3.2. 動作モードの定義
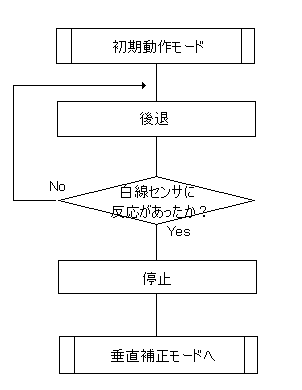
- 初期動作モード
スタート位置から後退する。
白線を感知したら『垂直補正モード』に移る。
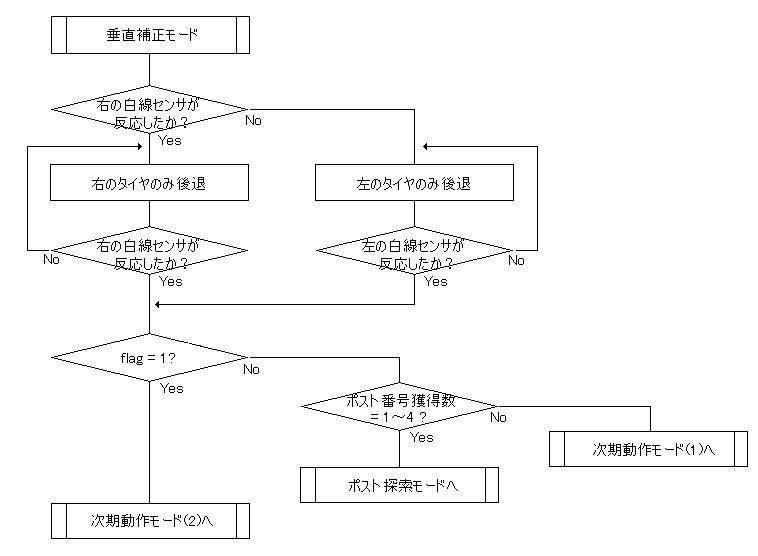
- 垂直補正モード
いったん停止し、MIRSが白線と垂直になるように補正を行う。
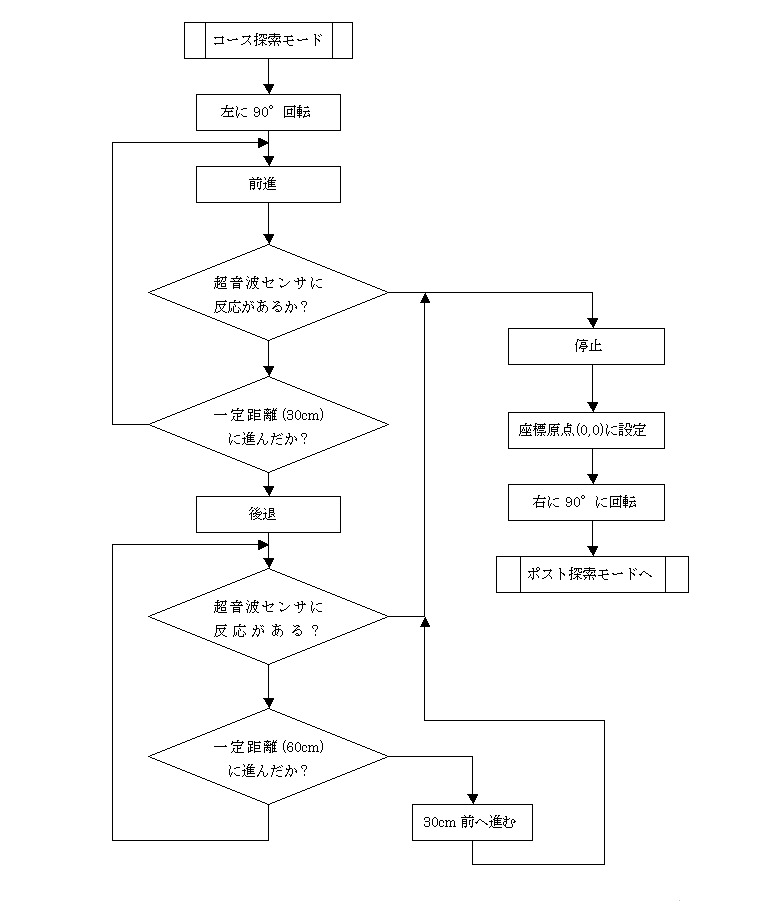
- コース探索モード
その場で左に90°回転し、前後しながら右側の超音波センサで進行方向にポストがないルートを探す。
位置が決まったら右に90°回転し、その方向をMIRSの進む方向とし、
『ポスト探索モード』に移る。
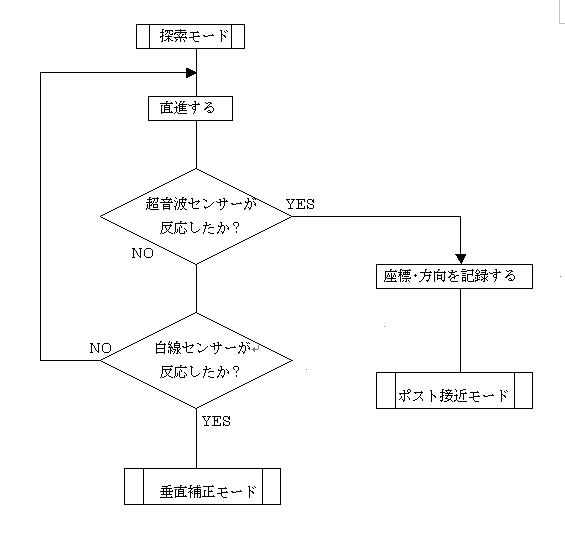
- ポスト探索モード
直進しながら左右の超音波センサでポストの探索を行う。
超音波センサに反応があった場合は、"何個目のポストか"、"左右どちらにポストがあったか"を記憶したあと、『ポスト接近モード』に移る。
競技場端まで到達した場合(=白線を感知した場合)は『垂直補正モード』に移る。
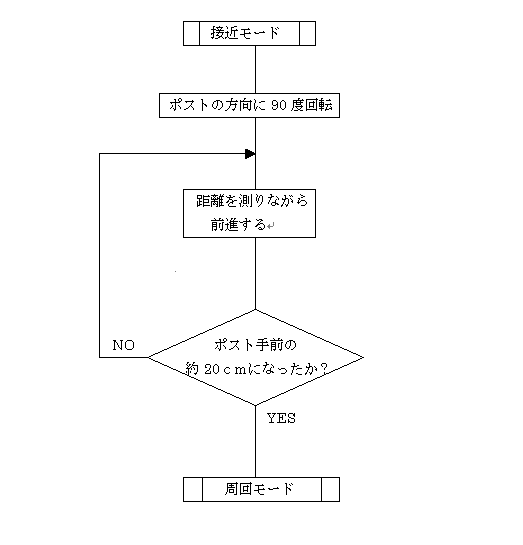
- ポスト接近モード
反応があった超音波センサの方向に90°回転、
前方の超音波センサでポストとの距離を測りながら前進していく。
ポストの約10[cm]手前で停止し、『ポスト周回モード』に移る。
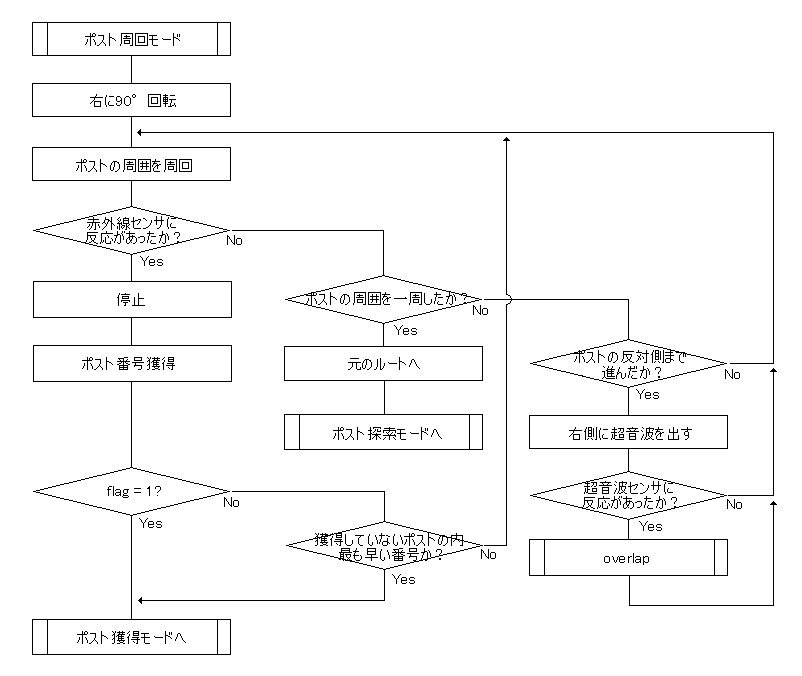
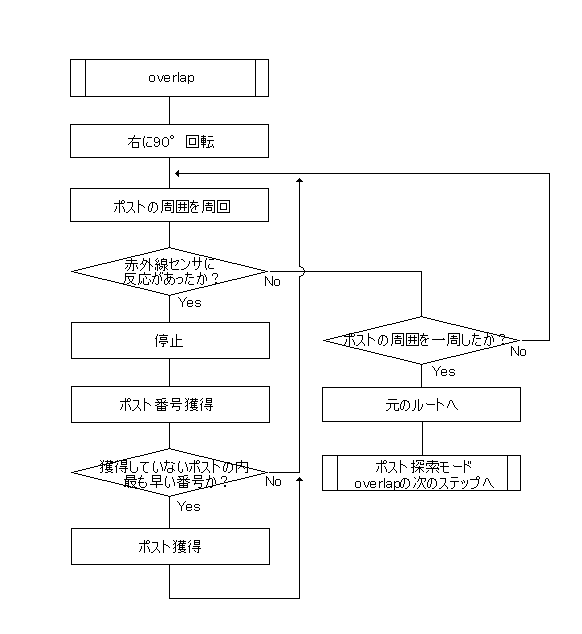
- ポスト周回モード
右に90°回転し、ポストを周回する。
左側の赤外線センサが反応したら停止し、赤外線の周波数からポストの番号を確認する。
ポスト番号が、指定されたポスト番号ならポストを獲得する。
アームを用いてポストを獲得する。
この時、アームを出しすぎたり、戻しすぎたりしないようタッチセンサを用いてアームの動作を制御する。
アームを限界まで伸ばすか、アーム先端のタッチセンサが反応したらアームを戻し、赤外線センサでポスト獲得の確認を行う。
ポスト番号が、指定されたポスト番号以外ならポストの情報を記憶し、周回した後 元のルートへ戻る。
その場合は『ポスト探索モード』へ戻る。
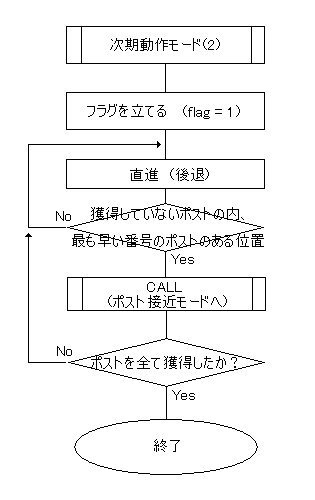
- 正規獲得動作モード
獲得したポストの情報を元に番号順にポストを獲得していく。
その時の手順は以下のとおり①獲得していないポストの内、最も早い番号のポストのある位置(Y座標)まで直進
②ポストの方向に90°回転
③ポストとの距離が10[cm]になるまでポストに接近
④右に90°回転
⑤赤外線センサに反応があるまでポストの周囲を周回
⑥アームを用いてポストを獲得
⑦元の座標まで戻る
- 回避モード
本来何もないはずの場所で障害物にぶつかった場合、
障害物を避けて進む。
- 試験モード
動作確認のため各モードを単独で実行する。
3.3. モード遷移表
| 遷移前\遷移後 | 初期動作 モード |
垂直補正 モード |
コース探索 モード |
ポスト探索 モード |
ポスト接近 モード |
ポスト周回 モード |
正規獲得 モード |
回避 モード |
試験 モード |
| 初期動作モード | - | 白線を感知 | × | × | × | × | × | × | × |
| 垂直補正モード | × | - | 初期動作モードから遷移してきた | ポスト探索モードから遷移してきた | × | × | 試技2回目or試技1回目のポスト探索終了時 | × | × |
| コース探索モード | × | × | - | モード終了 | × | × | × | × | × |
| ポスト探索モード | × | 白線を感知 | × | - | ポストを発見 | × | × | ※2 | × |
| ポスト接近モード | × | × | × | × | - | モード終了 | × | ※2 | × |
| ポスト周回モード | × | × | × | モード終了 | × | - | × | × | × |
| 正規獲得モード | × | 全てのポストを 獲得する前に 競技場端に到達 |
× | × | × | × | - | ※2 | × |
| 回避モード | × | × | × | ※3 | × | × | ※3 | - | × |
| 試験モード | × | × | × | × | × | × | × | × | - |
※3 … 障害物回避後、以降前のモードに戻る
3.4. アルゴリズム (フローチャート)
3.4.2 垂直補正モードのアルゴリズム
3.4.3 コース探索モードのアルゴリズム
3.4.4 ポスト探索モードのアルゴリズム
3.4.5 ポスト接近モードのアルゴリズム
3.4.6 ポスト周回モードのアルゴリズム
3.4.7 正規獲得モードのアルゴリズム
| 関連ドキュメント | ||
|---|---|---|
| ドキュメント番号 | ドキュメント名称 | 作成責任者 |
| MIRS0402-DSGN-0001 | MIRS0402 システム提案書 | 野村 |