3. 実施スケジュール
実証実験の実施スケジュールを表1に示す。| 日付 | 時間 |
|---|---|
| 1/20 | 13:30~14:00 |
| 1/21 | 12:00~13:00 |
| 1/22 | 12:00~13:00 |
当初の予定では1/20の12:00~13:00にも実施する予定であったが、サーボモーターの動作不良により実施できなかったため、1/22に追加で実施した。
4. 実験内容
上記の時間の間D科棟1階の廊下を往復させた。通りかかった人にロボットを停止させ、水を出す動作を体験してもらった。また、アンケートにも回答してもらった。5. 実験結果
実証実験中に起きた出来事を表2に示す。| 日付 | 時間 | 出来事 | 備考 | 合計動作時間 |
|---|---|---|---|---|
| 1/20 | 13:45 | 移動を停止させ、水を一杯出した。 | 問題なく動作した。 | 30分 |
| 13:55 | 移動を停止させ、水を一杯出した。 | 水出しはできたが、移動の再開ができなかった。RVizを見るとtfを受け取っていなかったのでネットの通信によるものだと考えられる。 | ||
| 1/21 | 12:10 | 3人来て、1杯水出しをした。 | 問題なく動作した。 | 30分 |
| 12:15 | ロボットが壁に衝突しそうになったため緊急停止ボタンを押して移動を停止させた。 | 壁に衝突しそうになったのはネットの通信が悪くなったことが原因だった。また、緊急停止ボタンを押すときに外装がついていることで押しにくくなっていることに気がついた。 | ||
| 12:20 | 3人来て、1杯水出しをした。 | 問題なく動作した。 | ||
| 12:30 | 前兆もなく突然後ろに倒れた。 | cmd_velトピックの出力ログを見ると前進している途中に一度だけ後退の命令が出ていたため、それが原因でバランスを崩して転倒したと考えられる。 | ||
| 1/22 | 12:35 | 一人に停止・水出しの動作を体験してもらった。 | 問題なく動作した。 | 30分 |
| 12:45 | ラズパイとpcの通信が切れ、移動ができなくなった。 | |||
| 12:55 | 2人に水を出す動作だけ体験してもらった。 | PCとRaspberry Pi間の通信不良により移動中に停止するところは試してもらえなかった。 |
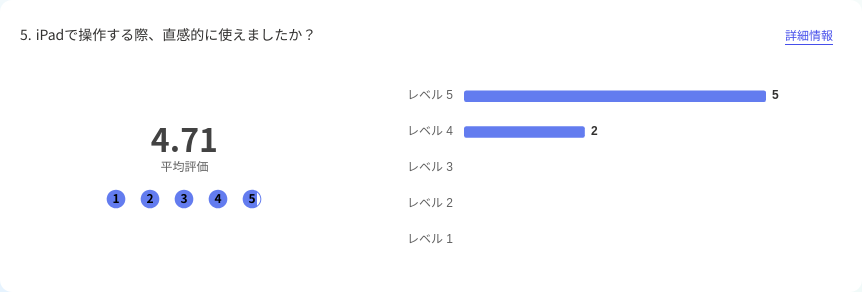
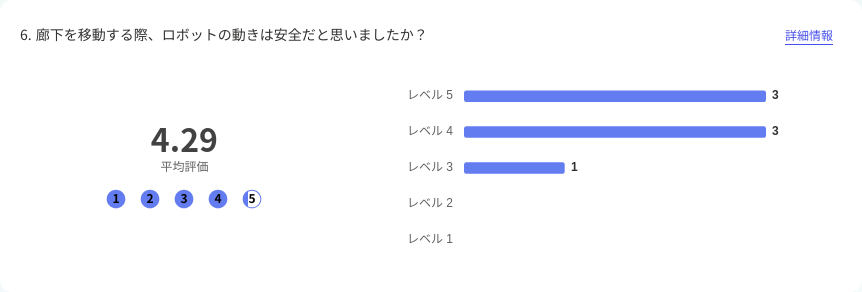
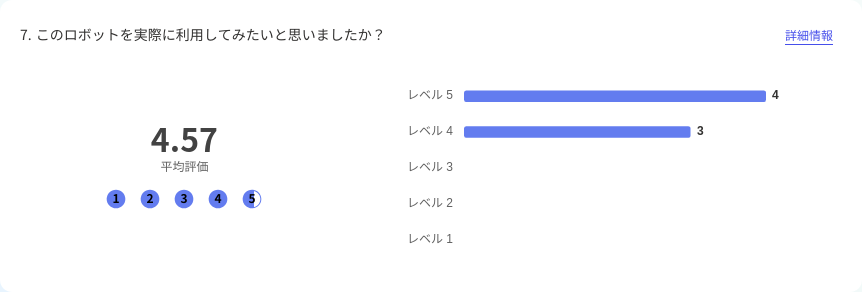
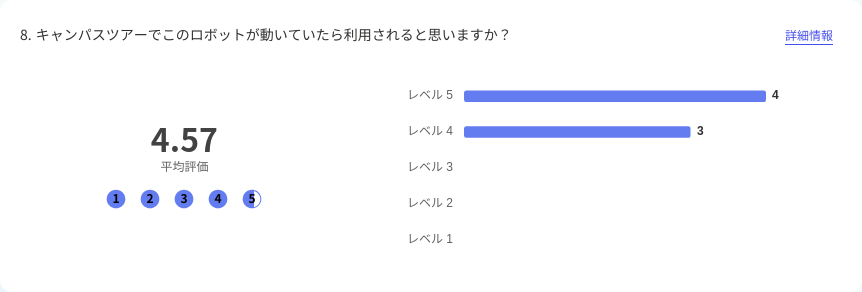
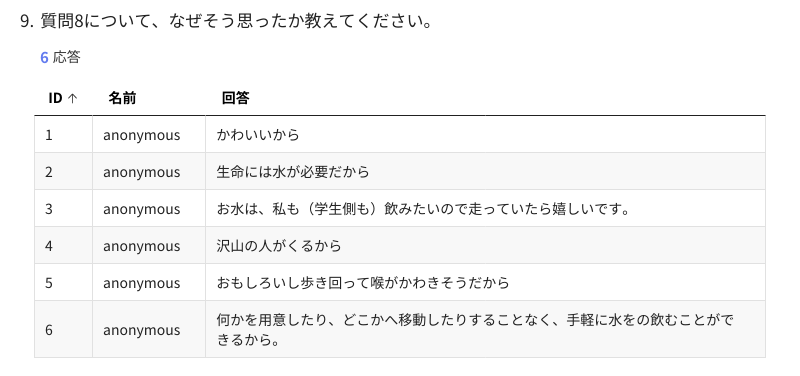
アンケートの内容とその結果を図1〜図13に示す。質問3~質問10の選択肢は、
1 = 全くそう思わない 2 = あまりそう思わない 3 = どちらともいえない 4 = そう思う 5 = 非常にそう思う
である。
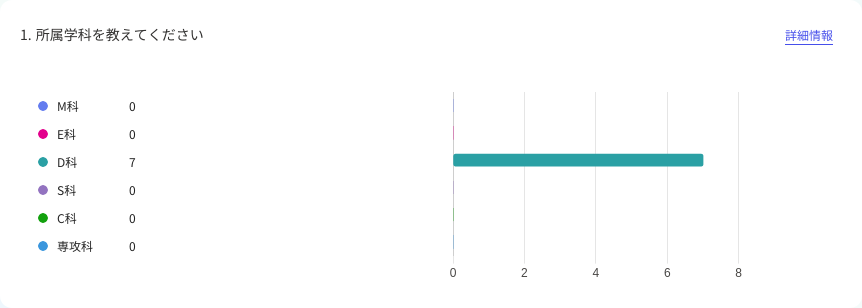 |
| fig1. 質問1 |
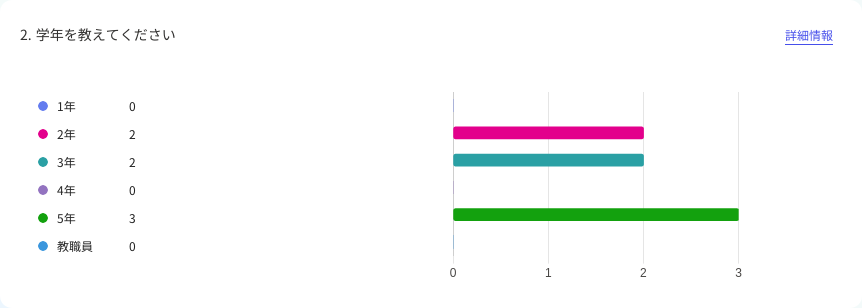 |
| fig2. 質問2 |
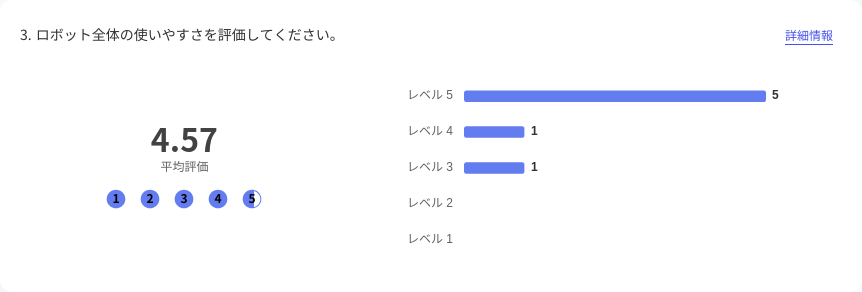 |
| fig3. 質問3 |
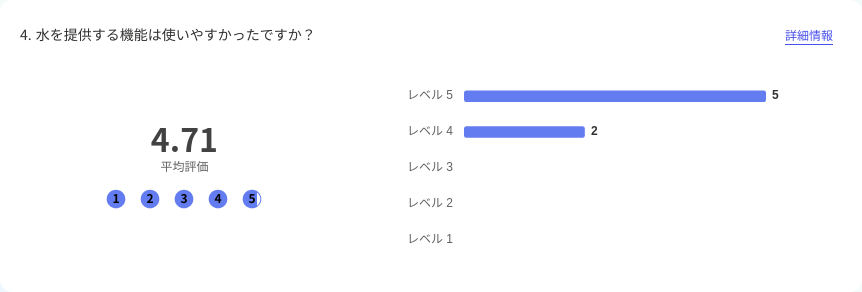 |
| fig4. 質問4 |
 |
| fig5. 質問5 |
 |
| fig6. 質問6 |
 |
| fig7. 質問7 |
 |
| fig8. 質問8 |
 |
| fig9. 質問9 |
 |
| fig10. 質問10 |
 |
| fig11. 質問11 |
 |
| fig12. 質問12 |
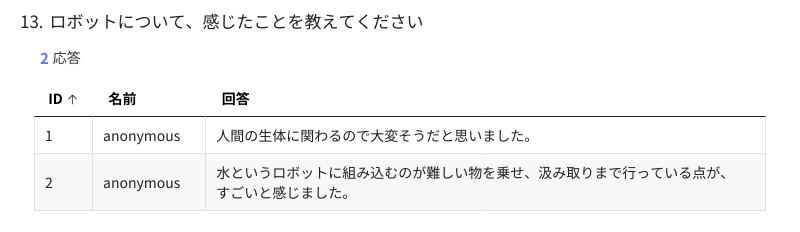 |
| fig13. 質問13 |
6. 考察・改善点
水出し機能について
実証実験中、水出し機能は常に安定して問題なく動作していたが、冬に行なったためもとから水が冷たく、ペルチェ素子で冷やすことができているか検証することはできなかった。基本設計を作成したときはiPadとの通信をインターネットで行うことによりiPadを操作してからロボットが動作するまでに遅延が発生することが懸念されたが、その問題はなかった。自律走行機能について
自律走行は実証実験中に通信不良で走行できなくなることが何度も発生したり、突然倒れてしまうことがあったりと安定しなかった。これにより、連続して稼働することができる時間はとても短く、10~20分に1回は動作不良が起きそのたびにプログラムを再起動しなければならなかった。実証実験中に一度壁に衝突しそうになったが、これは走行中に通信不良になると最後に送られた速度司令に従って走行し続けてしまうことが原因である。
アンケート調査について
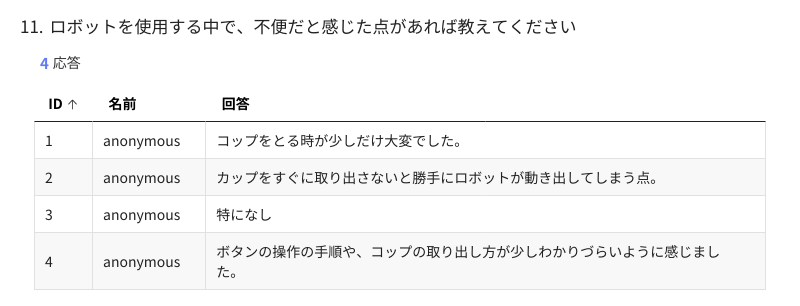
5段階での評価については、すべての質問に対して平均評価が4を上回っており、非常に高い評価を頂いた。ただ、廊下を走行する際、ロボットの動きは安全だと思いましたか?という質問に対する評価が他の質問よりも低いことから、利用者にも自律走行の安定性の向上が求められていることがわかる。ロボットを使用する中で不便だと感じた点があれば教えてください、という質問に対しては、
・コップを取るときが少し大変でした。
・カップをすぐに取り出さないと勝手にロボットが動き出してしまう点
・ボタンの操作の手順や、コップの取り出し方が少しわかりづらいように感じました。
という回答が得られた。いずれの点についても、ロボットを製作した人は使用方法をわかっているため気がつくことができなかった。
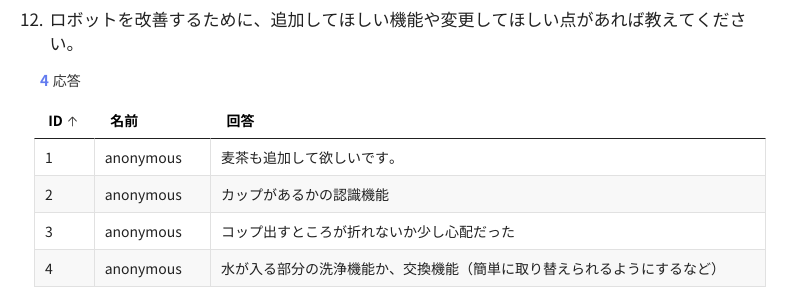
改善点
通信が切れても走行し続けてしまうのはとても危険であるため、通信が切れたときにはすぐに停止するように実装するべきであった。アンケートで、カップをすぐに取り出さないと勝手にロボットが動き出してしまう点や、ボタンの操作の手順やコップの取り出し方が分かりづらかったという点が不便に感じたという意見が得られた。 カップをすぐに取り出さないと勝手にロボットが動き出してしまう点については、水を出し終えてからから移動を再開するまでの時間を延長したり、周りに人がいるかLiDARで検知し、人がいないことが確認できてから移動を再開するようにしたりすることで改善できる。
ボタンの操作の手順やコップの取り出し方が分かりづらかったという点については、「停止」「水を出す」というボタンを表示させるだけでなく、説明文を表示させたり画面に説明用の画像を表示させたりすることで操作の手順がわかりやすくなると考えられる。
7. 総括
この実証実験で検証したかった、連続して稼働したときにどれだけ安定して校内を移動することができるか、校内を移動しながら冷たい水を提供することができるか、の2点についてまとめる。連続して稼働したときにどれだけ安定して校内を移動することができるか、という点については、連続での動作について最初はバッテリーの持続時間を気にしていたが、それよりも通信不良による動作不良のほうが深刻だった。
動作の安定性という点についても、10~20分に一度は動作不良が起きそのたびにプログラムを再起動しなければならずとても実用的とは言えなかった。 結論としては、通信不良にさえならなければ司令どおりに走行し走行中に人を避けることもできて問題ないのだが、通信不良になると走行機能が全て動かなくなるため、安定して校内を移動することができる時間は10~20分程度で、総合的に見ると安定して走行できるとは言えない。 校内を移動しながら冷たい水を提供することができるか、という点については、水を提供する機能は実証実験中に問題が起きることはなく常に安定して動作していたが、水が冷却されているか、という点についてはその真偽を検証することができなかった。
MIRS2404ドキュメント管理台帳へ