| 名称 |
MIRS2202メカニクス開発完了報告書 |
| 番号 |
MIRS2202-MECH-0012 |
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2023.02.21 |
畠山佑紀,冨永悠陽 |
青木悠祐 |
初版 |
目次
1.はじめに
2.全体概要
3.各部の評価
3-1.最下段
3-2.昇降用インナーフレーム
3-3.外装・回路用アウターフレーム
3-4.上面パネル
4.各パートへのリンク
1.はじめに
本ドキュメントは本ドキュメントは、MIRS2202 NASUBI Projectのメカ班の開発完了報告書について示すものである。
2.全体概要
以下にNASUBIの全体図を示す。
図1.全体図1
図2.全体図2
以下に主なスペックを示す。
〇サイズ
直径:480mm
高さ
最大展開時:1220mm
最小格納時:840mm
〇重量
13.0kg
サイズと重量に関しての評価を述べる。
〇最大高さについて
最大展開高さは1220mmとなった。この高さについて、自分たち高専生としては触りやすく非常に良い高さであった。しかしながら病院という環境において、年配者や子供が使用することを考えると少し高かったように思える。
後述するが、予定通り昇降にサーボモーターを用いることができていれば、自由に高さを決定することができ、この問題は解決できるはずである。
〇最小高さについて
最小格納高さは840mmとなった。もともと格納という機能は、重たい上部機構を搭載しつつ安定して走行するために搭載されたものである。
走行に関して、最大展開時と最小格納時を比較した。最大展開時では走行時に大きな揺れが起き安定した走行ができなかったのに対し、最小格納時では走行時に目立った揺れ等は確認できず、安定した走行をしていた。以上より、この設計は間違っていなかったといえる。
〇重量について
機体重量は13.0kgとなった。これについて他班と比較すると平均的なものだったといえる。しかしながら、後述するようなパーツや足回りのモーターマウントパーツの割れを引き起こしてしまったことを考えると、もう少し軽量化に対して力を入れるべきだったといえる。
具体的には、昇降機構に大量に用いたMISUMIフレームをより軽量なフレームに置き換えるべきであると考える。
3.各部の評価
3.1最下段
以下に機体最下段の全体写真を示す。
図3.最下段
○サスペンション
以下にサスペンションの図を示す。
図4.サスペンション
これは標準機を社会実装先のファルマバレーセンターに持ち込み実装試験をした際、接地性の悪さから走行が出来なかったことを理由に設計された。
これを搭載することで接地性が改善され、最終的にファルマバレーセンターでの走行を行った際スムーズに行うことが出来たため、効果があると言える。
3Dプリンタ製のマウントパーツと中型のキャスター、m3*30mmねじとスペーサ、そしてばねによって構成される。
問題点として、ばねの選定にミスがあり、走行時に大きな揺れを起こしてしまうという不具合が発生した。
これの解決として、ナットの締めの強さによってばねの強さを変更できるようにした。
3.2昇降用インナーフレーム
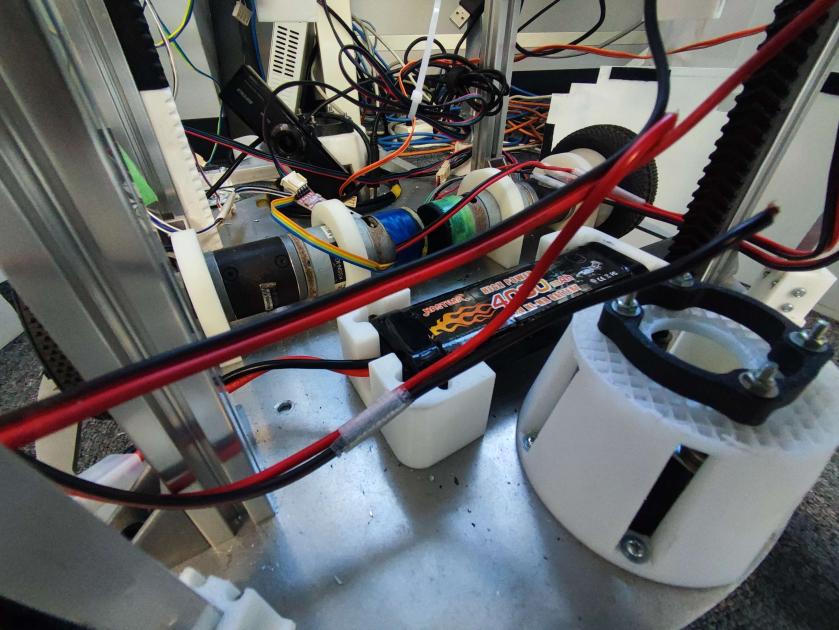
以下に昇降用インナーフレームの全体写真を示す。
図5.インナーフレーム
○ラックアンドピニオン
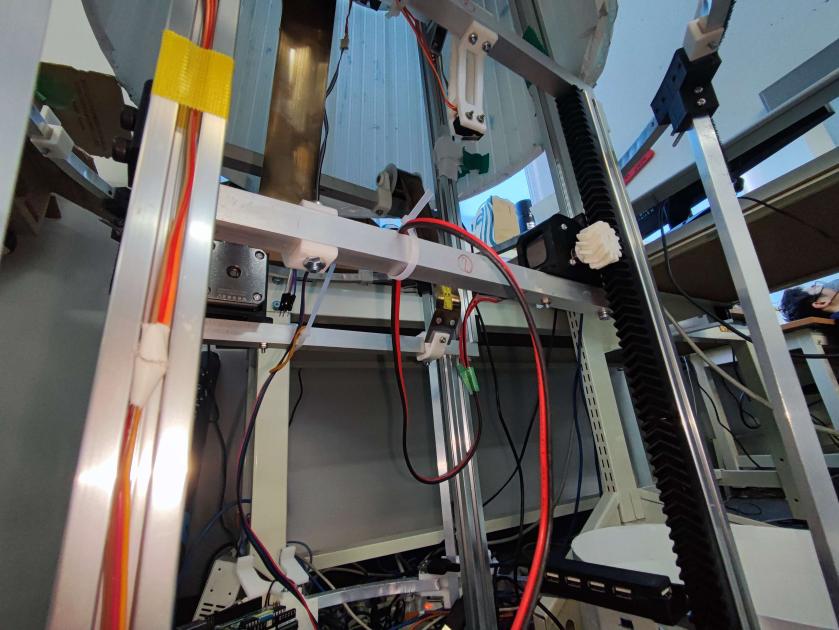
以下にラックアンドピニオンの図を示す。
図6.ラックアンドピニオン
ラックアンドピニオンの製作はフル3Dプリンタ製とした。割れや滑り、騒音対策でやまば歯車といわれる形状を採用した。
これにより、スラスト方向の力によるピニオンのずれを抑止でき、モータとピニオンの固定がやりやすくなった。
また、作業中及び試験中一度もギアの割れが起きることはなく、安定した駆動を実現できた。
以上より、この設計は間違っていなかったといえる。
以下にピニオンの図を示す。
図7.ピニオン
ピニオンにはナットを埋め込めるようになっている。モータの軸のDカットとかみ合い、空転を防いでいる。
削れて空転してしまうことを予想しいくつか予備を作成したが、一度も空転を起こすことはなかった。これより、この設計は間違っていなかったといえる。
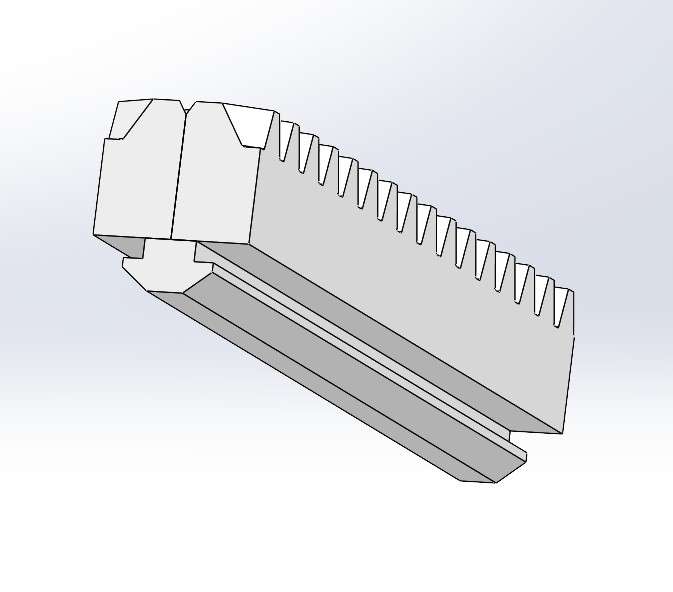
以下にラックの図を示す。
図8.ラック
ラックにはMISUMIフレームの溝にかみ合うような突起をつけている。
これを機体に固定されている方のMISUMIフレームに挿入することで固定している。
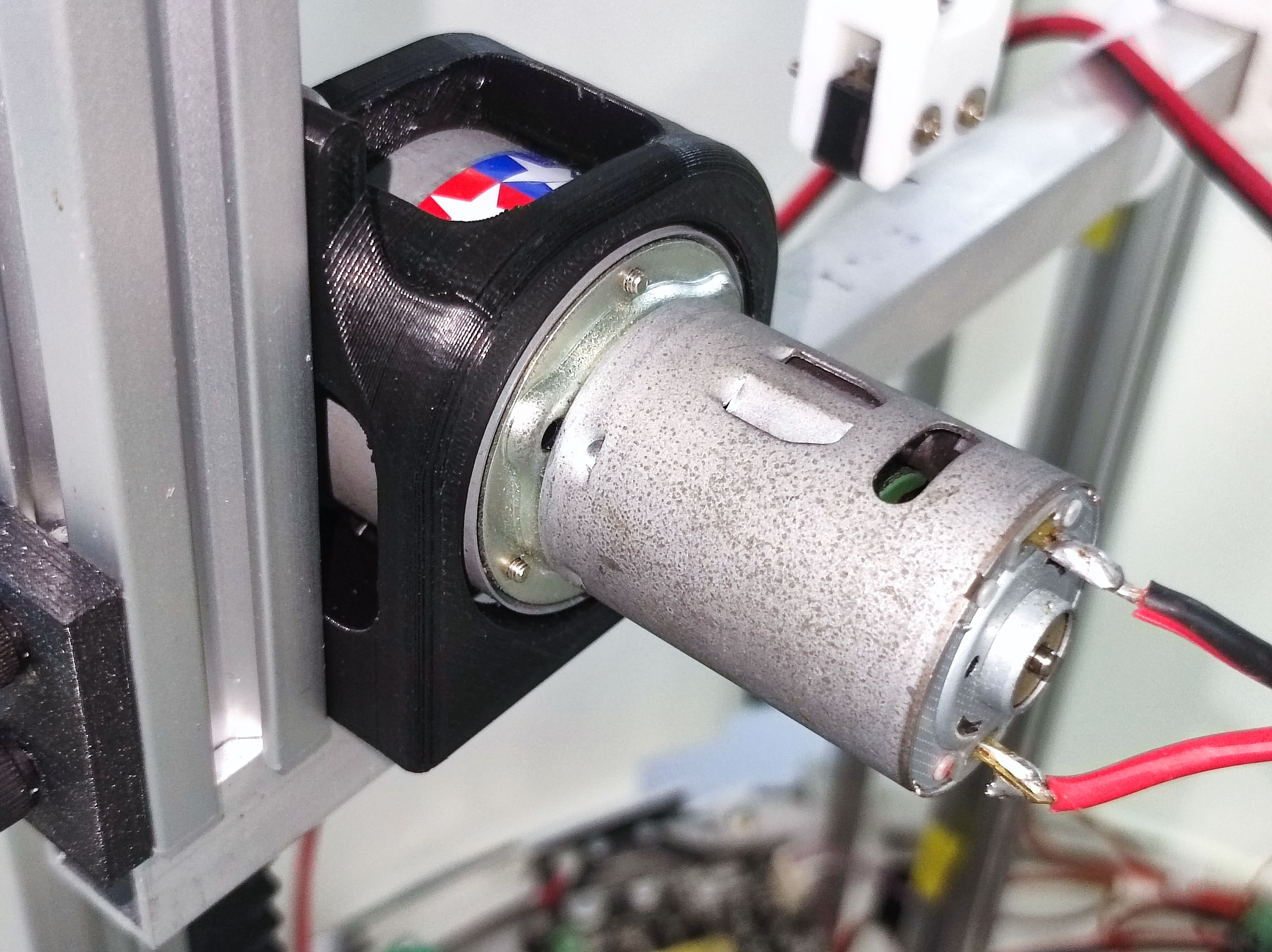
以下にDCモータマウントを示す。
図9.DCモータマウント
これを介してモータをMISUMIフレームとアルミ角パイプに固定している。
本来はステッピングモータをフレームに対して対角に配置し昇降させるつもりであったが、トルクが足らず動かなかったため急遽DCモータに変更した。
しかしこのモータにはエンコーダがついておらず、対角に2つつけた場合同期が取れず昇降に差が起きてしまう恐れがあった。
そのためバランスを引き換えにモータを一つに減らしている。
結果的にスムーズに昇降を行うことができたため、この設計は間違っていなかったといえる。
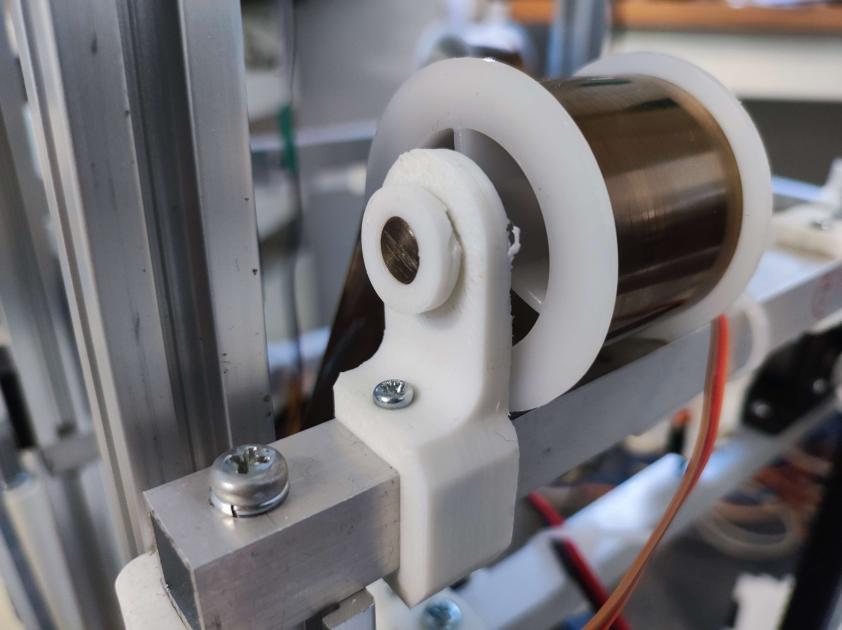
○定加重ばねを用いたカウンターウェイト
以下にカウンターウェイトの図を示す。
図10.カウンターウェイト
以下にカウンターウェイト本体マウントパーツを示す。
図11.マウントパーツ
これをアルミ角パイプに固定しジャンク品の金属製6mm丸棒を通すことで、カウンターウェイト用定加重ばねを固定する。
幸い割れ等事故は起きなかったが、もう少しパーツに厚さを持たせたり、充填率を高くすべきだったと反省している。
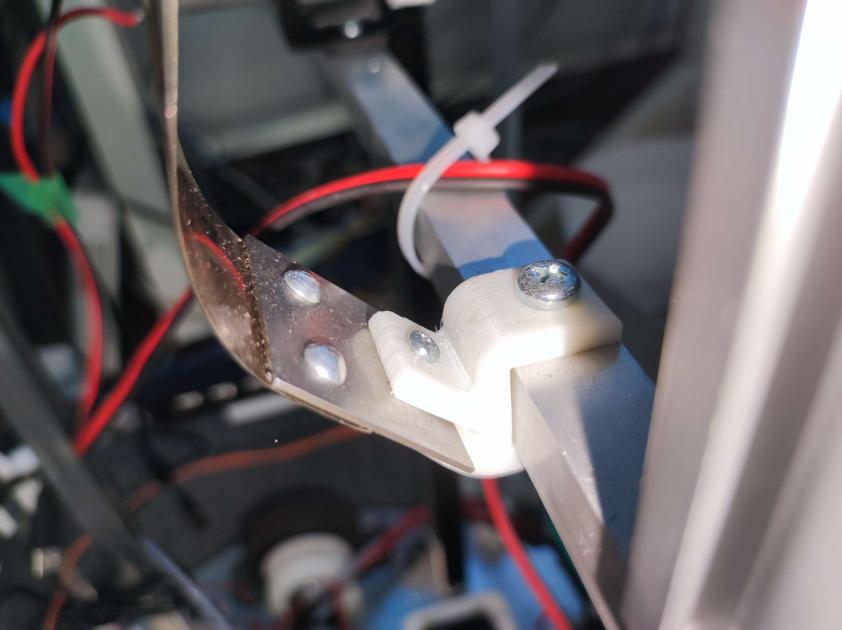
以下にカウンターウェイト下部固定パーツを示す。
図12.下部固定パーツ
これをアルミ角パイプに固定し、先端の隙間に定荷重ばねの先端を差し込みm3ねじで固定することで、カウンターウェイトを働かせることが出来る。
これも上記パーツ同様、幸い割れ等事故は起きなかったが何らかの対策はすべきだったと反省している。
3.3外装/回路用アウターフレーム
以下にアウターフレームの画像を示す。
図13.アウターフレーム
縦方向のフレームは10mm*10mmアルミ角パイプである。外側に約5度傾いている。これは外装を美しく見せるためである。
横方向のフレームは10mm*10mmアルミ角パイプである。これに曲げ加工を加え、円形になるようにしている。
傾きや曲げを加えた影響で、3Dプリンタパーツにうまくはまらなくなる不具合が多少発生した。
加工練度の低さが影響したといえる。
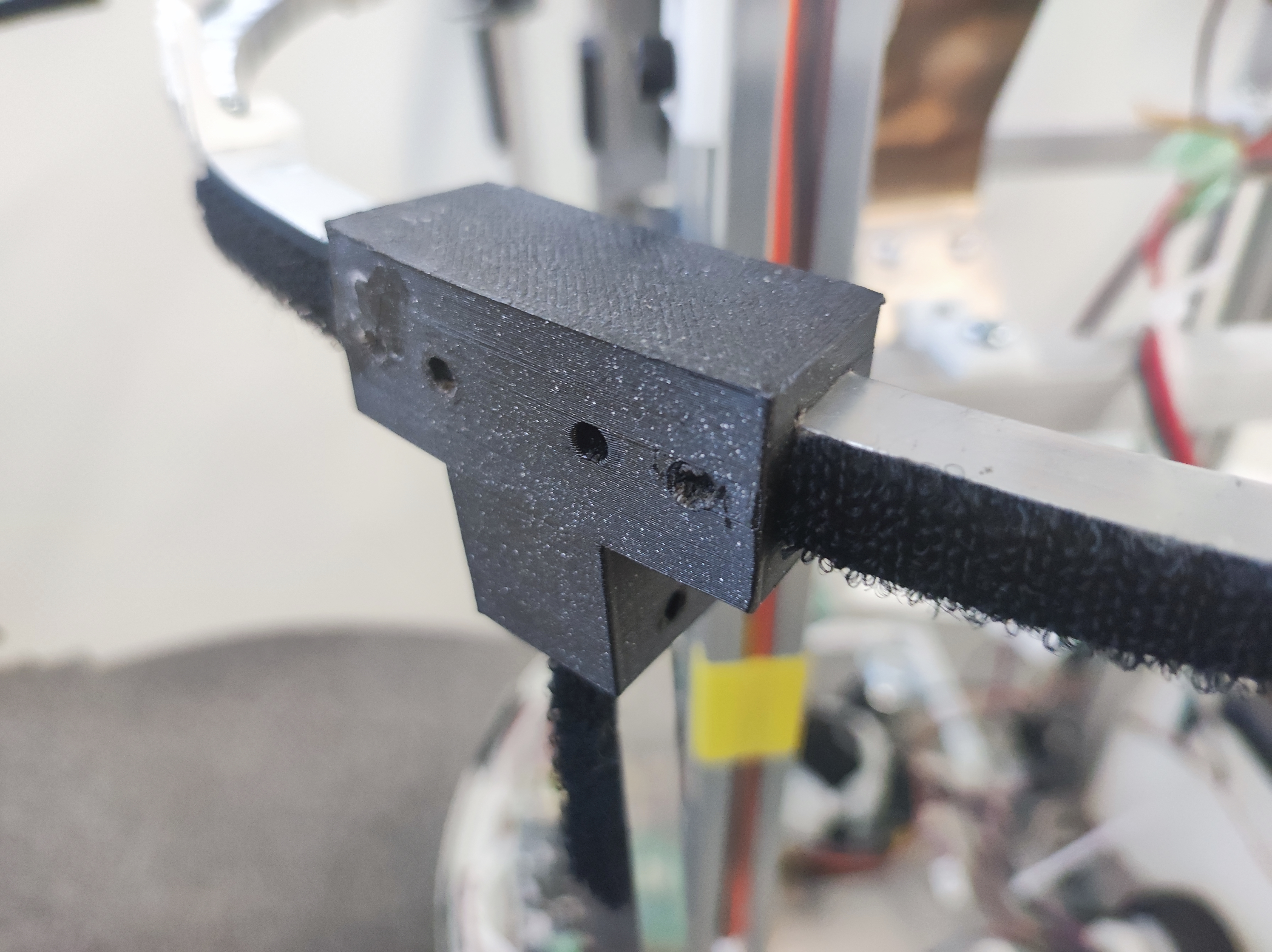
○フレーム接続部
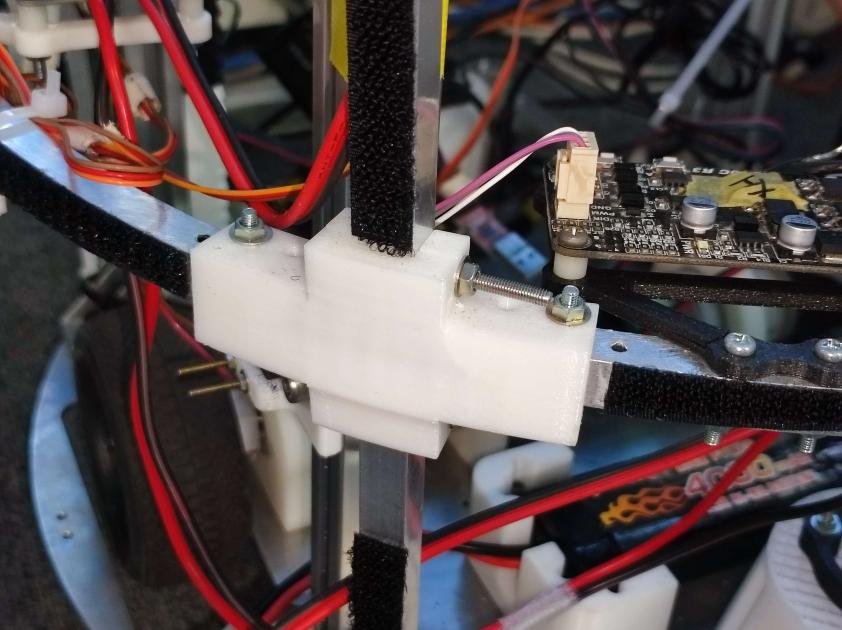
以下にフレーム接続部を示す。
図14.接合部上段
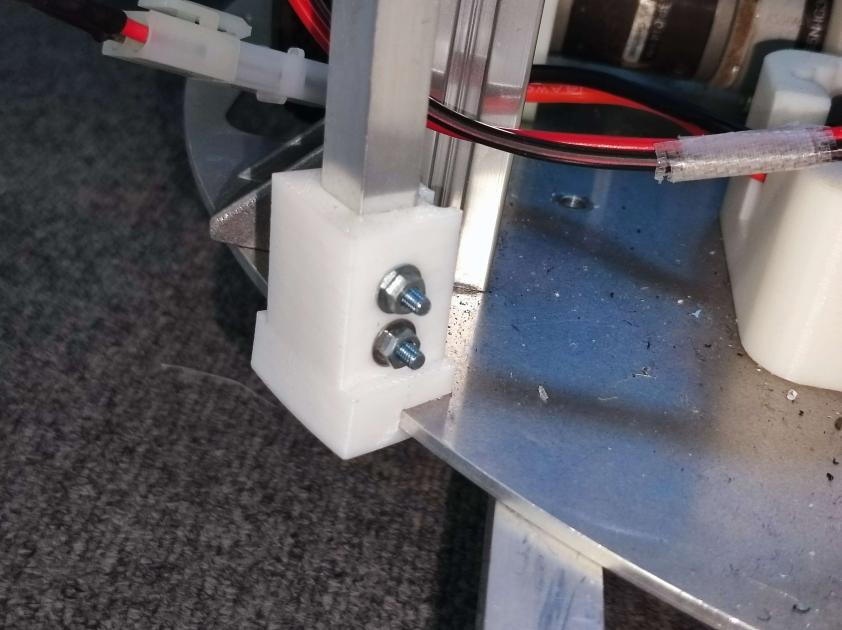
図15.接合部中段
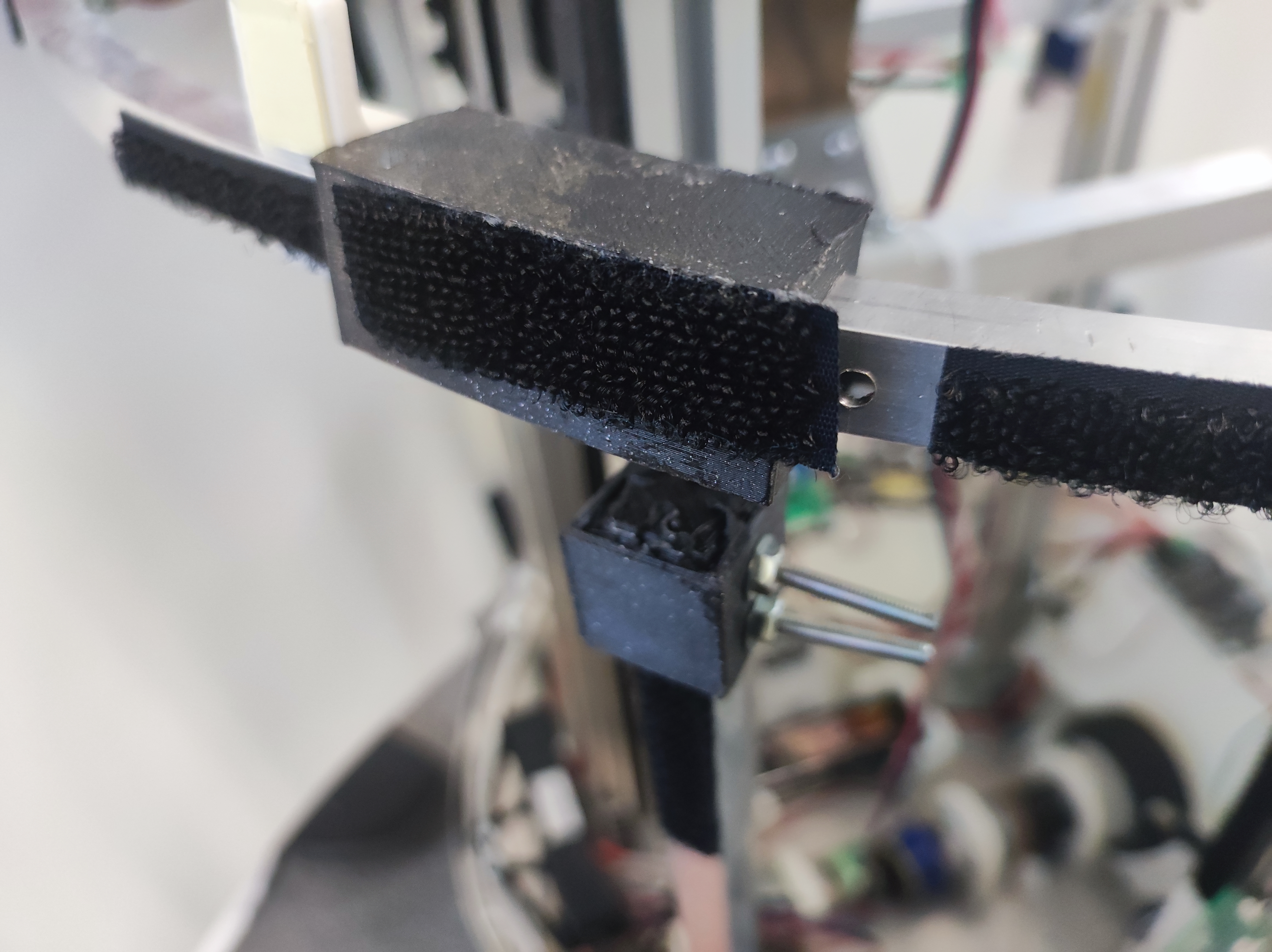
図16.接合部下段
接続パーツはすべて3Dプリンタ製である。
約5度傾いている縦方向のフレームに対し、横方向のフレームは水平になるように設計されてる。
これは横方向のフレームに回路を取り付けたりセンサを取り付けたりするためである。
以下に割れた上段接続パーツを示す。
図17.破損した接続パーツ
これは本体を移動させる際、アウターフレームの上段のみを持ったことにより破損したパーツである。
このパーツはもとから機体重量を支えるように設計されていない。しかし機体を運ぶ際最も持ちやすい場所にある。
以上より、この破損は想定できるものであったと考えられる。
対策としては、最初から持つことを想定して強度を増加させたり、アウターフレームを持ってしまわないように別の持ち手をつけたりすることが挙げられる。
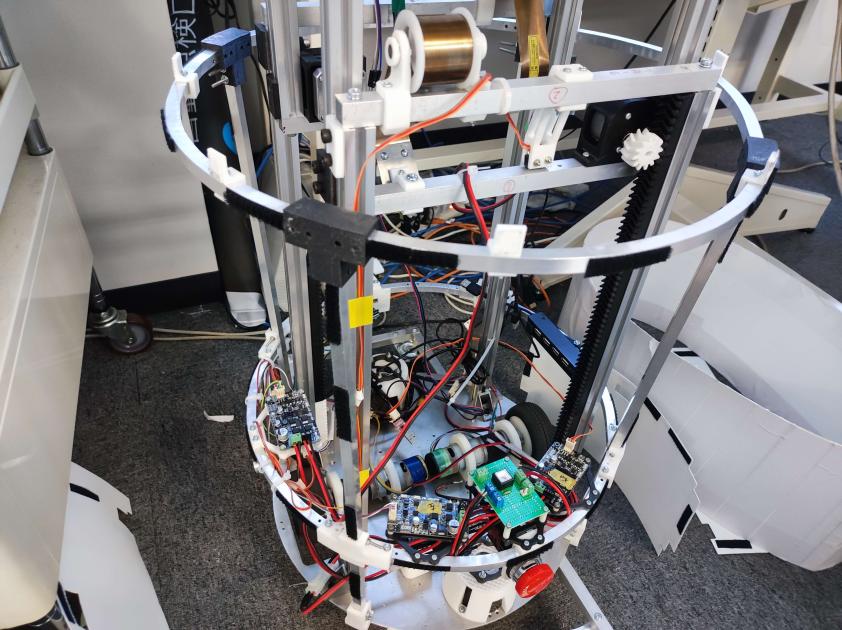
○回路スペース
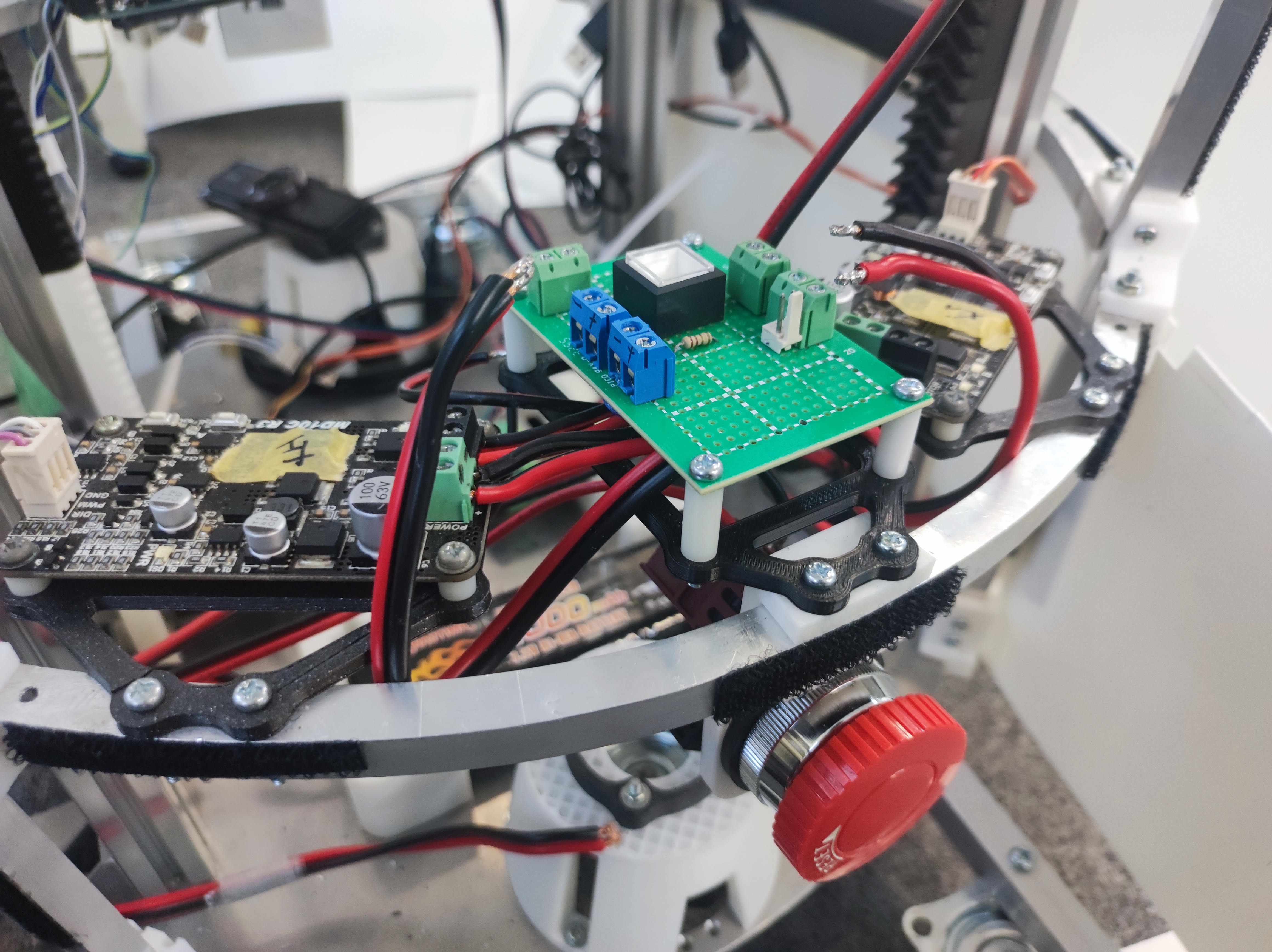
以下にアウターフレームに設けられた回路スペースを示す。
図18.回路スペース
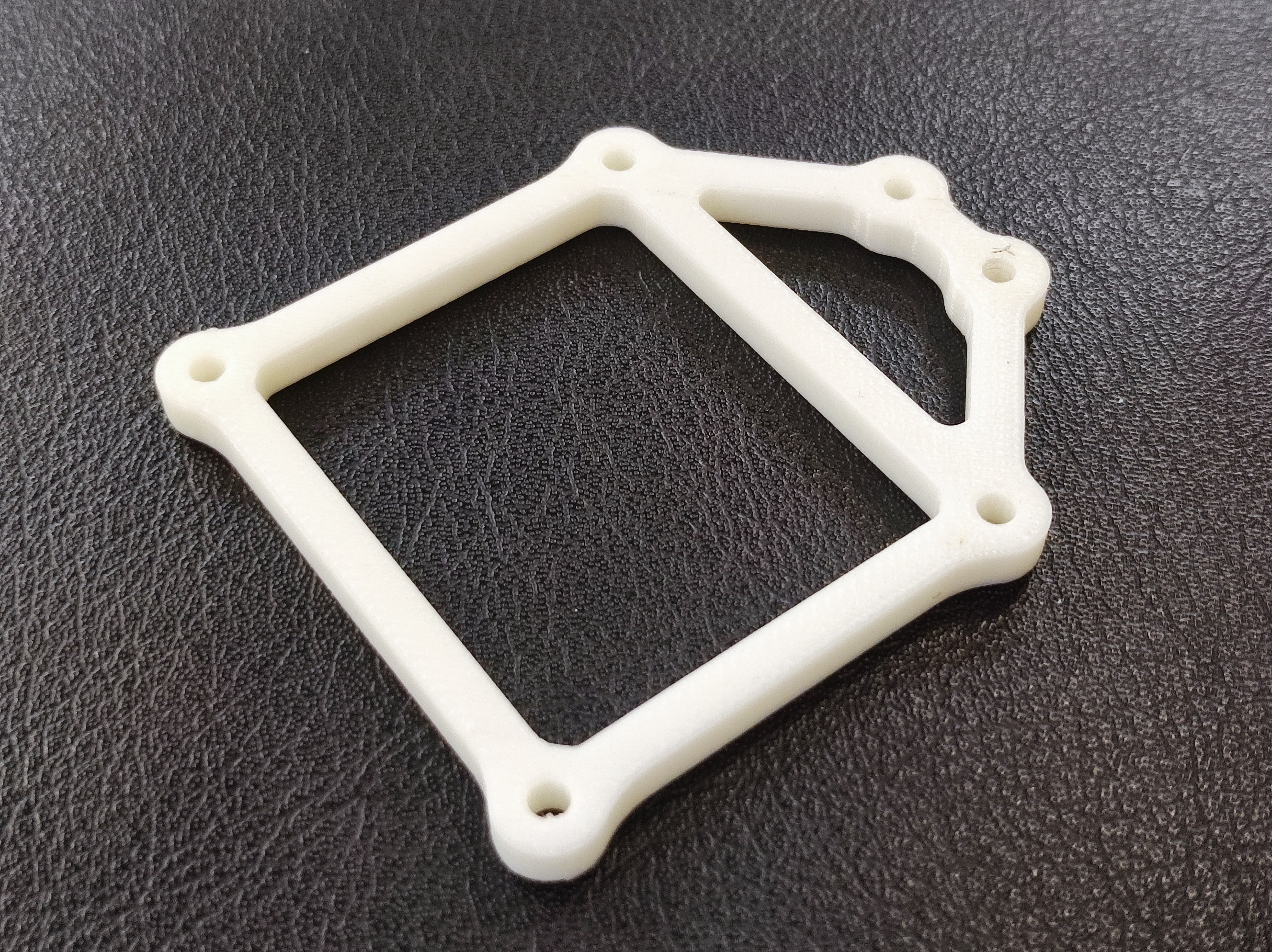
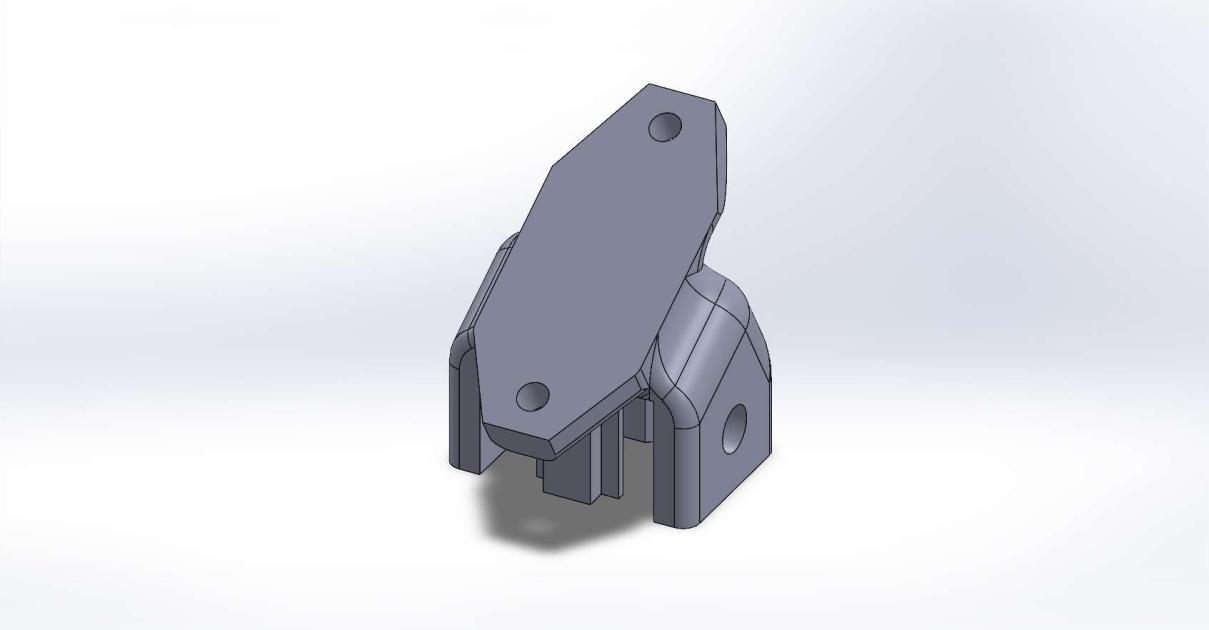
以下に回路基盤とフレームを接続するためのパーツを示す。
図19.回路固定パーツ
このロボットには昇降機構が組み込まれている関係で、回路スペースが非常に狭くなってしまった。
そのためアウターフレームに固定し、浮かせる方式を採用した。
これにより、基盤自体をロボット本体から取り外すことが簡単に行うことが出来た。一方で、耐久性や配線に問題が生じた。
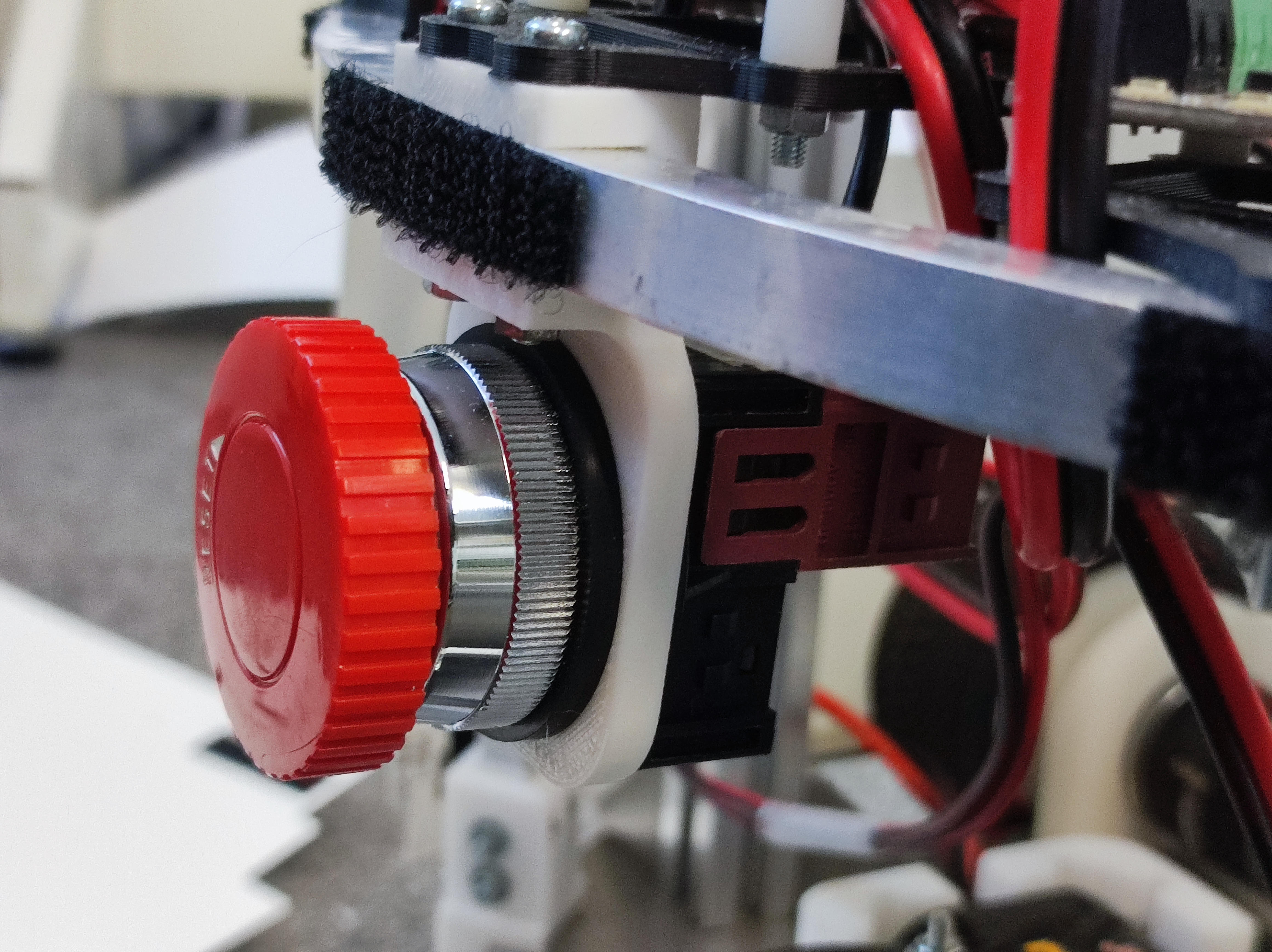
以下に回路とフレームの接続部を示す。
図20.緊急停止ボタンマウント
回路を固定するためのフレームの穴は緊急停止ボタンマウントやカメラマウント、今回は使われなかったが超音波センサマウントと共通になっており、加工点数の削減を図ることが出来た。
○外装固定部
以下に外装固定部を示す。
図21.外装固定部
外装にはPPシートを用いた。
アウターフレームとの接続はマジックテープを利用し、取り外しが容易になるようにしている。
これにより、回路スペースやインナーフレームへのアクセスがしやすくなり、作業効率が上がった。
3.4上面パネル
以下に上面パネルの全体図を示す。
図22.上面パネル
○フレーム固定部
以下にフレームとアクリル板を固定するパーツを示す。
図23.アクリル板固定部
3Dプリンタ製である。
フレームに対してアクリル板を30度傾けられるようになっている。
下部の突起をMISUMIフレームの溝に挿入し、M5ボルトナットで固定することで、アクリル板とフレームの固定を実現している。
○タブレット固定パーツ
以下にタブレットを固定するパーツを示す。
図24.タブレット固定パーツ
M3ねじでアクリル板と固定できるようになっている。
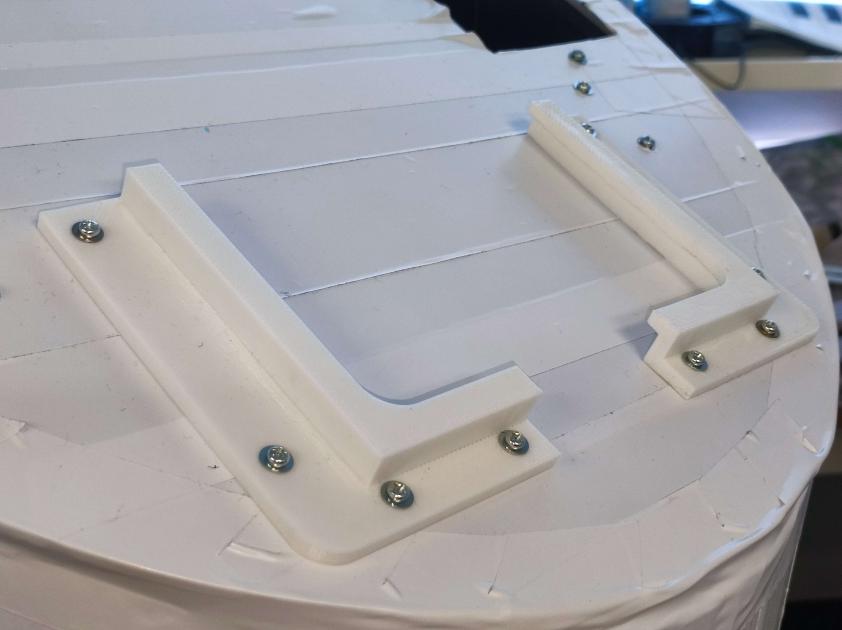
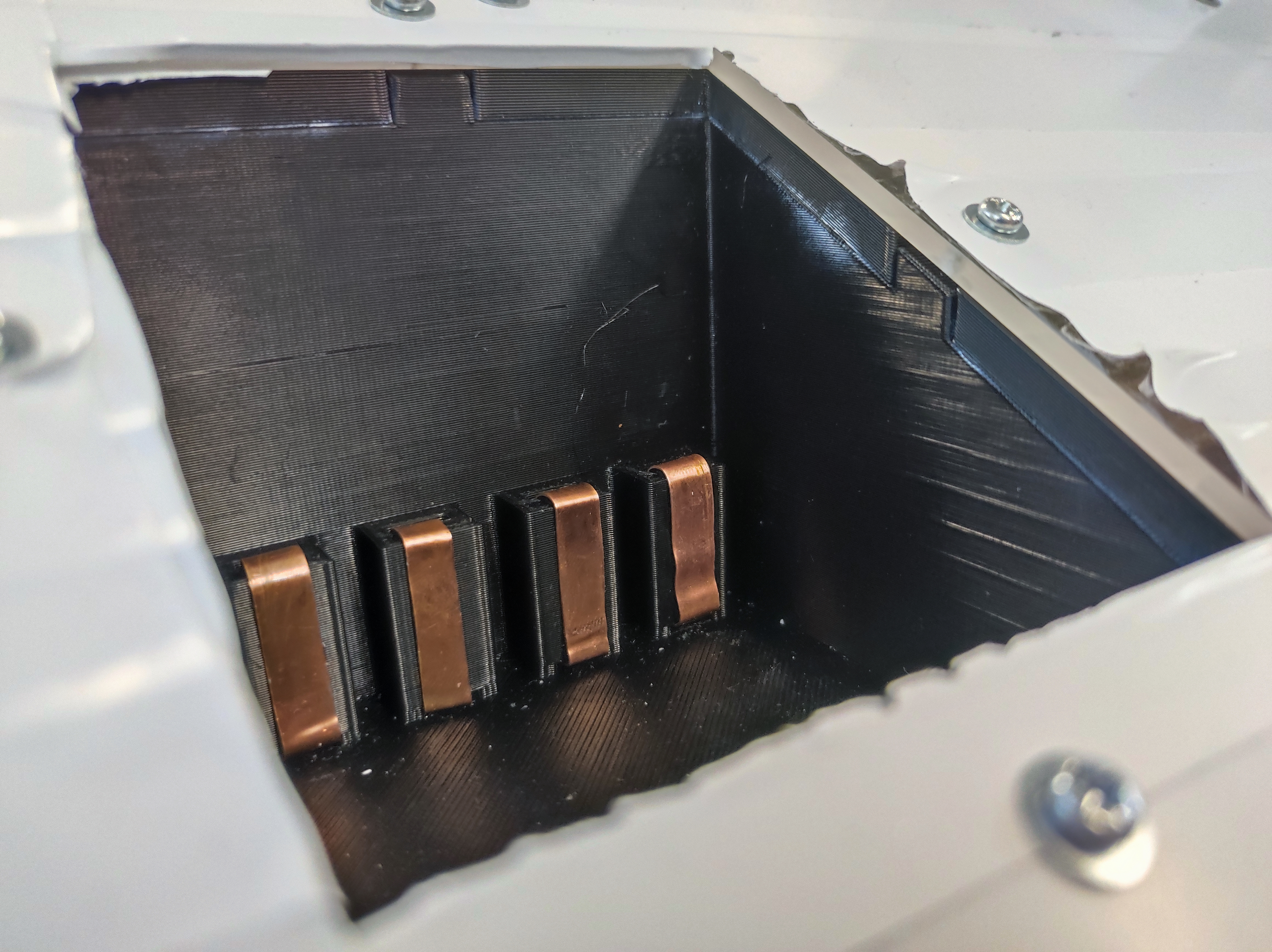
○モジュールソケット
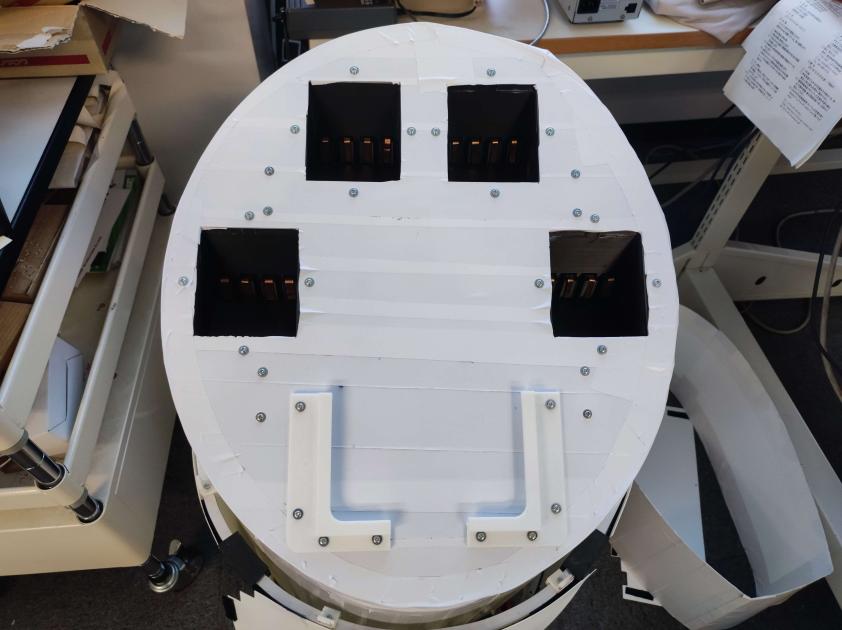
以下にモジュールソケットパーツを示す。
図25.モジュールソケット
4つの突起部分に銅板を取り付け、端子としている。
モジュール本体の寸法とソケット内部の寸法をギリギリまで近づけることで、すきまばめの要領で固定している。
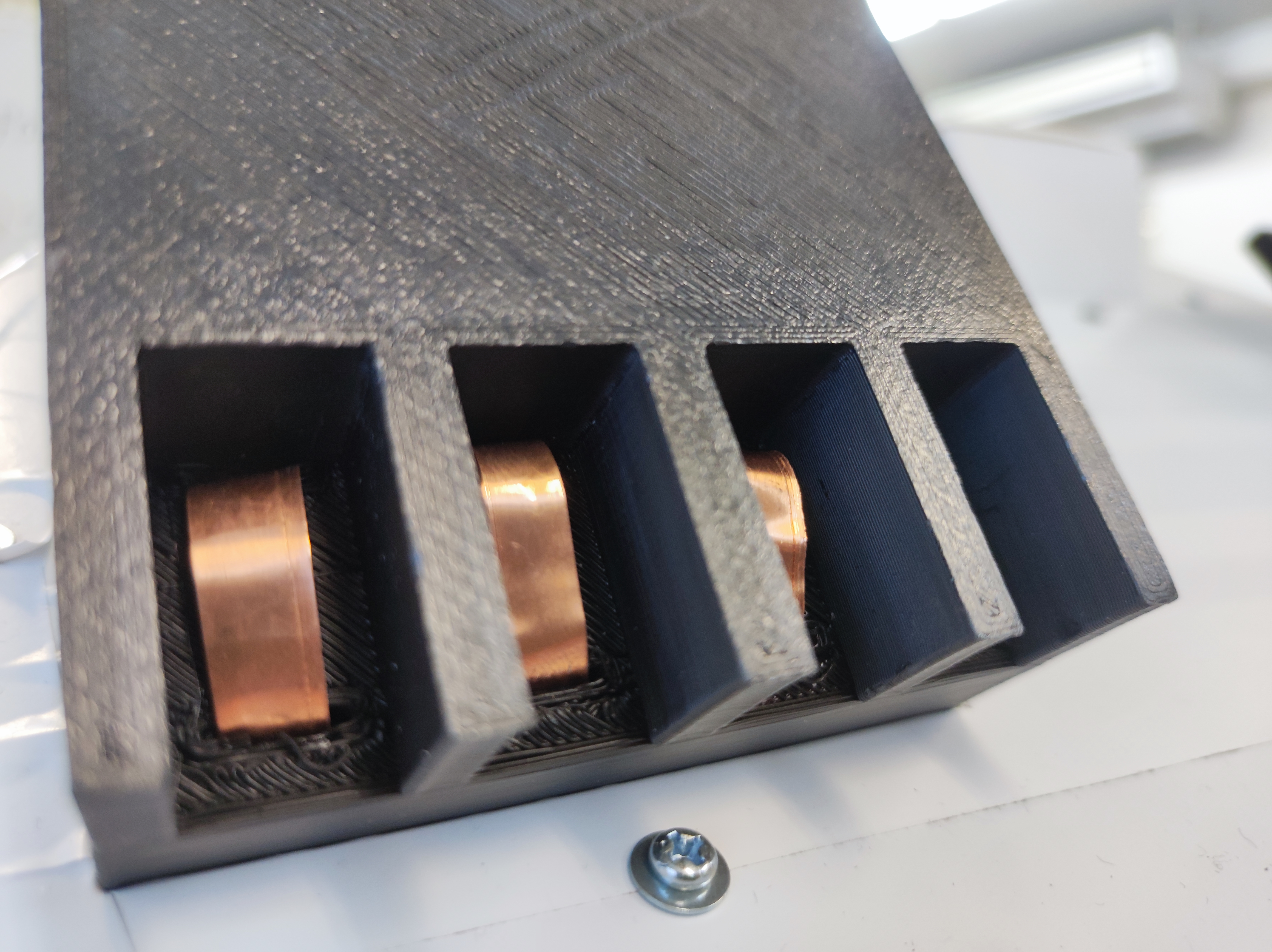
○モジュール
以下にモジュールを示す。
図26.モジュール
モジュール内部については、エレキ開発報告書を参照する。
4つのへこみに銅板を取り付け、端子にしている。
接続方式や通信等に関しては、エレキ開発報告書を参照する。
4.各パートへのリンク
MIRS2202 開発完了報告書
MIRS2202 開発完了報告書(エレクトロニクス)
MIRS2202 開発完了報告書(ソフトウェア)
MIRS2202ドキュメント管理台帳へ