|
沼津高専 電子制御工学科 |
||||||
|
||||||
|
改訂記録 |
||||||
|
版数 |
作成日 |
作成者 |
承認 |
改訂内容 |
||
|
A01 |
2004.9.10 |
飯田、内田 |
前田 |
初版 |
||
|
A02 |
2004.10.12 |
飯田、内田 |
前田 |
諸不備の改訂 |
||
|
A03 |
2004.11.25 |
飯田、内田 |
前田 |
諸不備の改訂その2 |
||
目次
1. はじめに
本ドキュメントは、MIRS0402のシステム製造仕様書の作成に必要な事項を述べる。
2. 概要
外形は上部から見た時に8角形で、前方向1ヶ所と後方1ケ所にタッチセンサを設置。バンパは蝶番で設置。
外観上の特筆すべき変更点はアームの使用したことである。
2. センサ系
超音波センサを計4個使用。 タッチセンサは前面に1個、後方に1個、アームの制御の為に3個設置(アーム飛び出し防止、アーム戻りすぎ防止、アーム先端)で計5個使用。
第3階層の左側面のみに赤外線センサを設置し計1個使用。 MIRS底面に白線センサを4個設置する。 3.
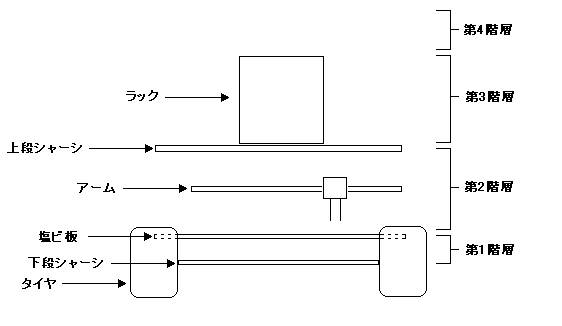
電源系・駆動系 ラックとピニオンを用いた機構で、モーターの回転によってラックに取り付けられたバンパーでポストを獲得する。 また、モーター制御に可逆転モータドライバを使用している。(詳しくは、エレクトロニクス詳細設計書参照) 階層図 1. シャーシフレーム MIRS0402は第一階層、第二階層、第三階層、第四階層、ISAラックの5つのユニットから構成される。各ユニットの構成要素を以下に述べる。
1.
第一階層 2.
第二階層
3.
第三階層 4.
第四階層・ISAラック 2. アーム機構
標準機と同じ
3. 外観
標準機に同じ。
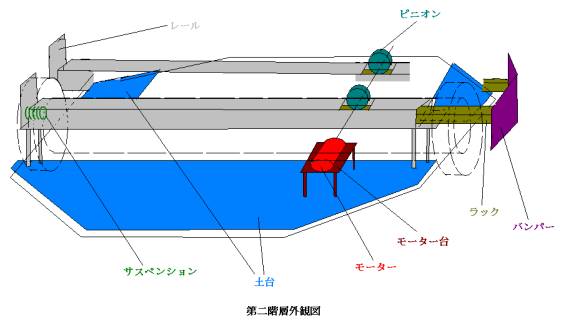
第二階層は第一階層上部に位置し、 加工不可能な第一階層に替わって、様々な取り付け(主にアーム機構の設置)を行うための階層。
素材はプラ板(厚さ3mm)、アームの機構設置の為に必要な箇所に適宜設置される。
詳しくは第2階層製造仕様書を参照してください。
第三階層は第二階層の上部に位置し、超音波センサ、赤外線センサ等、主にセンサ類が搭載される他、メインスイッチや、後方にはバッテリーも搭載する。
標準機と同じ。
未定
o MIRS0402基本設計書
o MIRS0402エレクトロニクス詳細設計書
o MIRS0402ソフトウェア詳細設計書