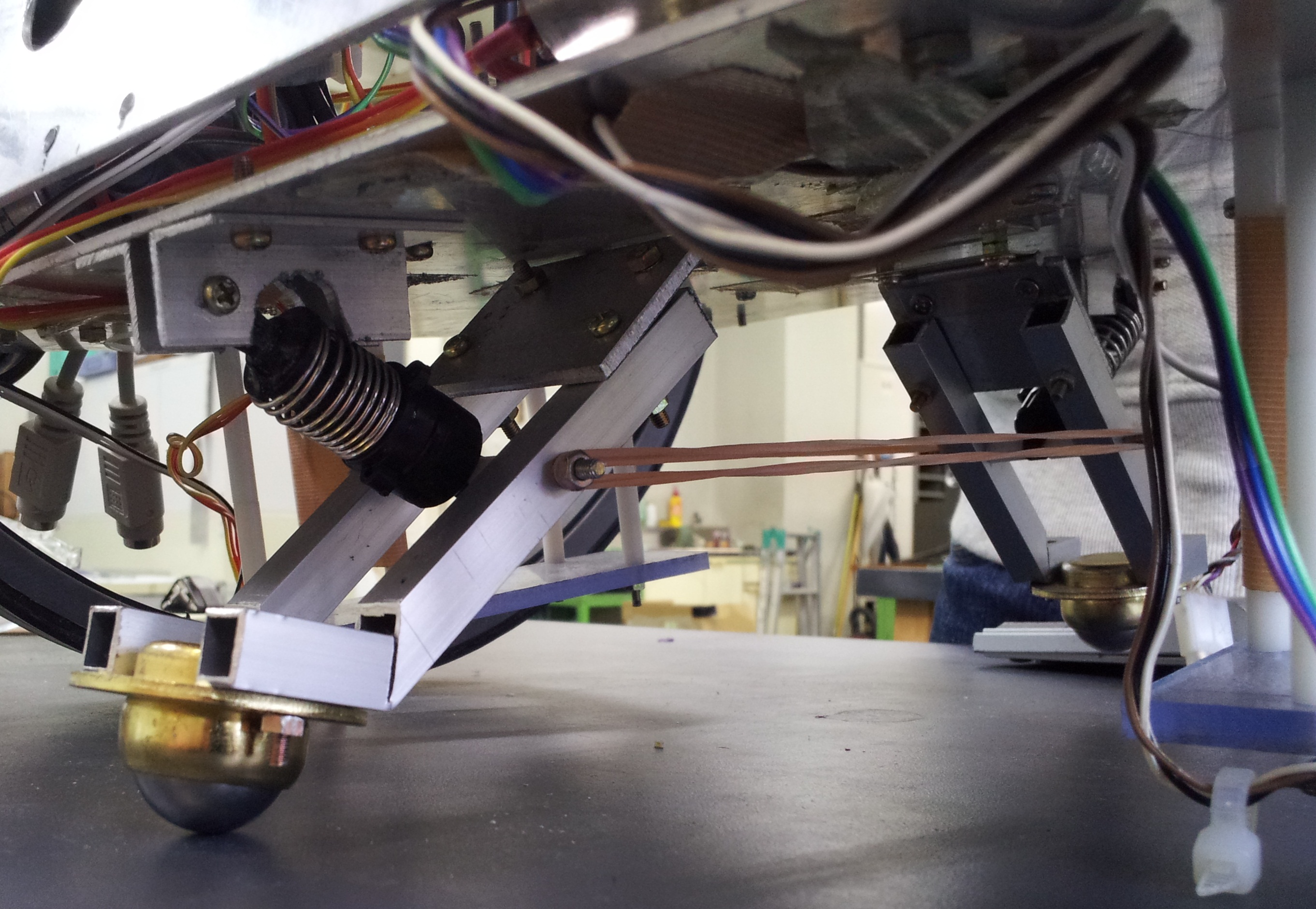
MIRS1102のMIRSが使用するサスペンションの機構は、MIRS1001のサスペンションを採用する。但し、寸法はMIRS1102に合うように変更する。
下に示すのは、MIRS1001のサスペンションの写真である。

|
|
|
図1 バネが伸びた状態(通常走行時)
|
図2 バネが縮んだ状態(シーソー乗り上げ時)
|
4.コース攻略方針
-
前で述べたとおり、我々のMIRS1102の開発コンセプトは、「よりシンプルに、より確実に」である。
ハードウェアではできる限り標準部品を用い、ソフトウェアは標準プログラムよりもより確実なプログラムを製作する。
5. 関連文書
沼津工業高等専門学校 電子制御工学科