|
沼津高専 電子制御工学科 |
||||||
|
||||||
|
改訂記録 |
||||||
|
版数 |
作成日 |
作成者 |
承認 |
改訂内容 |
||
|
A01 |
2004.10.08 |
飯田、内田 |
前田 |
初版 |
||
|
A02 |
2004.12.27 |
飯田、内田 |
前田 |
CN1コネクタを4pinに変更(動作原理に変更はない) それに伴うパターン図・コネクタ等の記述の改訂 |
||
|
A03 |
2005.1.25 |
飯田、内田 |
前田 |
CN1コネクタの変更、回路図の変更 |
||
|
A04 |
2005.2.10 |
飯田、内田 |
前田 |
CN1コネクタの変更、回路図の変更 |
||
1. 目的
この仕様書は、MIRS0402のアーム用モータ制御ボードの製造手順、及び動作試験方法を
記載したものである。
2.このボードについて
このボードは、ポスト獲得用のアームの動力となるモータの回転の制御、
モータへの電源の供給を行うためのものである。
3. 製造手順
(ア) PCBに部品をのせ、はんだ付けをする。
1-1.
部品、必要器具
PCB、はんだごて、はんだ、はんだ吸取り線、回路部品
1-2手順
部品表と実装図を見ながら、背の低い部品から順番に基板に取りつけ、はんだ付けをしていく。
(イ) 基板の試験を行う
2-1.部品、必要器具
基板、テスター、はんだごて、はんだ、はんだ吸い取り器、
電源ボード、ケーブル、バッテリー、AMCボード、アーム用モータ
可逆転モータドライバ
2-2.手順
1. このページの4.導通チェック,5. 動作試験の内容にそって基板の試験を行う。
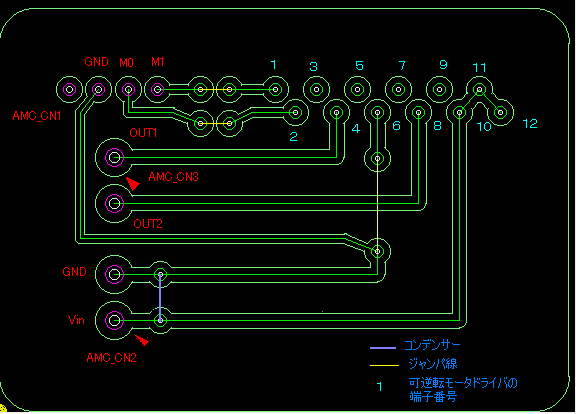
実装図
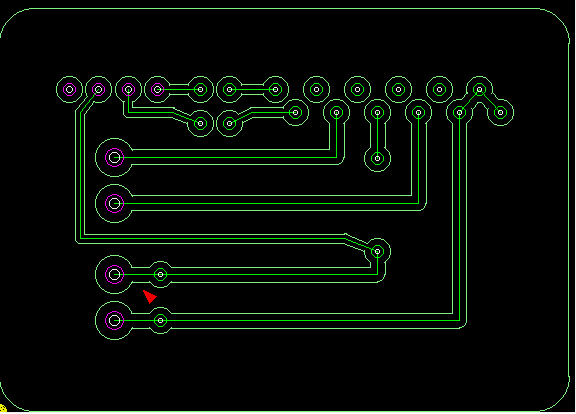
パターン図(amc.png)
{kind=link}
回路図 (AMCB-AM.CE2)
|
番号 |
品名 |
商品名 |
数量 |
単位 |
備考 |
|
|
C1 |
電解コンデンサ |
10μF |
1 |
個 |
|
|
|
C2 |
セラミックコンデンサ |
0.1μF/25V |
1 |
個 |
モータに直にはんだ付けする |
|
|
IC1 |
可逆転モータドライバ |
TA8429H(東芝) |
1 |
個 |
||
|
CN1 |
モータ制御用コネクタ |
MOLEX 5046-04A |
1 |
個 |
4pin |
|
|
CN2, CN3 |
電源用コネクタ |
MOLEX 53259-0220 |
2 |
個 |
2pin |
|
※可逆転モータドライバについて
制御回路、4ヶの大電流用トランジスタ、そして保護回路が入っており、
4ヶのトランジスタはブリッジ型になっていて、負荷へ流れる電流のON/OFFと方向切り替えが行える。
入出力端子は、千鳥配列で12ピンある。
|
端子番号 |
端子名 |
機能 |
|
1 |
IN1 |
出力を制御する入力端子 |
|
2 |
IN2 |
|
|
3 |
NC |
未使用端子 |
|
4 |
OUT1 |
このICの出力端子 |
|
5 |
NC |
未使用端子です。 |
|
6 |
GND |
GNDです。 |
|
7 |
NC |
未使用端子です。 |
|
8 |
OUT2 |
このICの出力端子 |
|
9 |
NC |
未使用端子です。 |
|
10 |
Vc |
出力部へ電源を供給する端子です。 |
|
11 |
Vcc |
制御回路へ電源を供給する端子です。 |
|
12 |
ST |
出力をON/OFFする制御入力端子です。 |
つまり、IN1、IN2、STの3つの制御入力端子で、OUT1とOUT2の間に繋げた負荷を制御する。
制御入力端子は、VccやVsの電圧に関わらず、0.8V以下で'L'、2.0V以上で'H'と認識する。
つまり、5Vや3Vで動作するマイコンと、直接インターフェースできる。
制御入力と出力との関係は、下表のようになる。
|
入力 |
出力 |
出力 |
状態 |
|||
|
IN1 |
IN2 |
ST |
OUT1 |
OUT2 |
||
|
H |
H |
H |
GND |
GND |
ブレーキ |
OUT1とOUT2の両方がGNDへ接続されるので、負荷の両端子がショートされた状態になる |
|
L |
H |
H |
GND |
Vs |
逆転 |
OUT2端子からOUT1端子へ、電流が流れる |
|
H |
L |
H |
Vs |
GND |
正転 |
OUT1端子からOUT2端子へ、電流が流れる |
|
L |
L |
H |
OFF |
OFF |
停止 |
OUT1とOUT2の両方がOFF(VsにもGNDにも繋がってない)になる |
|
X |
X |
L |
OFF |
OFF |
スタンバイ |
停止と同様だが、IC内の制御回路の動作が停止する。 |
※コネクタについて
· コネクタ名称 : AMC_CN1(MOLEX 5045-04A)
図. コネクタ形状
表. インターフェース
|
ピン.No |
信号名 |
I/O |
備考 |
|
1 |
AMC_M0 |
IN |
アームモータ制御信号 |
|
2 |
AMC_M1 |
IN |
アームモータ制御信号 |
|
3 |
GND |
- |
GND |
|
4 |
Vcc |
- |
+5V(使用しない) |
用途
FPGA回路からの信号を、ドータボードより受けるコネクタ。
· コネクタ名称 : AMC_CN2, AMC_CN3(MOLEX 5274)
図. コネクタ形状
表. インターフェース
|
ピン.No |
信号名 |
I/O |
備考 |
|
1 |
Vin |
- |
+7.2V |
|
2 |
GND |
- |
GND |
用途
CN2 :
アームモータへAMCボードを介して電源を供給するケーブルのコネクタ。
CN3 : 電源ボードから供給される電源をAMCボードへ送るコネクタ。
- 用意するもの
基板、テスター、はんだごて、はんだ、はんだ吸い取り器 - 導通チェック
回路図を見て、各部品につながるべき線がつながっているかをテスターで調べる。なるべくはんだにテスターをあてず、部品の足にあてるようにすること。 - 非導通チェック
パターン間の非道通試験はすべてについて行うことが望ましいが、困難なので少なくとも電源とグランドが短絡していないことを確かめる。 - 修正
導通すべきところが導通してなかったら修正する。 - 電源とグランドが短絡していた場合、絶対に電源を供給してはならない。(電源を破壊する恐れがある。)
また、どこで短絡しているかを調べるのは非常に困難である。目視とテスターにより丹念に調べていくより方法がない。
- 用意するもの
電源ボード、ケーブル、バッテリー、AMCボード、アーム用モータ - 動作試験
- 電源ボード、バッテリー、AMCボード、モータを接続する。
- GNDとCN1の2ピン、GNDとCN1の3ピンを適当なケーブルで順に接続していく。この時モータが正、逆方向に回転することを確認する。
- 以上が確認できれば正常である。