
| 名称 | MIRS2404開発完了報告書 |
|---|---|
| 番号 | MIRS2404-REPT-0001 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2025.2.14 | 初版 |
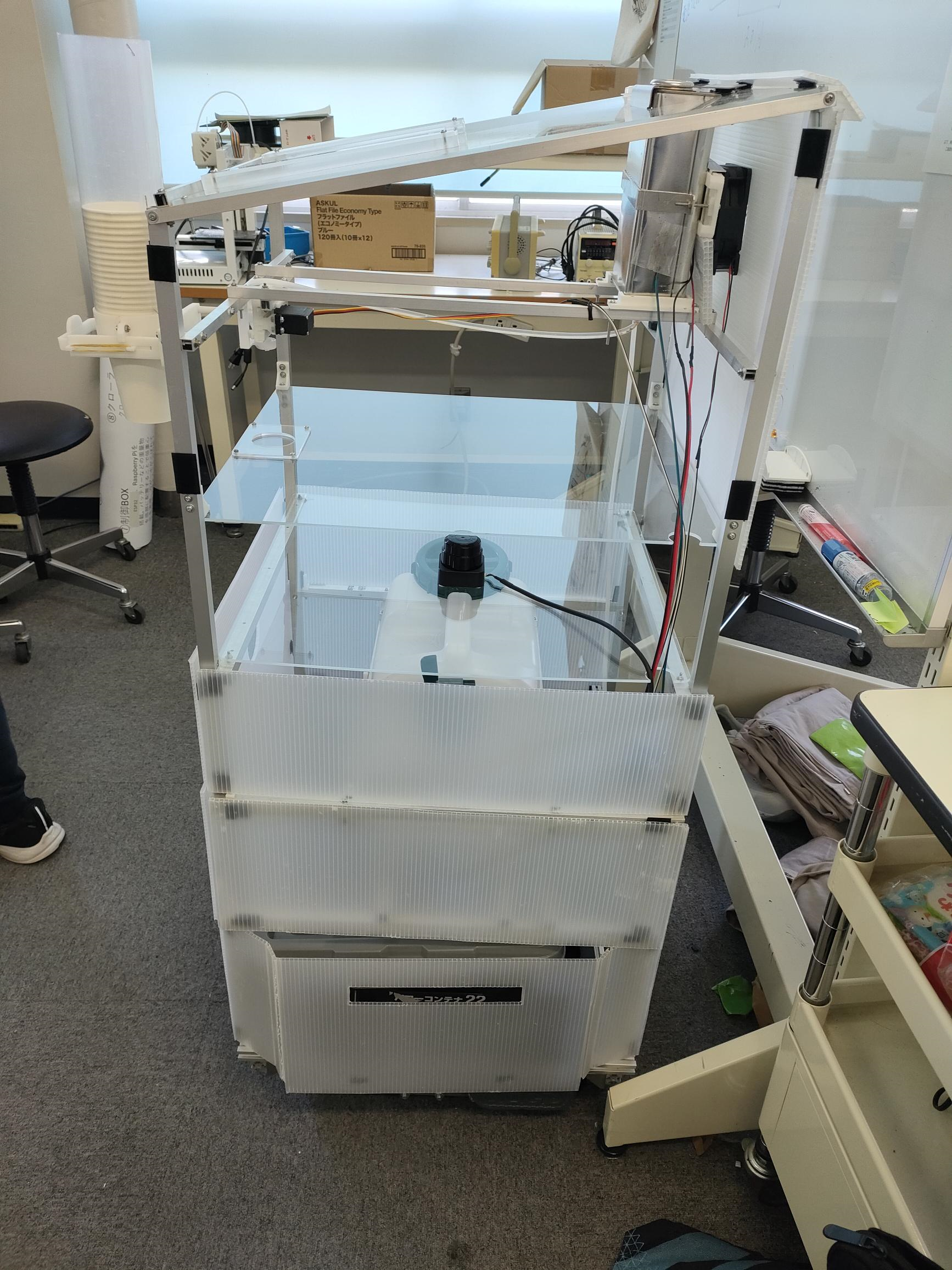
本ドキュメントはMIRS2404における開発完了報告書である。完成した機体を以下に示す。
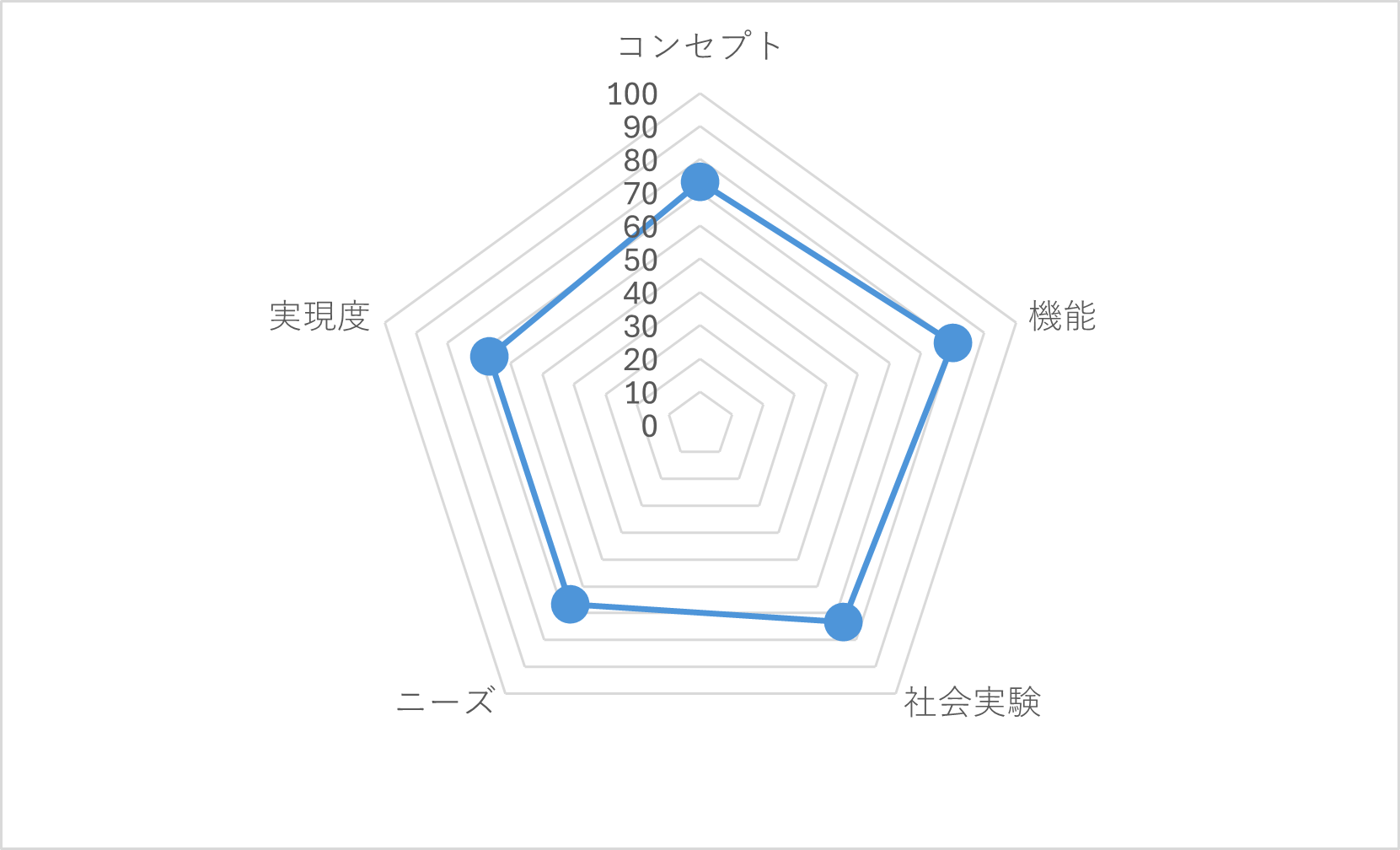
機体評価を以下に示す。システム統合確認会議で提示した6項目について評価を行った。
| 機能 | 機能概要 | 評価 |
|---|---|---|
| 校内移動 |
・Navigation2による自律移動 ・人、障害物の回避 ・停止後の自動再走行 |
実装出来ているが、ESPのリセット必須 |
| 水の供給 |
・コック用サーボを用いて紙コップ一杯分の水を供給 ・下部タンクから上部冷却タンクに排出分と同量の水をポンプで送る |
問題なく実装出来た |
| 水の冷却 |
・ペルチェ素子を用いて上部冷却タンク内の水を冷却 ・サーミスタを利用して温度管理 |
外気温が低く、触ってわかるような効果は得られなかった |
| ゴミ箱・カップ供給 |
・カップディスペンサーを搭載し紙コップを供給 ・ゴミ袋を内部に設置し、外装部の穴より捨てられるようにした |
基本動作は問題ないが、本体の不安定性に加え設置位置の高さと動きの硬さにより不安が残る |
| タッチ操作 |
・タブレットから停止、水の供給用の操作 |
問題なく実装出来た |
| ウェブ関連 |
・ウェブアプリによる活動範囲及び時間管理 ・ウェブサイトによるスケジュール公開 |
管理用と公開用のウェブの実装は出来たが双方の連携が出来ていないため利便性が低い |
発表会における結果は以下の通りである。
総合順位4位
得票数 24,得票率 12%
機能の面では評価が高いが、ニーズがわかりにくいなどの問題点が発足した。
また、ブース展示で実際に水を飲むことができなかったことも票数を得られなかった一つの要因であると考える。
社会実装報告書のURLを以下に示す。
基本設計時点での開発スケジュールを図4に,実際の開発スケジュールを図5に示す。
図5.実際の開発スケジュール
各班員の作業時間の割合を以下に示す。
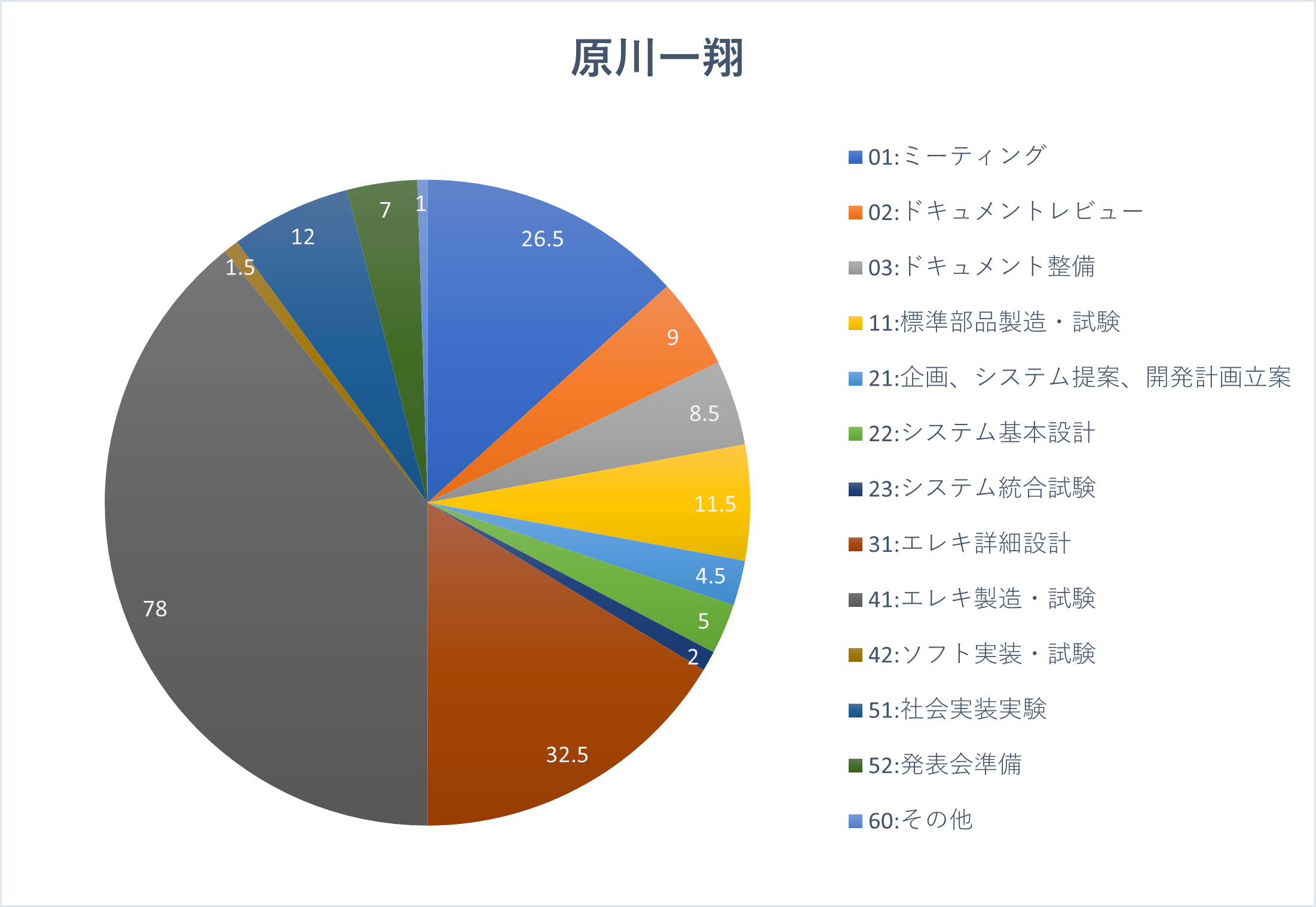
図6.作業時間割合(原川 199時間)
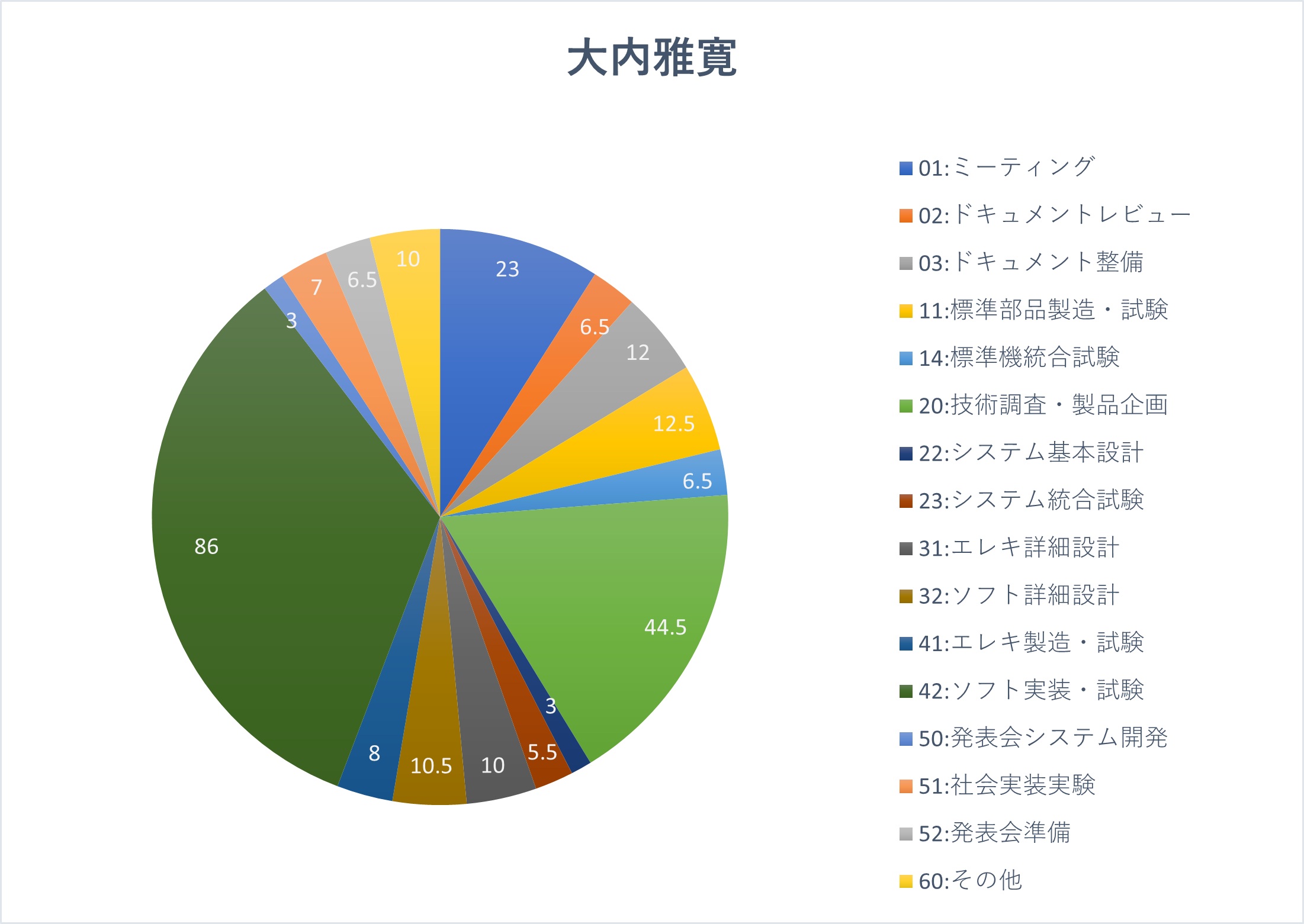
図7.作業時間割合(大内 254.5時間)
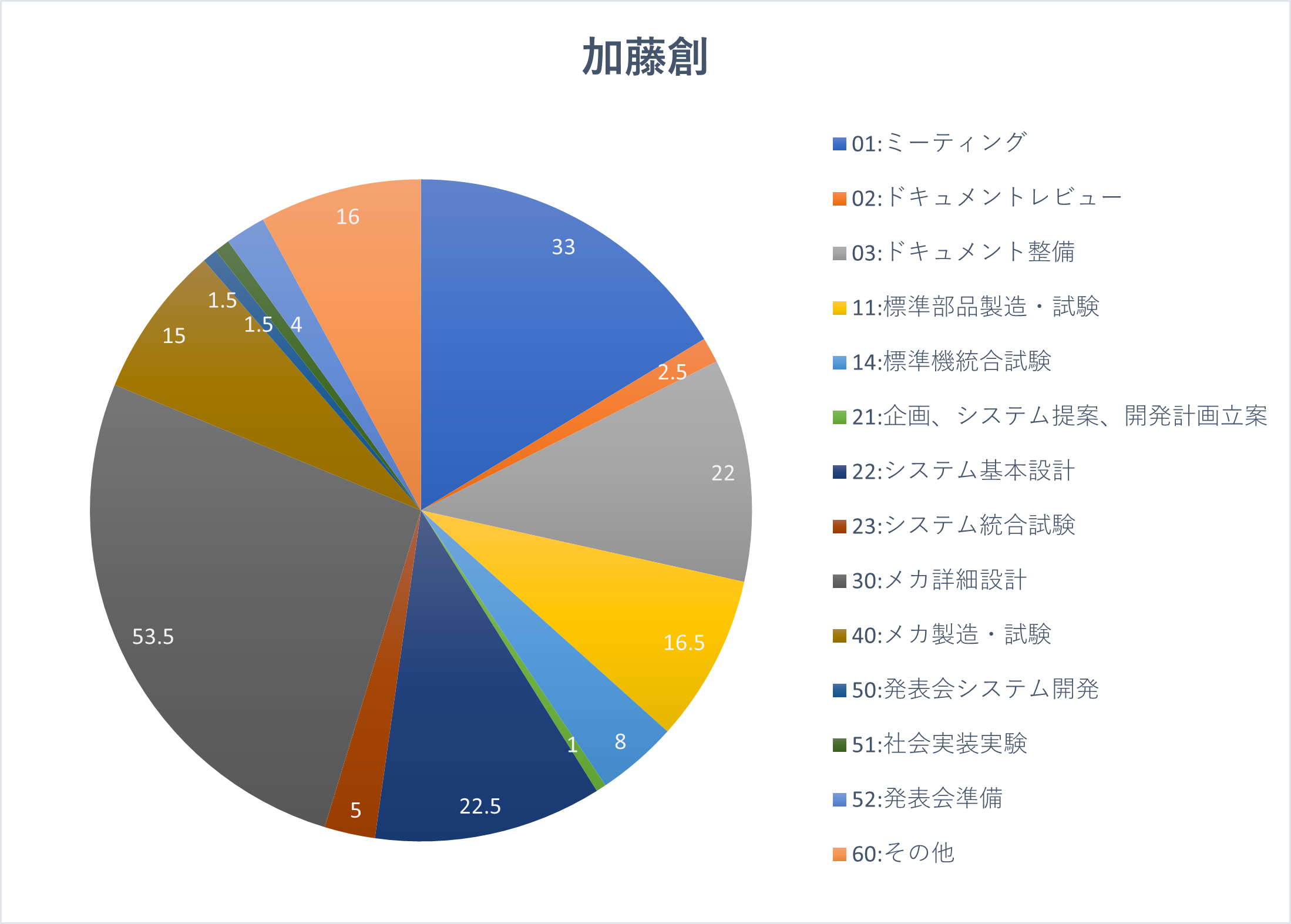
図8.作業時間割合(加藤 202時間)
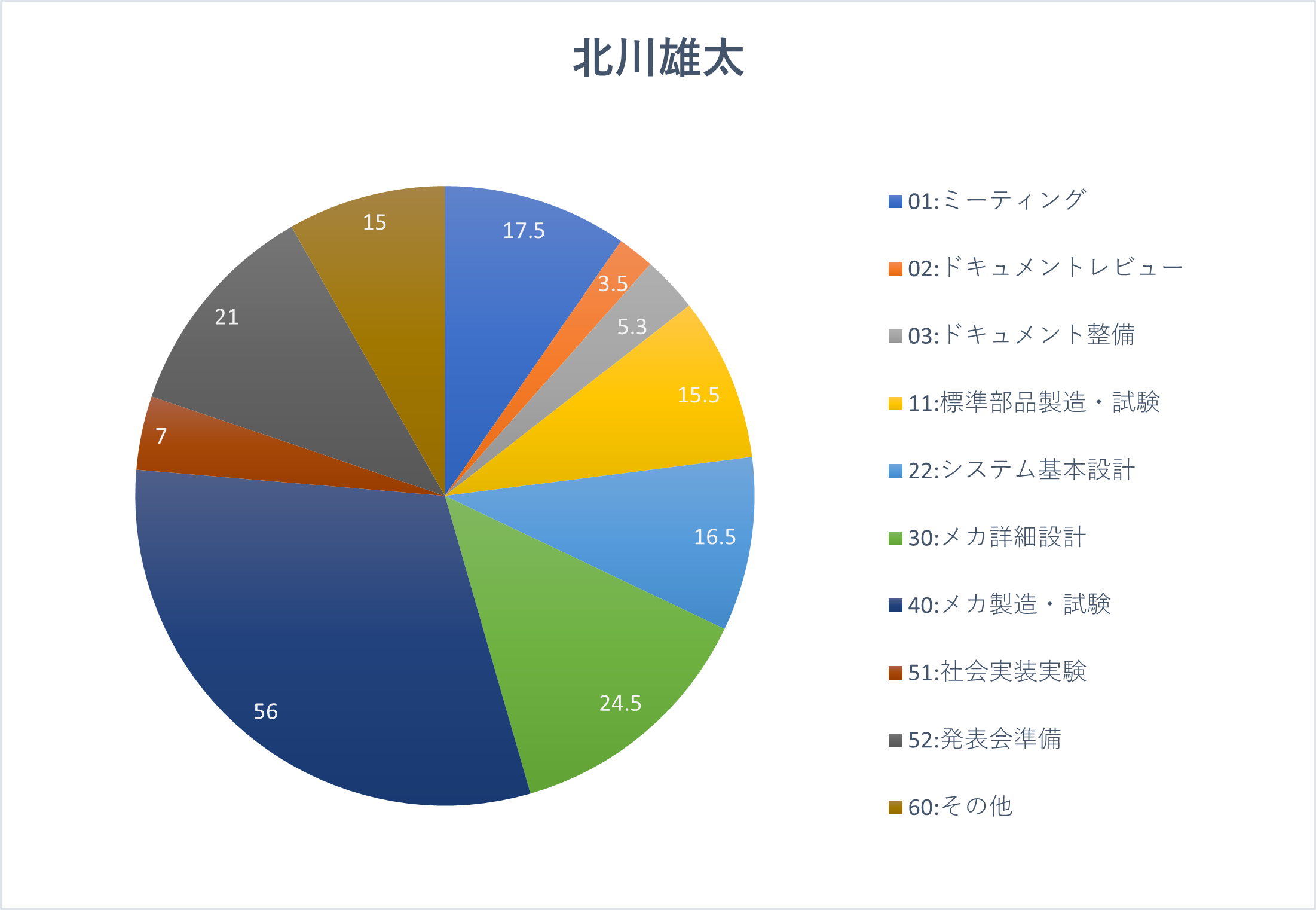
図9.作業時間割合(北川 181.8時間)
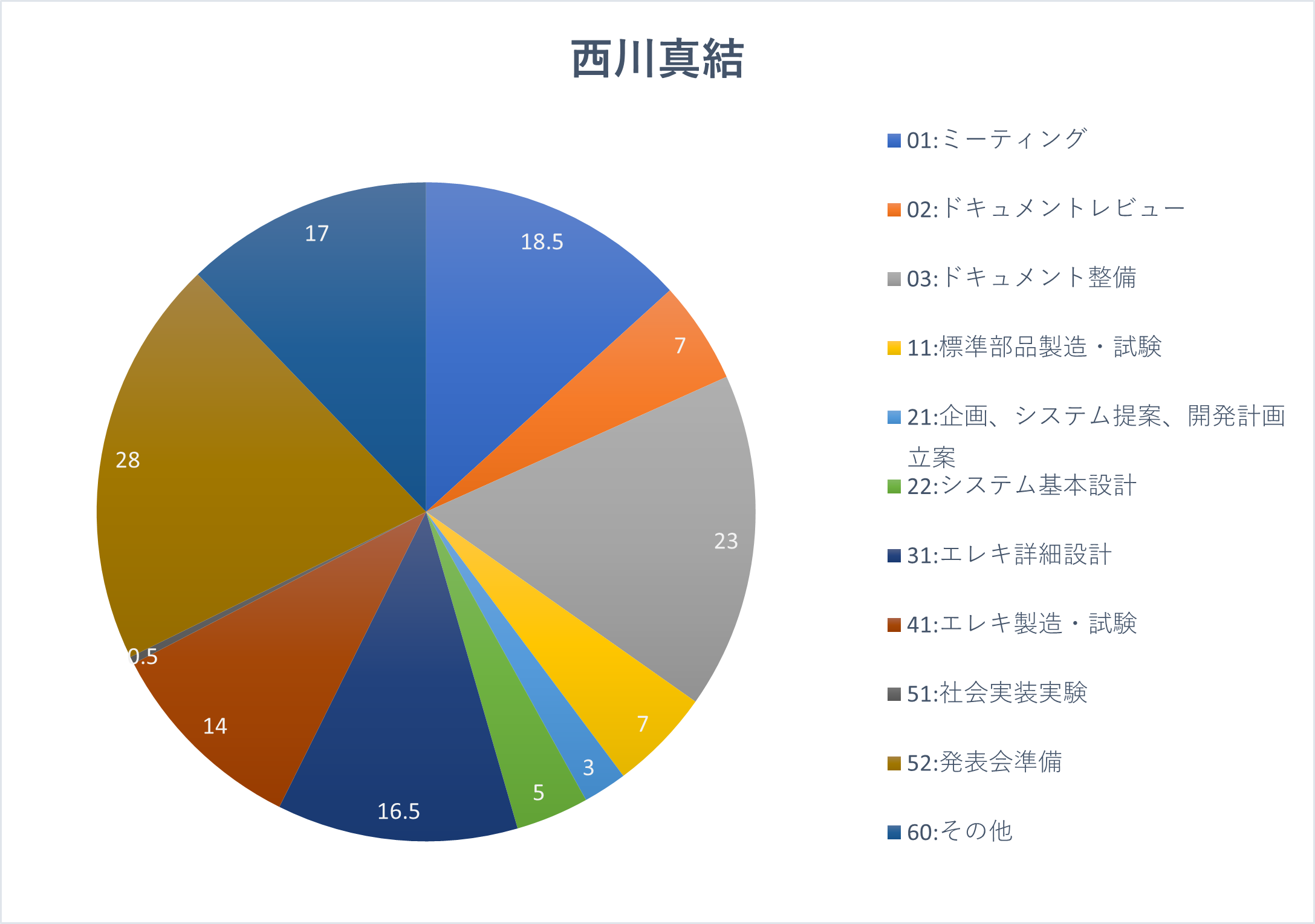
図10.作業時間割合(西川 145.5時間)
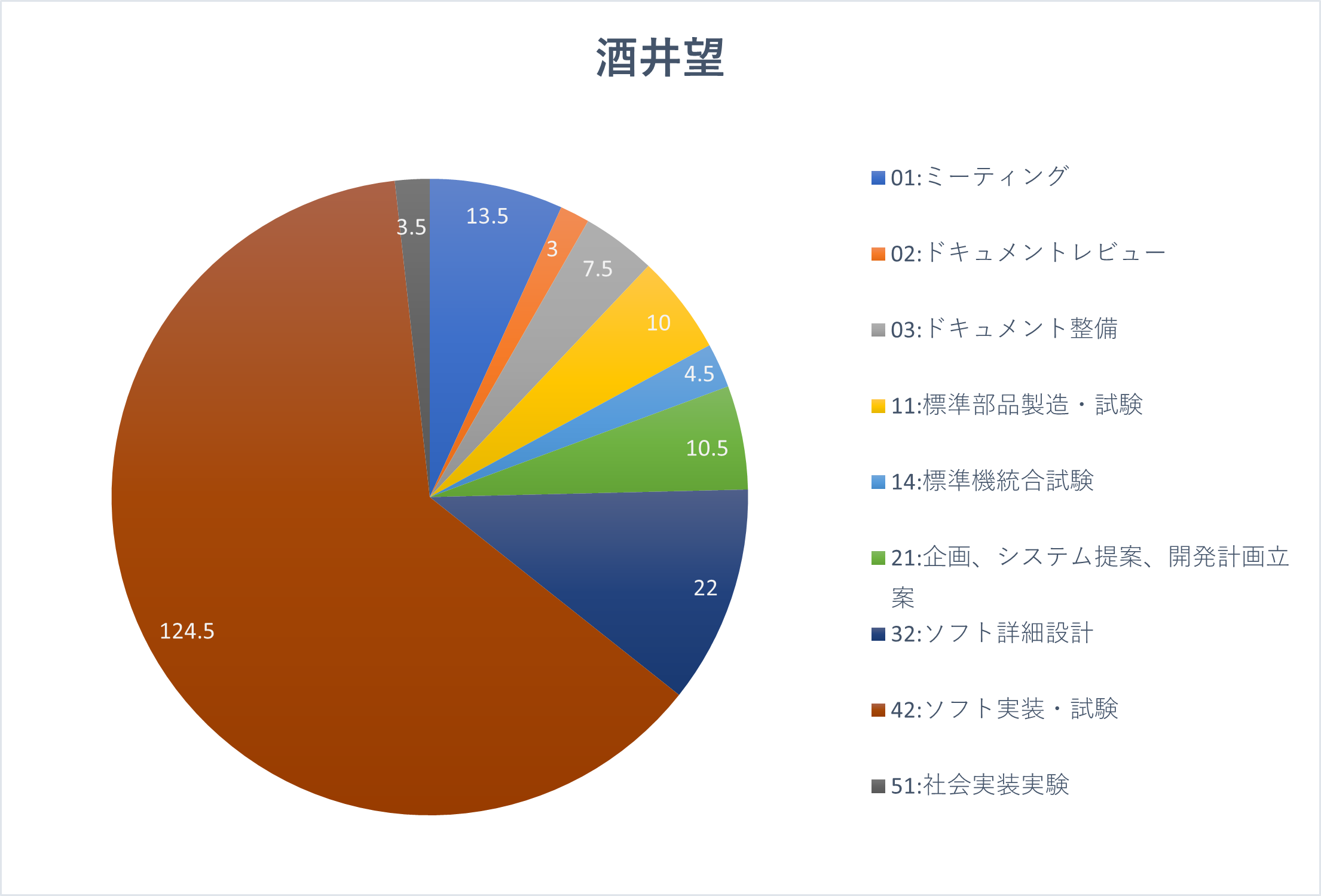
図11.作業時間割合(酒井 199時間)
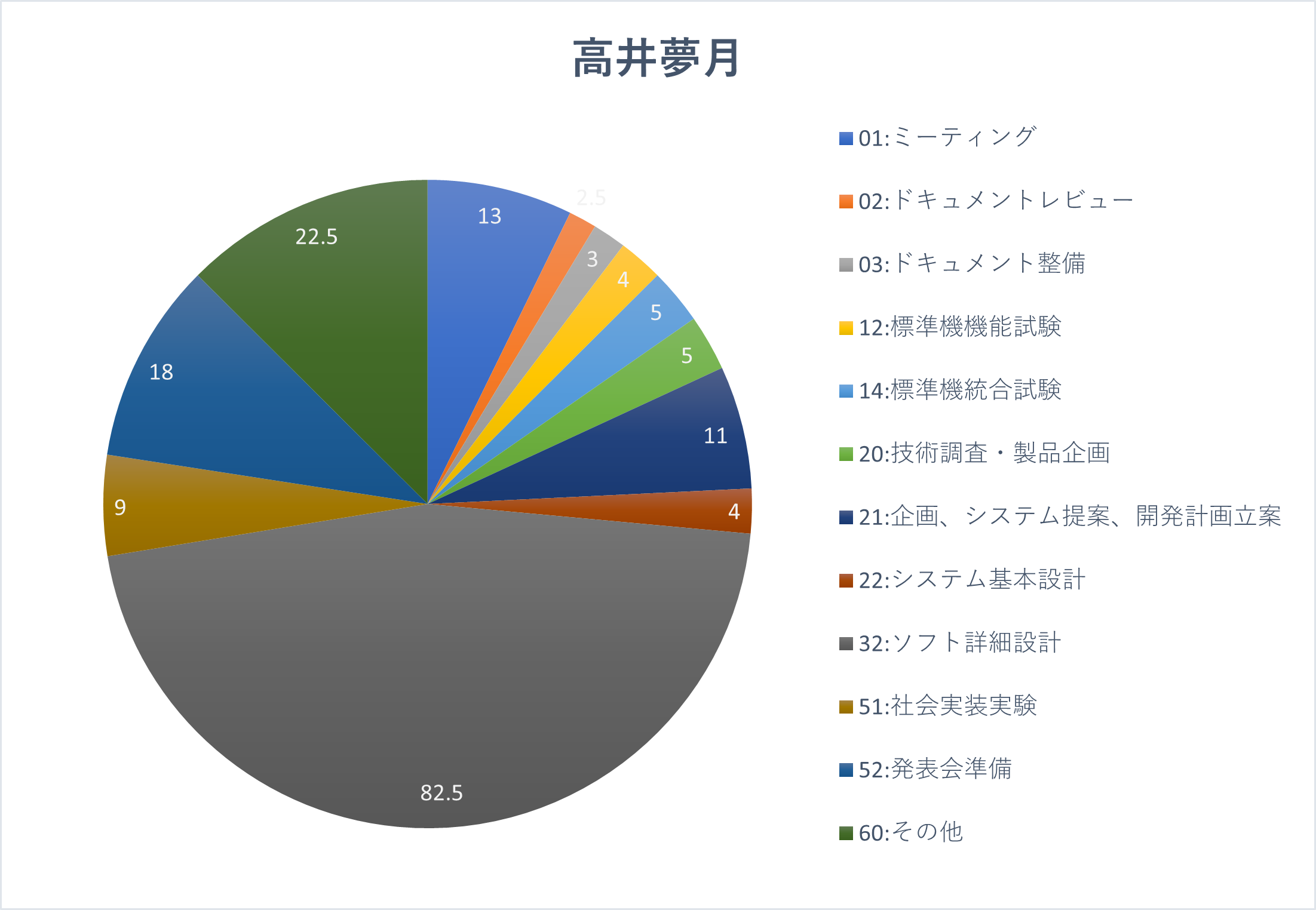
図12.作業時間割合(高井 179.5時間)
各パートの作業時間の割合を以下に示す。
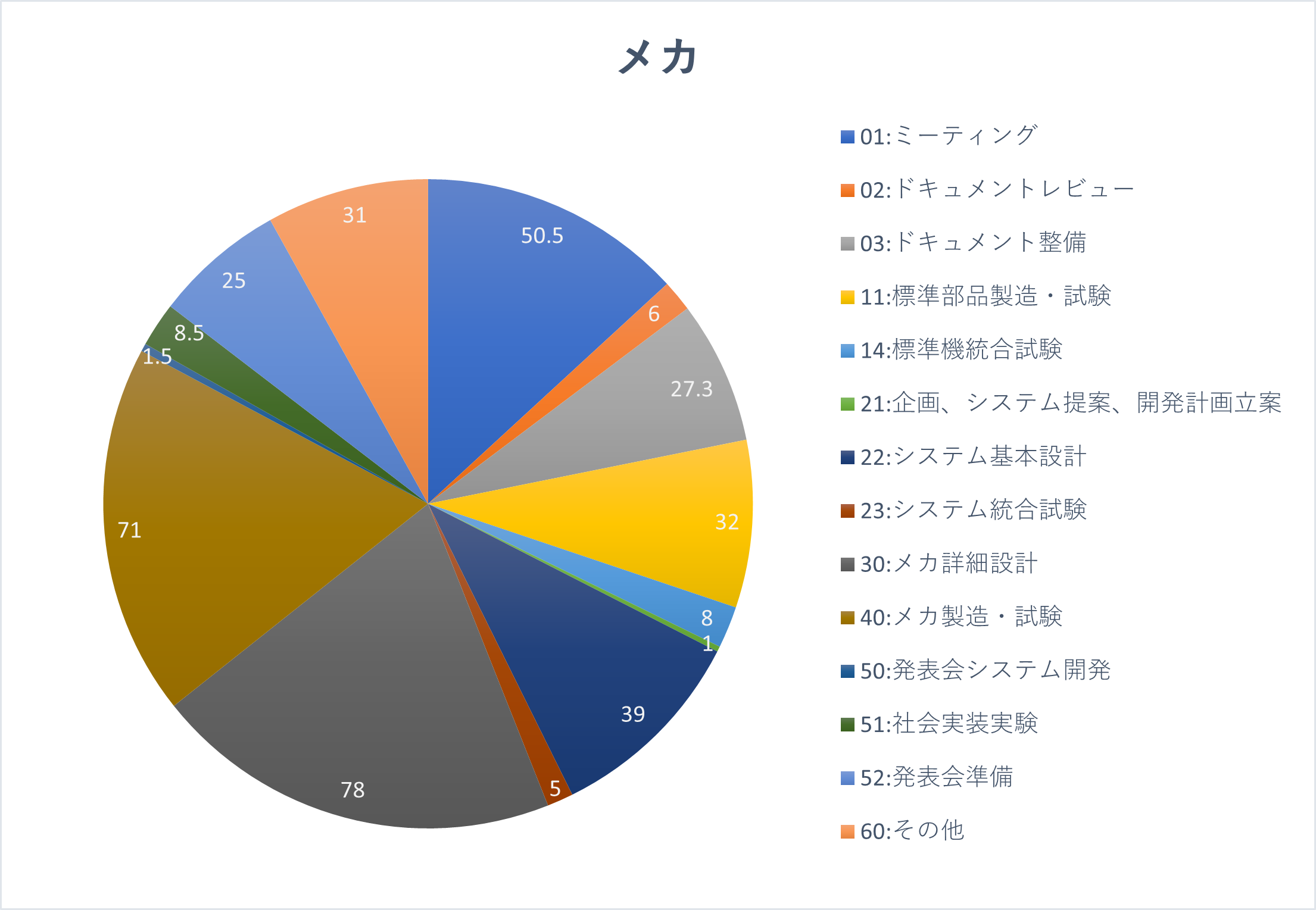
図13.作業時間割合(メカ 383.8時間)
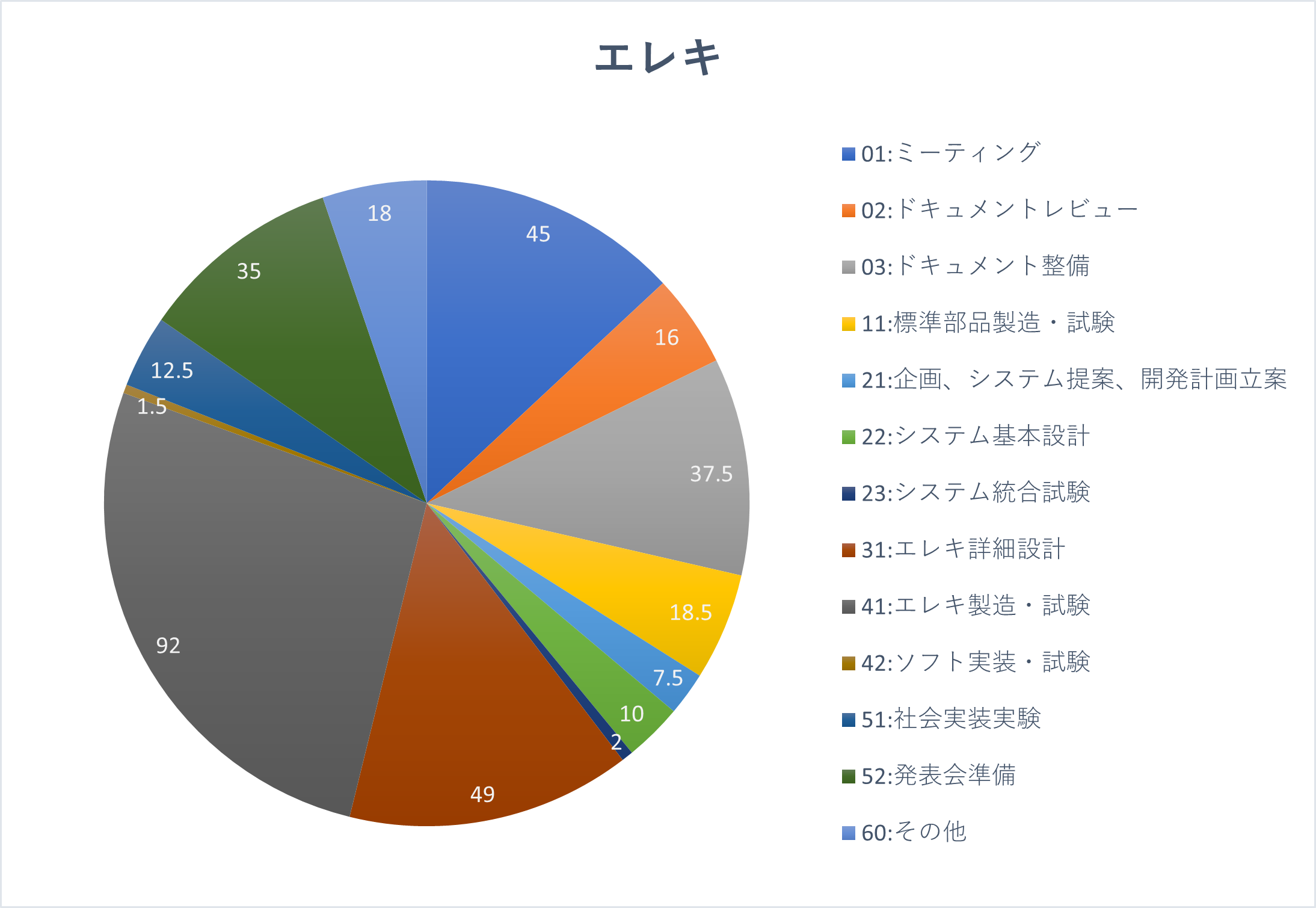
図14.作業時間割合(エレキ 344.5時間)
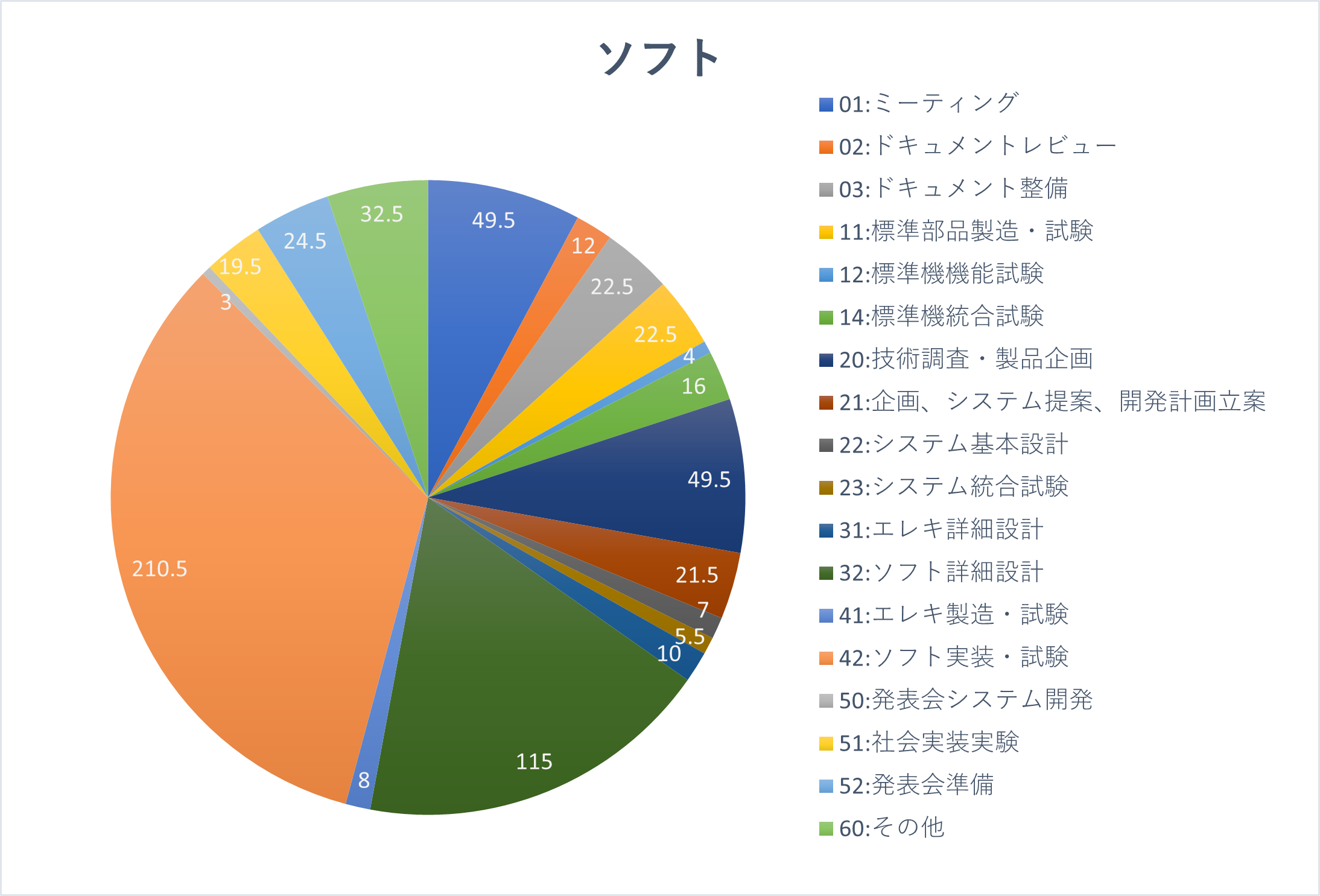
図15.作業時間割合(ソフト 633時間)
各パートの平均作業時間を表2に示す。
表2 各パートの平均作業時間
| パート | メカ | エレキ | ソフト |
|---|---|---|---|
|
|
|
|
|
各パート毎の分析、総括を以下に示す。
割合を見るとメカの詳細設計、製造・試験の割合が圧倒的に多い。
また、ミーティングの時間も多く、互いに連携を取り製作できていたことを示していると思われる。
コンセプトの段階で機能を限定したことが早期の製造につながったと考えられる。
コストとの兼ね合いを考えた結果、3Dプリンタや、アクリル板を多用することになった。
単純な構造、パーツにしたので消耗品として考えれば、取り換えが容易な形になったと思う。役割を分担したことで設計に時間を多く使うことになり、一定の段階で製造(試作)と設計を並行して行うことで改良、改善が容易になり、機体の性能の向上につながったと思う。
割合を見るとエレキの詳細設計、製造・試験の割合が圧倒的に多い。
他のパートと比べると、ドキュメント整備、発表会準備の割合が多い。これは、原川がPMであり発表担当をしたことや、西川がDMでありドキュメント整備を主に行い、発表会の資料を作成したことが大きいと思われる。
ArduinoからESP32への変更やサーボモータの電流不足が原因で、基板の変更や作り直しが余儀なくされた。
回路図の設計から実装まで当初の予定から変更点が多くあり、技術、知識不足を感じた。
「回路に流れる電流の調整のため、PWMの指令値をある値以上にしない」など、エレキだけでなく他パートと共有しながら開発することを学んだ。
クリエイティブ・ラボ内の基板加工機にはとても助けられた。また、ArduinoからESP32の変更で詳細設計に時間がかかり、開発の時間が短くなってしまった。大幅な変更により当初の予定通りの開発はできなかった。
ソフトの詳細設計、製造・試験の割合が多いが、他パートに比べて様々な種類の作業を行っている。
また、平均作業時間も長く全体的にソフトに力を入れていたことがわかる。
自律走行については不安定な部分が多く、走行中に止まらなくなってしまうなど安全性に欠ける部分もあり、完全に満足できるものができたわけではないが校内を自律移動させることができた点は良かった。
水の供給に関しては、安定して動作させることができた。
ソフトの部分では全体を通して、基本設計で実装したかった機能のほとんどを実装することができたので良かった。
ArduinoからESP32への変更の影響で、全体の設計に時間を要し、スケジュールが後ろ倒しになった。仕事の分担については、各メンバーの得意不得意を考慮し、適材適所で割り当てることができた。
MIRS2404の班員の所感を以下に示す。
初めは何も分からない状態からのスタートだったが、設計、実装を通し、沢山のことを学べた1年間だった。
開発中の変更や修正が多く、当初のガントチャート通りの開発はできず、予定通り開発することの難しさを学んだ。PMとしては、班員の得意不得意を考え、適材適所の割り振りができたと思う。
これまでROS2を使ったことがなく、開発計画を立てたときにはROS2に対する知識が不足しており、何をどのように実装すればよいかわかっていない部分が多かった。そのため、計画通りに開発を進めることができず、開発の途中で何度も実装方法の変更や計画の見直しをすることになった。 しかし、最終的に実装したかった機能を実装することができてよかった。
メカとして主に全体の設計を行った。3Dcadは経験が浅く、難しいところもあったが完成まで漕ぎ着くことができてよかった。プロジェクト全体としては遅れてはいたものの連携を取り開発を進めることができたと思う。
テーマに魅力を感じられず、少しモチベーション作りに苦労した。 紙コップホルダやフレームという難易度の低い設計を主に担当したので、挑戦している感じがしなかったのが反省点である。 ここに記してはいないが、ポスター作成などで班に貢献できたと思うのでよかった。
開発においては元はArduinoの担当だったがROS2の導入に際してESPの開発担当に変更になった。初めて触るものが対象になりmicro-rosに関しても全く分からないところからのスタートとなり大変だった。いろんな人の助けを借りることになったが完成させられてよかったと思う。
前期は画像認識やLiDARのセットアップなど意欲的に作業に取り組むことができたが、後期は開発から一歩退き、動画編集を中心に作業に取り組んだ。ROS2についてもっと調べておくべきだと思った。
専門的な知識がなく、分からないことだらけだったが、最後までやり切れたのは良かった。エレキとしての仕事には自信がないが、パンフレットの作成やDMなどを通じてチームには貢献できたと思う。