図1に概略ブロック図を示す。
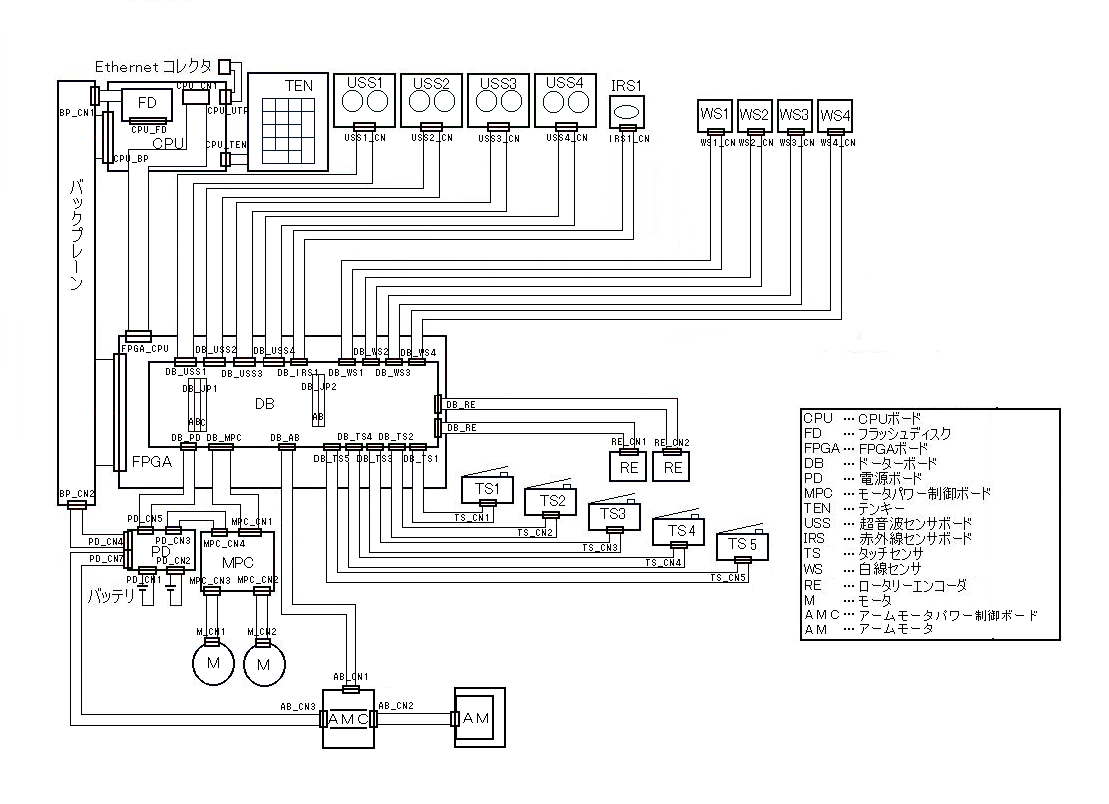
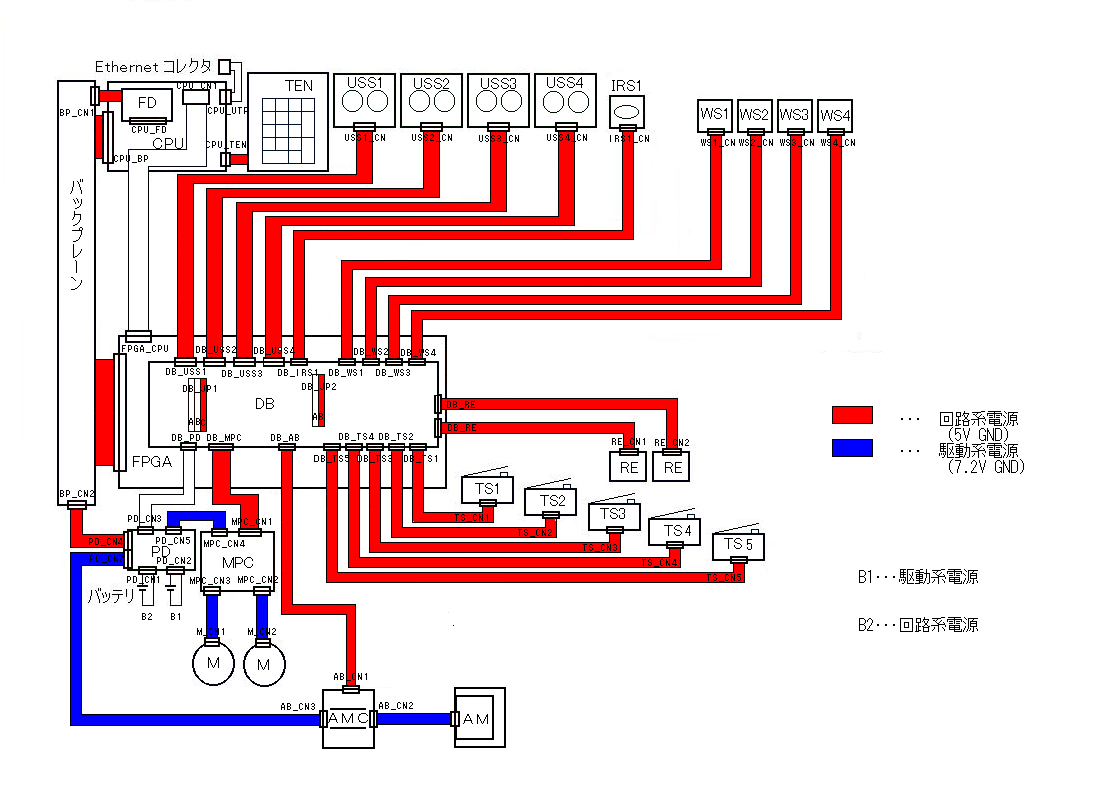
図3に電源系統図を示す。
| 沼津工業高等専門学校 電子制御工学科 | ||||||
|
||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 |
||
| A01 | 2004.09.14 | 野村、渡邊、前田 | 前田 | 初版 | ||
| A02 | 2004.11.25 | 野村、渡邊、前田 | 前田 | ソフトウェアビジビリティの変更(I/O port address, ピン番号etc.) 製造仕様書をリンクして、作成ボードに関する記述を省略した |
||
| A03 | 2004.12.27 | 野村、渡邊、前田 | 前田 | ソフトウェアビジビリティの変更(I/O port address, ピン番号etc.) IOボードの各機能を省略した。 ドータボードのピン割り当て図を変更した。 |
||
| A04 | 2004.2.10 | 野村、渡邊、前田 | 前田 | FPGA回路データの添付 | ||
| 名称 | IO port Address[hex] | R/W | Port Name | 機能 | |||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PWM 信号生成 |
0110 | W | PWM 0 | PWM出力0信号制御
|
|||||||||||||||||||||||||||||||||||||||||||||
| 0112 | W | PWM 1 | PWM出力1信号制御
|
||||||||||||||||||||||||||||||||||||||||||||||
| Rotary Encoder |
0120 | R/W | RE_X | ロータリエンコーダXの制御 書き込み:0x01を書き込むことでカウント値がリセットされる。 読み込み:16bitのカウンタデータが読み込まれる。リセットされない限りカ ウント値は積算される。順回転で加算され、逆回転で減算される。回転方向の 順、逆はロータリエンコーダの2相のパルスにより判別され、AがBより進んで いるとき順回転となる。負の値は2の補数表現であらわされる。
|
|||||||||||||||||||||||||||||||||||||||||||||
| 0122 | R/W | RE_Y | ロータリエンコーダYの制御 Xと同様 |
||||||||||||||||||||||||||||||||||||||||||||||
| 超音波 センサ |
0130 | W | USS_Send | 超音波信号の送信 このアドレスに書き込むことにより、下位2bitで示される超音波センサ送信器に40KHzの超音波を0.4ms間送信する。
|
|||||||||||||||||||||||||||||||||||||||||||||
| 0132 | W | USS_Ctl | 超音波受信信号割り込みの制御 このアドレスに書き込むことにより、受信信号による割り込みのマスク、リ セットを行う。bit1に1を書き込とマスク、0でアンマスク。bit0に1を書き 込むとリセット。
|
||||||||||||||||||||||||||||||||||||||||||||||
| 汎用 入力 |
0140 | R | GIO | デジタル入力 4種類の入力信号をこのポートから読み込む。
|
|||||||||||||||||||||||||||||||||||||||||||||
| AMC 制御信号 | 0160 | W | AM_Ctl | アームモータを制御する2bit信号 アーム用モータの回転を制御しアームを出し引きさせる。
|
|||||||||||||||||||||||||||||||||||||||||||||
| IRQ番号 | 信号名称 | 機能 |
|---|---|---|
| 5 | USS_int | 超音波検出の立ち上が りでsetされ、USS_Ctlに0x01を書き込むとリセットされる。 |
** PIN/LOCATION/CHIP ASSIGNMENTS **
Actual
User Assignments
Assignments (if different) Node Name 機能
isaio@176 AMC_M0 アームモータ
isaio@177 AMC_M1
isaio@160 IRS1 赤外線センサー
isaio@161 IRS2
isaio@162 IRS3
isaio@163 IRS4
isaio@172 L_DIR 左モータ
isaio@173 L_PWM
isaio@195 OUT 超音波センサ受信ガードタイミング
isaio@169 R_DIR 右モータ
isaio@170 R_PWM
isaio@203 RV0 超音波センサ受信信号
isaio@200 RV1
isaio@198 RV2
isaio@196 RV3
isaio@164 TS1 タッチセンサー
isaio@166 TS2
isaio@167 TS3
isaio@168 TS4
isaio@174 TS5_1
isaio@175 TS5_2 FPGA回路でラッチする
(ラッチ用ICを使用しない)
isaio@204 U0 超音波センサ送信信号
isaio@202 U1
isaio@199 U2
isaio@197 U3
isaio@150 WS1 白線センサー
isaio@157 WS2
isaio@158 WS3
isaio@159 WS4
isaio@147 X_A ロータリーエンコーダー
isaio@144 X_B
isaio@149 Y_A
isaio@148 Y_B