 |
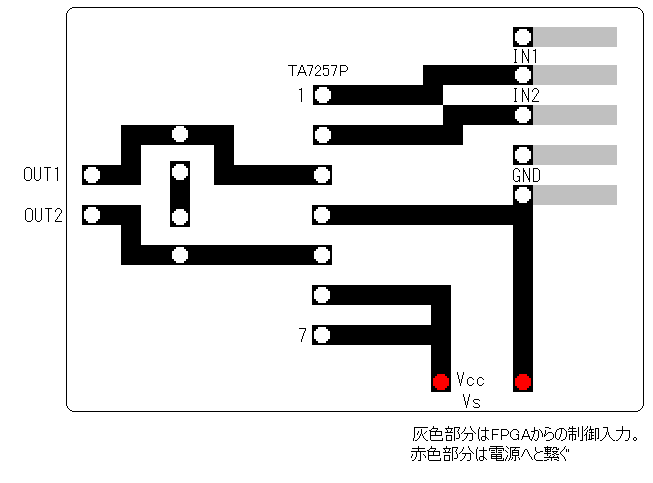
Fig.1 回路概観図 |
| 沼津高専 電子制御工学科 | ||||||
| ||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2007.10.19 | 池田・田中 | 池田 | 初版 | ||
| A02 | 2008.2.15 | 池田・田中 | 池田 | 図の訂正 | ||
1 目的
2 ボードの仕様
3 TA7257Pの仕様
4 回路概観図
この文書は、MIRS0701で使用するアーム制御ボードの製造手順を記載したものである。
2 ボードの仕様
このボードは、ポスト獲得の際に用いるアームに対し、電源の供給および正転・逆転・停止の制御を行う為のボードである。仕様を以下に示す。
以下に部品表を示す。
品名 | 規格 | 数量 | 備考 |
| PCB片面基板 | 1 | ||
| モータドライバIC | TA7257P | 1 | |
| 単三電池 | 1.5V | 4 | |
| 2ピンコネクタ | 1 | モータ用 | |
| 5ピンコネクタ | 1 | FPGA制御入力用 |
東芝製DCモータコントロール用IC、7PINである。各ピンの役割は以下の通りである。
PIN番号 | 名称 | 役割 |
1 | IN1 | FPGAからの制御入力 |
2 | IN2 | FPGAからの制御入力 |
3 | OUT1 | モータへの出力 |
4 | GND | |
5 | OUT2 | モータへの出力 |
6 | VS | モータ用電源 |
7 | VCC | IC用電源 |
IN1 | IN2 | OUT1 | OUT2 | 動作 |
0 | 0 | High Impedance | High Impedance | Stop |
0 | 1 | Low Impedance | High Impedance | 正転 |
1 | 0 | High Impedance | Low Impedance | 逆転 |
1 | 1 | Low Impedance | Low Impedance | Brake |
以下に回路概観図を示す。
|
Fig.1 回路概観図 |
| 関連文書 |