本ドキュメントはMIRS2403の開発完了報告書である。完成した機体を以下に示す。
以下に華蟻の全体の写真を示す。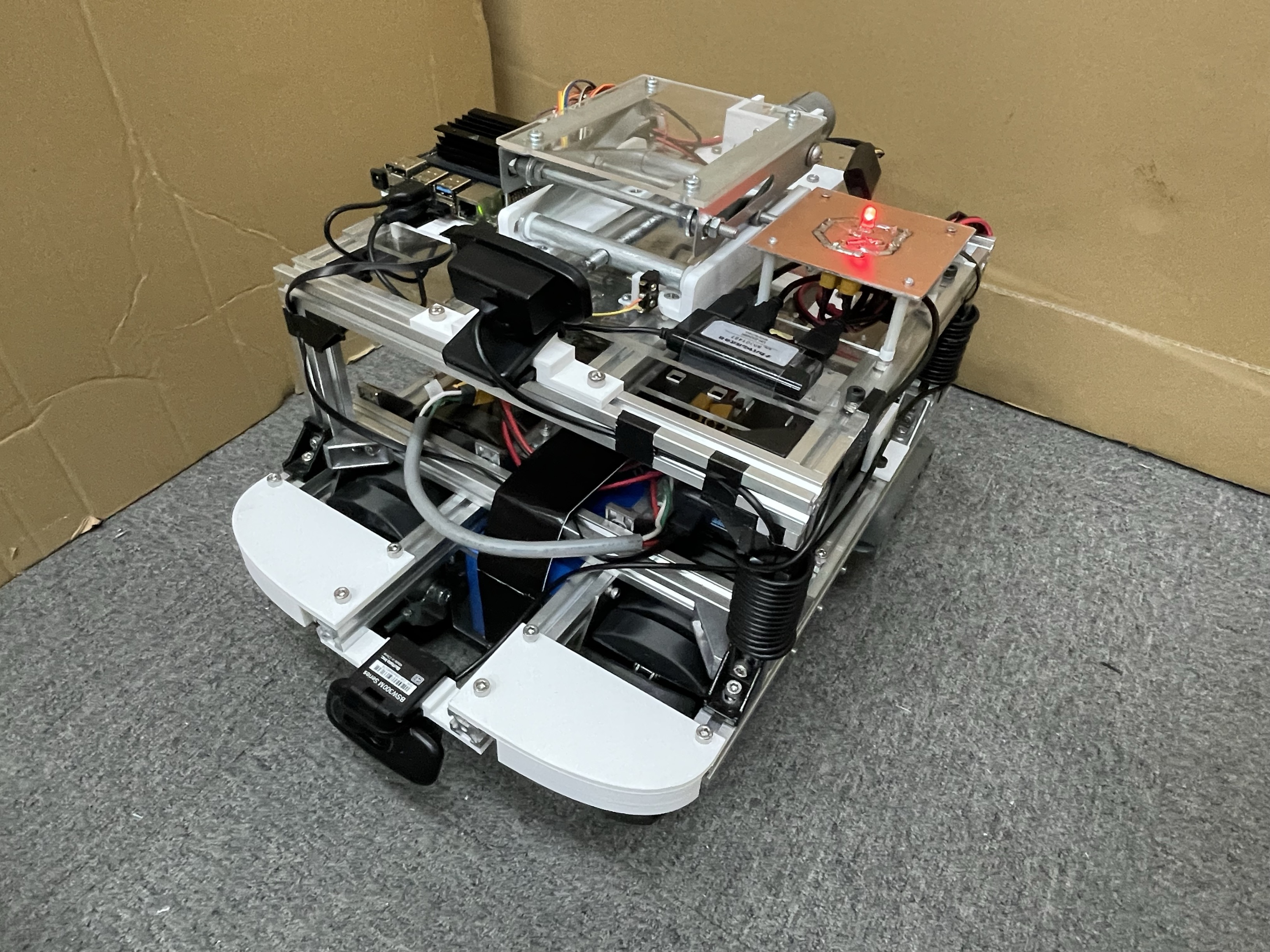
fig.1 華蟻 全体
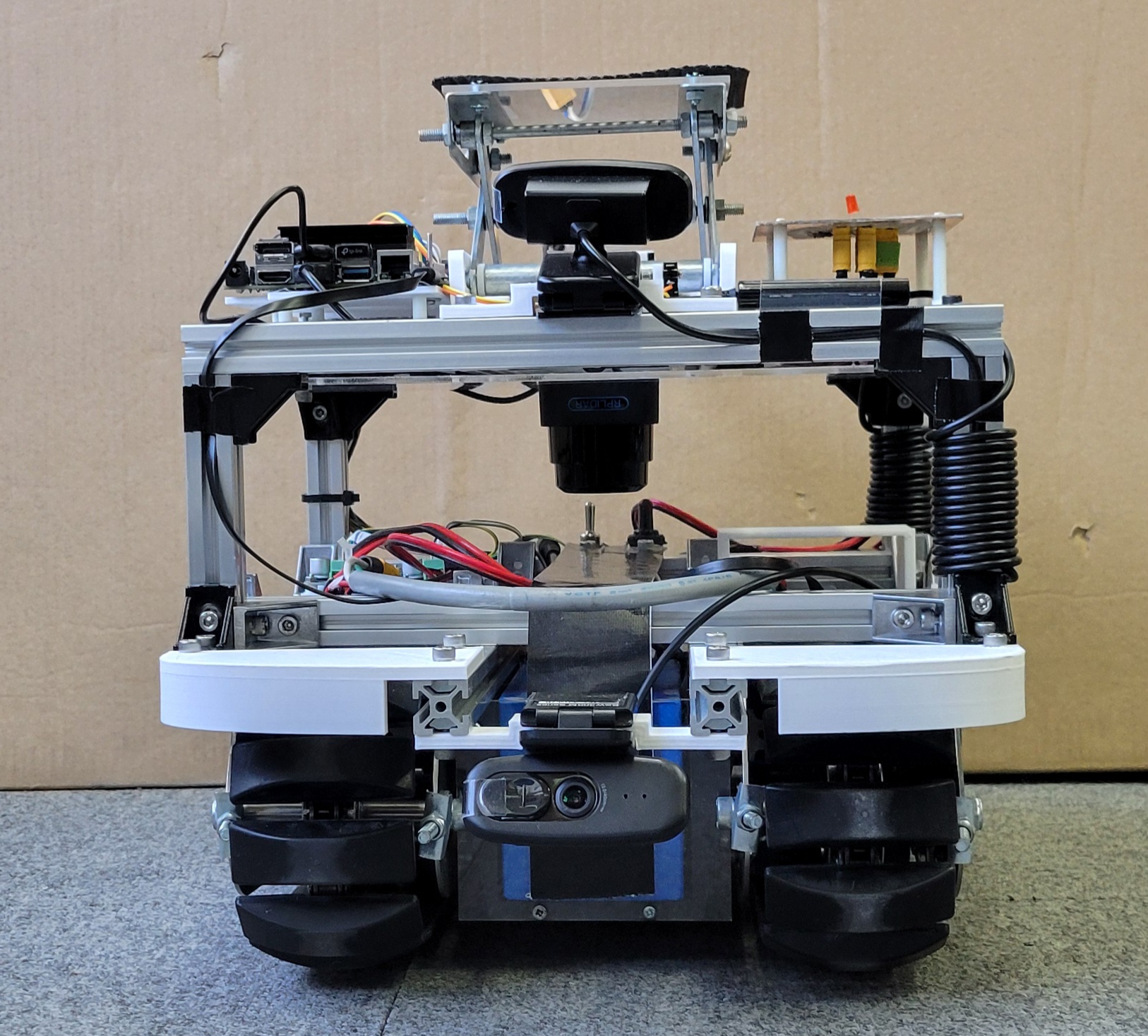
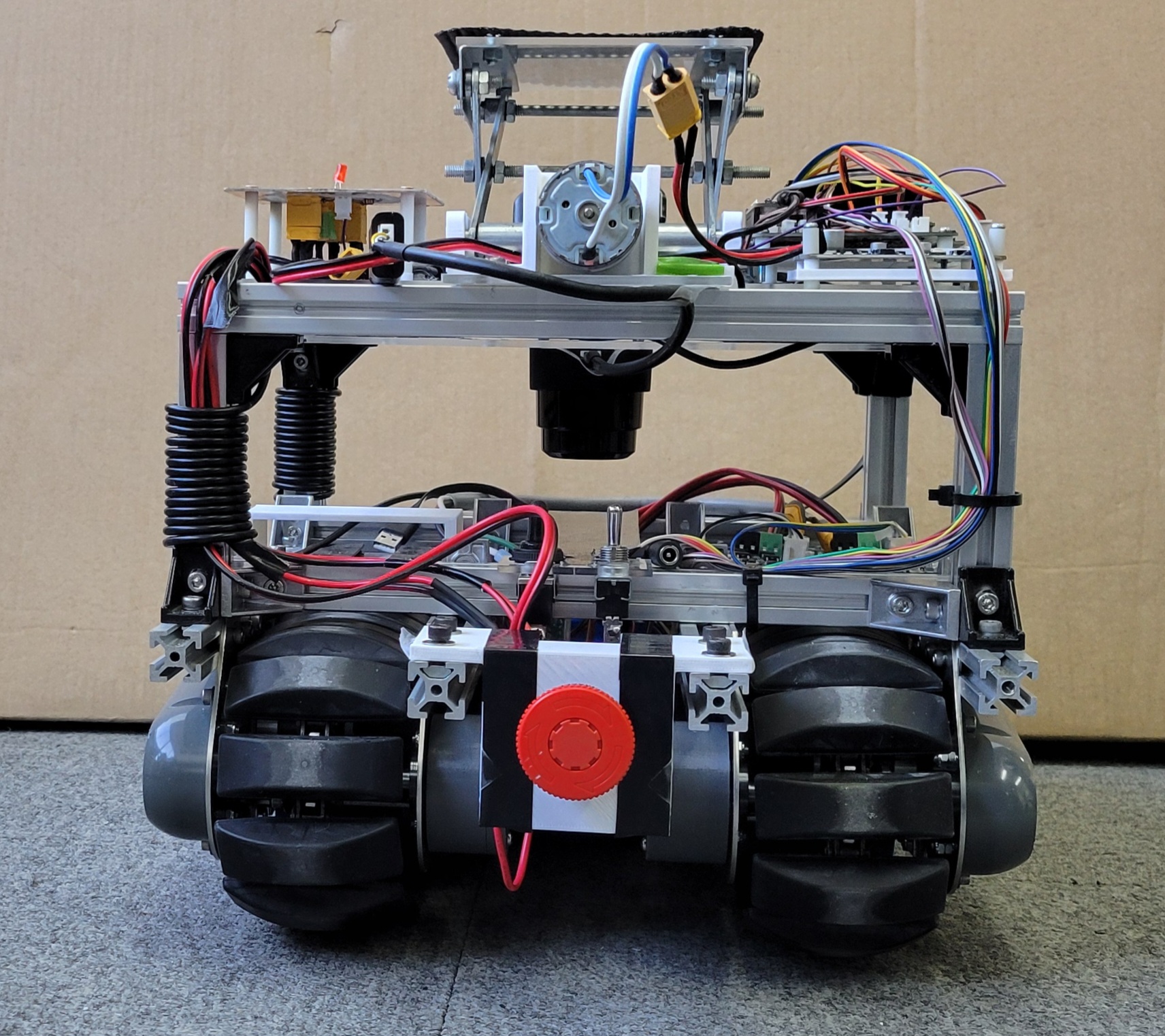
fig.2 華蟻 正面と背面
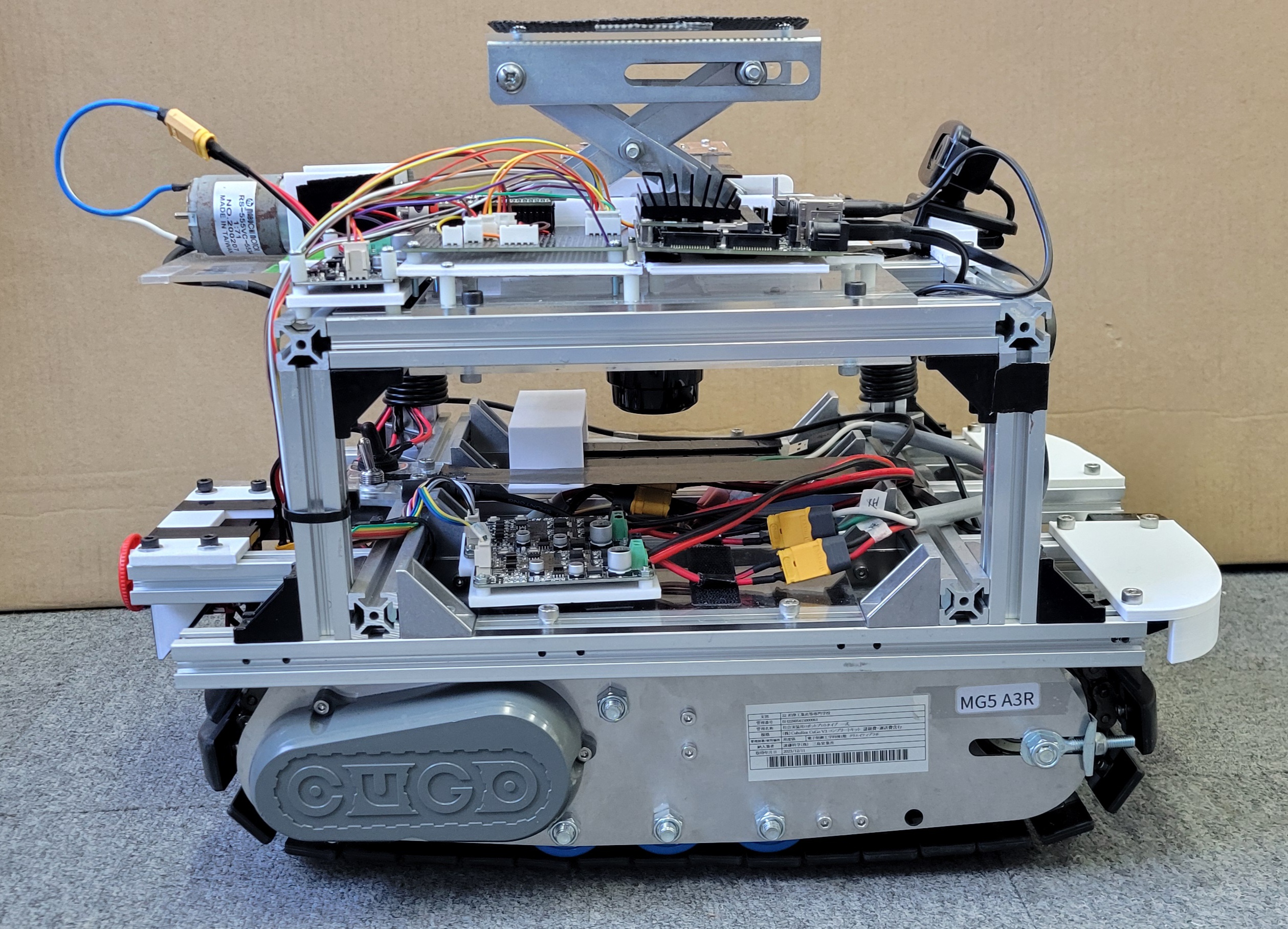
fig.3 華蟻 側面
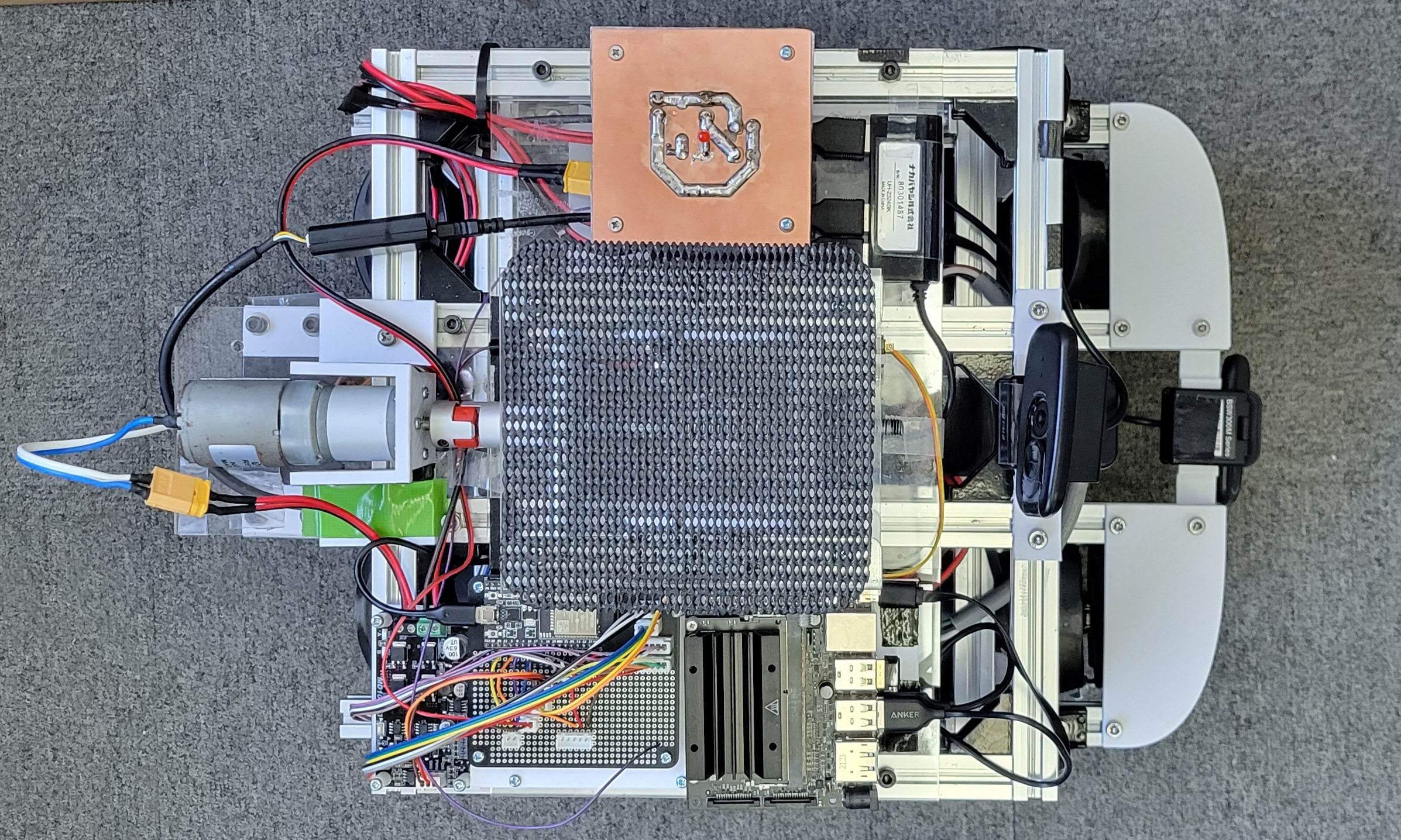
fig.4 華蟻 上面
| 名称 | MIRS2403開発完了報告書 |
|---|---|
| 番号 | MIRS2403-REPT-0001 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2025.02.14 | 稲 志展、勝亦 柚斗、菊池 檜、小林 孝博、小林 亮介、内藤 裕之、中村 介、舟久保 友花 | 小谷先生 | 初版 |
本ドキュメントはMIRS2403の開発完了報告書である。完成した機体を以下に示す。
以下に華蟻の全体の写真を示す。
機体評価をtable1に示す。
table1 機体評価
| 機能名称 | 概要 | 評価 |
|---|---|---|
| 椅子の認識 |
前方に設置されているカメラを用いて、椅子の下に貼ってあるArUcoマーカを認識する。 それにより、運ぶべき椅子の位置を取得することでルートを作成する。 |
椅子を認識し椅子の下に進入することができた。 認識できなかった場合回転をすることで、認識率が発表会時よりも上昇した。 |
| 椅子の昇降 |
椅子の下に進入した後、機体上部のジャッキを用いて椅子を持ち上げる。 |
ジャッキを用いて問題なく椅子を持ち上げることができた。 椅子の重心からずれているとジャッキで持ち上げても脚が地面についていたり、走行中に椅子が落下することがあった。 リミットスイッチが反応せず、モータマウントが破損することがあった。 |
| 椅子の配置 |
指定された数の椅子を指定された位置へ配置する。 |
実証実験では5脚の椅子を連続して配置することができた。 椅子の脚の幅である390mmに対して配置誤差は平均して132mmだった。 |
発表会における結果は以下の通りである。
総合順位1位
得票数 86,得票率 41%
発表会では、小林亮介が発表を担当した。
ステージ上でのパフォーマンスやMV、実演により、プレゼン終了時点で多くの票を獲得することができた。
ブース展示では実際に来場した方々に動作の様子を見てもらうことで期待が高まったと考えられる。

基本設計時点での緑色のガントチャートを以下に示す。
実際に行った作業の橙色のガントチャートを以下に示す。
メカ、エレキは詳細設計と製造、試験に同程度の時間をかけていて、ソフトは実装に時間をかけていた。
ソフトはROS2の導入などで他のパートよりも作業時間が大幅に多かった。
全体的に日程が遅れていたが、発表会当日には動作する機体を作成でき、その後実証実験では5脚の椅子を運ぶことができた。
発表会でも最優秀賞をとることができ、自分たちの機体が評価されよかった。
| システム提案 | 基本設計 | 詳細設計 | 最終的な完成度 |
|---|---|---|---|
| 配置手配 | webアプリ開発 | 配置の自動生成廃止 | 〇 |
| 椅子の昇降 | ジャッキ使用 | 標準機回路ボックス不採用 | △(パーツ破損あり) |
| 椅子の運搬 | クローラ、ジャッキ使用 | 〇 | |
| 椅子の配置 | カメラでの椅子認識、LiDAR | 〇 | |
| 椅子の回収 | カメラ認識、LiDAR | 廃止(椅子配置と同様にできる) | ー |
| ラックの輸送 | 廃止 | ー | ー |
MIRS2403の班員の所感を以下に示す。
無事機体が完成してよかった。3Dプリンタを用いた部品製造の経験が浅く試行錯誤しながら設計していくのは面白かったが、
当初の予定より設計が遅れて迷惑をかけてしまったので、班員のみんなに申し訳なかった。
個人の作業を行っていくうえでチームに迷惑をかけたことがあったが無事に機体が完成し、動いてよかった。
実際に回路設計をして実装するのが初めての体験だったため、とても良い体験となった。これからこの体験を生かしていきたい。
今回の開発は困難の連続でした。チームで電子回路設計に取り組みましたが、特に電源基盤のプリント基板化に苦労しました。
KiCadも初めてで苦戦し、基板を5回も作り直しました。
心が折れそうになりましたが、チームで励まし合い、知識を共有して乗り越えました。
完成時の達成感は格別で、チームワークと諦めないことの大切さを学びました。
この経験は今後の仕事に必ず活かせると思います。
今回初めてfusionを利用したため苦戦したところが多々あった。MIRSの授業が始まる前からこのような知識を身につけておくべきだったと思う。
一方で、設計、製造、手直しといった製品を作成する一連の流れを経験することができたと感じている。
計画どおりに進めることの難しさを感じた。設計したものを改築していく過程で非常に時間がかかったため、
Fusionの再現性を活用し、作成前にある程度予測した上で製品を作り上げていくことの重要性を学びました。
本業のソフトの仕事ではあまり活躍したとは言えず、班員に頼り切りだったため、実力不足を感じた。
ソフト以外の仕事ではPVやポスター、
プレゼンを頑張ってチームの頑張りをPRするという面でチームに還元出来たと思う。プレゼン資料やPVを作る上で初めて使うツールを使って
様々な資料を参考にしたのでそういった面では大きく成長できたと思う。
開発作業を通じて作業計画を立てる重要性がよくわかった。自分はウェブアプリの開発を行ったが、実際に作業をしてみると自分の思っている以上に
やることがたくさんあり、見積もった作業を計画通りに進める難しさを実感した。
また、ウェブアプリ開発は自分の触れたことのない分野であり、最初は全く分からない状態であったが、
班員や他チームの人と相談して開発を行うことで自分の行き詰った作業を解決することができた。
周囲の人にも頼って作業することの大切さを身をもって感じた。
ROS2という個人的に興味があった分野の開発ができて面白かった。
ROS2関係ばかりやっていたので手の回らなかったWEBやPVなどを他の人が担当してくれてとてもありがたかった。
わたしは専門的な分野に自信がなく班員と比べて劣っていて作業に積極的に参加できなかった。
その分ドキュメントマネージャーとしてドキュメントの整理や議事録の作成、ポスター作りなどを進んでやることができた。
製品作りは技術とともに情報をうまく共有することや記録をきちんと残すことが大切だということが学べた。