 |
Fig.1 arm回路 |
| 沼津高専 電子制御工学科 | ||||||
| ||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2007.11.29 | 池田・宮川 | 池田 | 初版 | ||
| A02 | 2008.2.15 | 池田・宮川 | 池田 | 各所の修正 | ||
1 FPGAの変更点
2 arm回路
3 アドレスデコーダの変更
4 各センサのPIN割り当て変更
5 USSの入出力変更
標準機のFPGA回路データを基に以下の変更を加える。
・ arm回路の作成
・ アドレスデコーダの変更
・ 各センサのPIN割り当て変更
・ USSの入出力変更
PIN割り当ての変更表はエレクトロニクス詳細設計書に示す。
2 arm回路
2.1 arm回路の作成
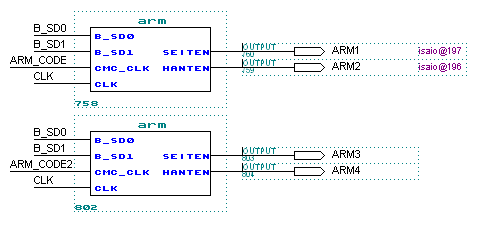
標準機の超音波センサ4送受信信号の196、197ピンをARM制御用信号の出力に変更。MIRSにはモーターを2つ使い、左右のアームをそれぞれ別の信号を送って制御する可能性があったため、arm回路は2つ作成しておいた。最終的にはモーターを並列接続し、信号は片方だけでよくなったため、arm回路の使用も片方になった。以下に回路図を示す。
|
Fig.1 arm回路 |
2.2 arm回路の内部
FPGAからの制御用信号により正転・反転・停止を行う回路である。以下に回路図を示す。
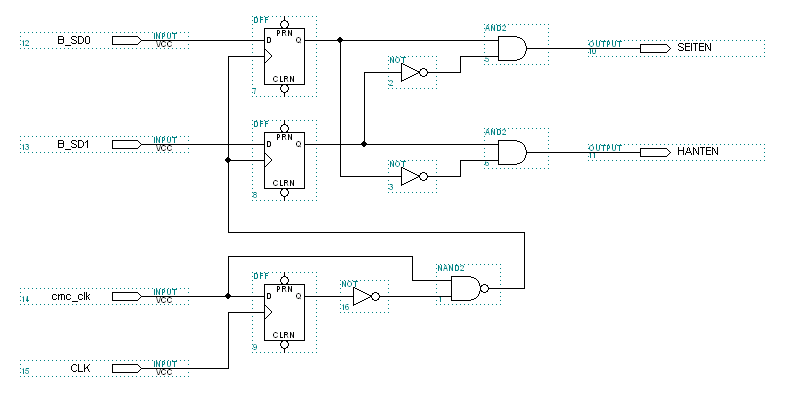 |
Fig.2 arm回路の内部 |
アドレスデコーダに0160(hex)を入力したときARM_CODEを指定、0170(hex)を入力したときARM_CODE2を指定。上で述べたとおりarm回路は片方しか使わなかったためARM_CODE2も使用しなかった。以下に回路図を示す。
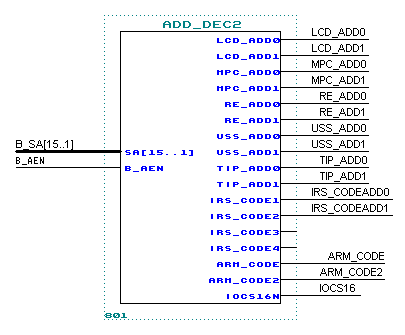 |
Fig.3 アドレスデコーダ |
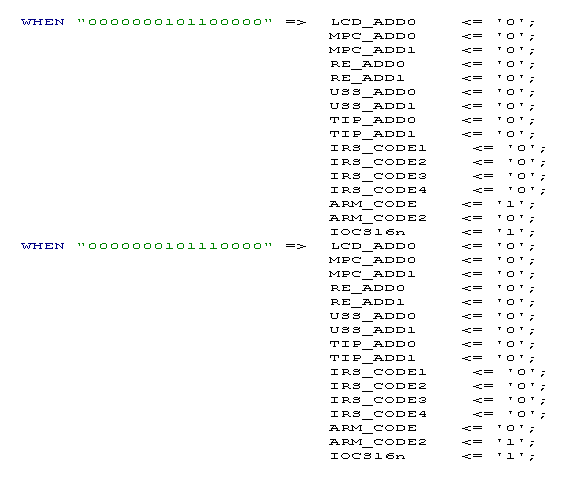 |
Fig.4 アドレスデコーダの一部 |
標準機の赤外線センサ信号1の160ピンを白線センサ信号5として変更、赤外線センサ信号2,3,4の161,162,163ピンをタッチセンサ信号5,6,7として変更。最終的にはタッチセンサは4つで足りたため、5,6,7は使用しなかった。5,6,7はタッチセンサのテストではうまく反応しなかったときがあり、ドーターボードにおいて元が赤外線センサの箇所のため、チャタリング除去回路が入っていなかった可能性がある。時間がなかったため試していないが、使用する場合はチャタリング除去回路を付け加えると良いかもしれない。 使用しない箇所はGNDを接続し、機能しないように変更した。以下に回路図を示す。
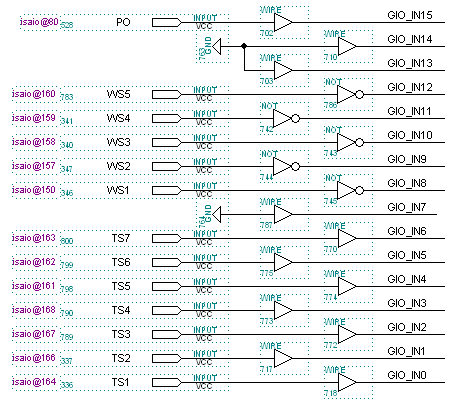 |
Fig.5 各センサのPIN割り当て |
標準機での超音波センサ4の入出力を削除した。以下に回路図を示す。
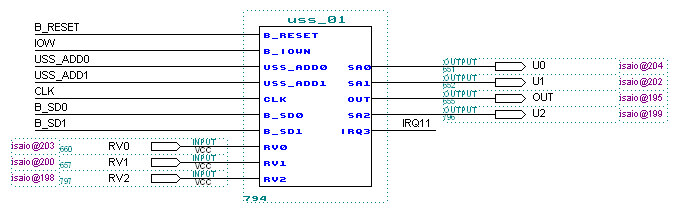 |
Fig.6 USS回路 |
| 関連文書 |