 |
Fig.1 裏側 |
| 沼津高専 電子制御工学科 | ||||||
| ||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2007.9.12 | 小澤(拓)・池田 田中・宮川 |
池田 | 初版 | ||
| A02 | 2007.9.18 | 小澤(拓) | 池田 | 4.1の抵抗の値、個数の訂正 | ||
| A03 | 2007.11.2 | 小澤(拓)・池田・宮川 | 池田 | 3.4〜3.6の訂正 | ||
| A04 | 2007.11.5 | 池田・田中 | 池田 | 3.3〜3.5の訂正 | ||
| A05 | 2007.11.26 | 小澤(拓)・池田 | 池田 | 2.4の追加 | ||
| A06 | 2008.1.18 | 池田 | 池田 | ドットマトリクス開発中止の文の追加 | ||
| A07 | 2008.2.15 | 池田・宮川 | 池田 | FPGAピン割り当ての修正 | ||
1 目的
2 概要
3 構成
4 部品一覧
注:ドットマトリクスは開発を中止した
この文書ではMIRS0701のエレクトロニクスに関する詳細設計を述べる。
2 概要
2.1 取り除いたもの
正面の赤外線センサ、側面の超音波センサ
2.2 追加したもの
白線センサ、ドットマトリクス、アーム制御ボード
2.3 ドットマトリクス
32x16ドットLEDマトリクス表示パーツセットを使い、LEDマトリクスによる表示を行う。
|
Fig.1 裏側 |
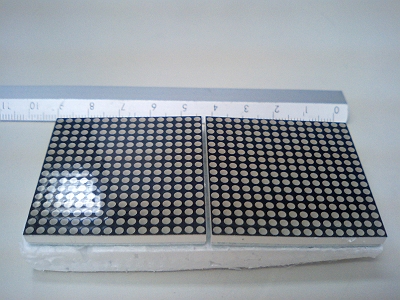 |
Fig.2 LEDマトリクス |
2.4 FPGAの変更
JK-FFを使用した出力回路をFPGA上に作成する。以下に回路図を示す。
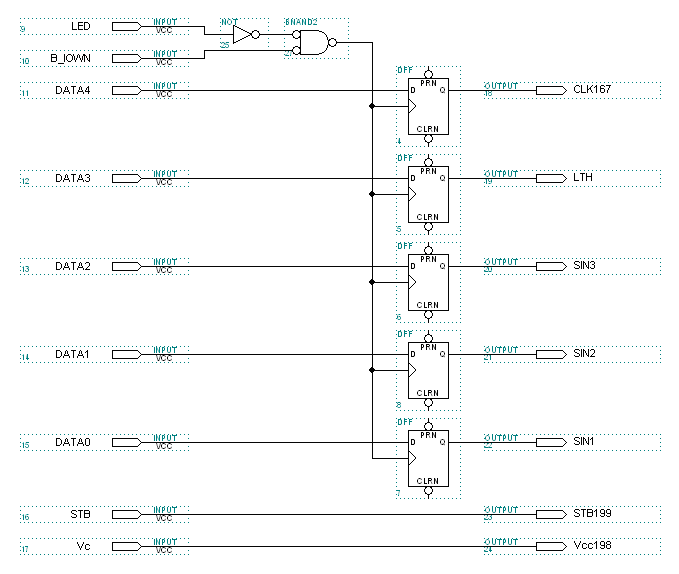 |
Fig.3 ドットマトリクス回路 |
3.1 標準機からの変更点
標準機に変更を加えた部分の構成図を以下に示す。
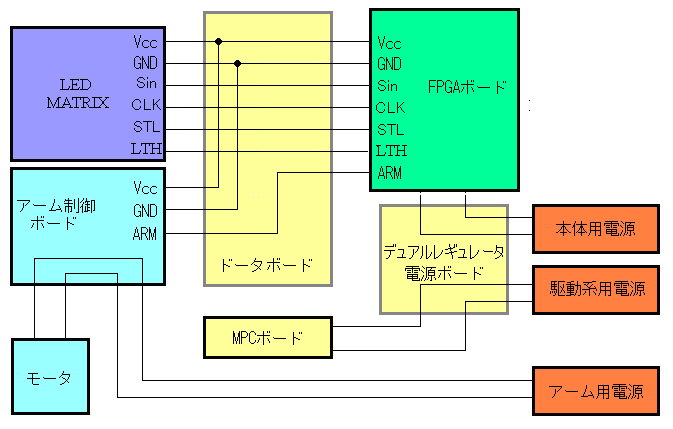 |
Fig.4 各ボードの概略ブロック図 |
3.2 ドータボード
標準機からの変更点は無い。
3.3 アーム制御ボードの概要(アーム用モータの動作)
ポスト識別によりFPGAから信号を受けた時のモータの動作を、以下のタイミングチャートに示す。
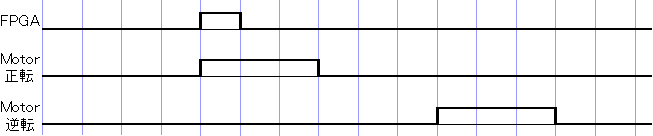 |
Fig.5 FPGAに対するMotorの動作のタイミングチャート |
3.4 FPGAピン割り当て
変更部分は文字色を変えて表記する。
項番 | ピン番号 |
名称 | IN/OUT | 機能 |
1 | 144 | RE_XB | IN | ロータリエンコーダX_B相 |
2 | 147 | RE_XA | IN | ロータリエンコーダX_A相 |
3 | 148 | RE_YB | IN | ロータリエンコーダY_B相 |
4 | 149 | RE_YA | IN | ロータリエンコーダY_A相 |
5 | 150 | WLS1 | IN | 白線センサ信号1 |
6 | 157 | WLS2 | IN | 白線センサ信号2 |
7 | 158 | WLS3 | IN | 白線センサ信号3 |
8 | 159 | WLS4 | IN | 白線センサ信号4 |
9 | 160 | WLS5 | IN | 白線センサ信号5 |
10 | 161 | TS5 | IN | タッチセンサ信号5 |
11 | 162 | TS6 | IN | タッチセンサ信号6 |
12 | 163 | TS7 | IN | タッチセンサ信号7 |
13 | 164 | TS1 | IN | タッチセンサ信号1 |
14 | 166 | TS2 | IN | タッチセンサ信号2 |
15 | 167 | TS3 | IN | タッチセンサ信号3 |
16 | 168 | TS4 | IN | タッチセンサ信号4 |
17 | 169 | MR1 | OUT | 右モータPWM1 |
18 | 170 | MR2 | OUT | 右モータPWM2 |
19 | 172 | ML1 | OUT | 左モータPWM1 |
20 | 173 | ML2 | OUT | 左モータPWM2 |
21 | 204 | UT1 | OUT | 超音波センサ1送信信号 |
22 | 203 | UR1 | IN | 超音波センサ1受信信号 |
23 | 202 | UT2 | OUT | 超音波センサ2送信信号 |
24 | 200 | UR2 | IN | 超音波センサ2受信信号 |
25 | 199 | UT3 | OUT | 超音波センサ3送信信号 |
26 | 198 | UR3 | IN | 超音波センサ3受信信号 |
27 | 197 | ARM1 | OUT | ARM制御用信号1 |
28 | 196 | ARM2 | OUT | ARM制御用信号2 |
29 | 195 | UTIM | OUT | 超音波センサ受信ガードタイミング |
30 | 193 | LCD_RS | OUT | LCD Register Select |
31 | 192 | LCD_RW | OUT | LCD Read/Write |
32 | 191 | LCD_E | OUT | LCD Enable |
33 | 190 | LCD_DB0 | IN/OUT | LCD Data 0 |
| 33 | 189 | LCD_DB1 | IN/OUT | LCD Data 1 |
| 33 | 187 | LCD_DB2 | IN/OUT | LCD Data 2 |
| 33 | 179 | LCD_DB3 | IN/OUT | LCD Data 3 |
| 33 | 177 | LCD_DB4 | IN/OUT | LCD Data 4 |
| 33 | 176 | LCD_DB5 | IN/OUT | LCD Data 5 |
| 33 | 175 | LCD_DB6 | IN/OUT | LCD Data 6 |
| 33 | 174 | LCD_DB7 | IN/OUT | LCD Data 7 |
| 34 | XXX | ISAバス信号 | マイコンビルダーのマニュアル参照 | |
3.5 ソフトウェアビジビリティ
IOポート仕様を以下に示す。
| 名称 | IO port Address [hex] | R/W | Port Name | 機能 | ||||||||||||||||||||||||||||||||
| 汎用入力 | 0140 | R | GIO | デジタル入力 1.MP:モータ用電源のON/OFF 2.WLS:白線センサ1-5 3.TS1-5:タッチセンサ1-5
|
||||||||||||||||||||||||||||||||
| ARM制御信号 | 0160 | W | ARM_Ctrl | ・ARMを制御する2bit信号 アーム用モータの回転を制御しアームを出し引きさせる。
|
||||||||||||||||||||||||||||||||
| ドットマトリクス制御信号 | 0170 | W | LED | ・ドットマトリクス出力用の4bit信号 LEDの点灯を行う。
|
||||||||||||||||||||||||||||||||
3.6 ドットマトリクス
32x16ドットLEDマトリクスを中心に仲介用回路を介してFPGAボードからの命令で動作するLEDマトリクスを作成する。
FPGAのPINを8つ使用する。ソフトウェアビジビリティを以下に示す。
| FPGA PIN | IC PIN | 名称 | 役割 | 備考 |
| --- | A1 | LED_PWR | LED電源 | AB共につなぐ必要あり |
| --- | B1 | LED_PWR | LED電源 | |
| 161 | A2 | SIN1 | シグナル | |
| 162 | A3 | SIN2 | シグナル | |
| 163 | A4 | SIN3 | シグナル | |
| 199 | A5 | CLOCK | クロック | |
| 198 | A6 | LATCH | 点灯 | |
| 197 | A7 | STOROBO | ストロボ | 輝度の調整 |
| --- | A8 | IC_PWR | IC電源 |
4.1 ドットマトリクス
| 名称 | 数 | 備考 |
| 32x16ドットLEDマトリクス表示装置パーツセット | 1 | 秋月電子でセットで購入 |
| 1.8kΩ抵抗 | 1 | R4(付属なし) |
| 1kΩ抵抗 | 1 | R5(付属なし) |
| 部品番号 | 数 | 部品名 | 備考・表示等 |
| IC1,2 | 2* | TB62706 | |
| IC3,4 | 2* | TB62783 | |
| IC5,6 | 2* | 74HC595 | |
| IC7 | 1* | 74HC04 | |
| C1 | 1* | 10μF積層セラミックコンデンサ | |
| C2,3,4,5 | 4* | 0.1μF積層セラミックコンデンサ | |
| R1 | 1 | 75Ω チップ抵抗 | |
| R2,3 | 2 | ジャンパー | 部品は入っていません |
| R4,5 | 2 | 390Ω 1/4Wカーボン抵抗 | 橙白茶金 |
| LED1,2 | 2 | C-2AAOSRDT | 16x16ドット 赤色発光 |
| CN1A,B | 4 | ピンヘッダ 5x2 | 5x2に切って使用 |
| CH2A,B | 4 | ピンソケット 5x2 |
| 名称 | 数 | 備考 |
| 10ピンソケット | 2 | 二つ必要 |
| 3Pinコネクタ | 2 | 3-3-2 で 8Pin必要 |
| 2Pinコネクタ | 1 |
| 関連文書 |