
図1 動作フローチャート

| 名称 | MIRS2102ソフトウェア基本設計書 |
|---|---|
| 番号 | MIRS2102-DSGN-0006 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2021.10.04 | 熊切雄之助 | 初版 | |
| A02 | 2021.10.08 | 熊切雄之助 | 小谷進 | 第2版 |
| 機能 | 詳細 |
|---|---|
| 衝突回避 | 超音波センサで前方の障害物との距離を測り衝突を回避する |
| 画像認識 | 機械学習によってカメラの映像からマーカーを認識する |
| 除草機能 | 除草用モータを回転させ、除草剤を撒く |
| 播種機能 | 播種をする場所に移動し、播種用のモータを回転させる |
| webアプリとの連携 | webアプリからの入力を受け取り、それにあった操作をする |

| モジュール名 | 概要 |
|---|---|
| Pilot | 初期操作を行う |
| direction | 正対補正を行う |
| position | 自己座標の取得を行う |
| camera_reco | 画像認識を行う |
| uss | 超音波センサの読み取りを行う |
| io | GPIOの読み取りを行う |
| request | Arduinoへの命令を行う |
| arduino | Arduinoとのシリアル通信を行う |
| app_ctrl | webアプリとの通信を行い、FUTABA本体に指示を送る |
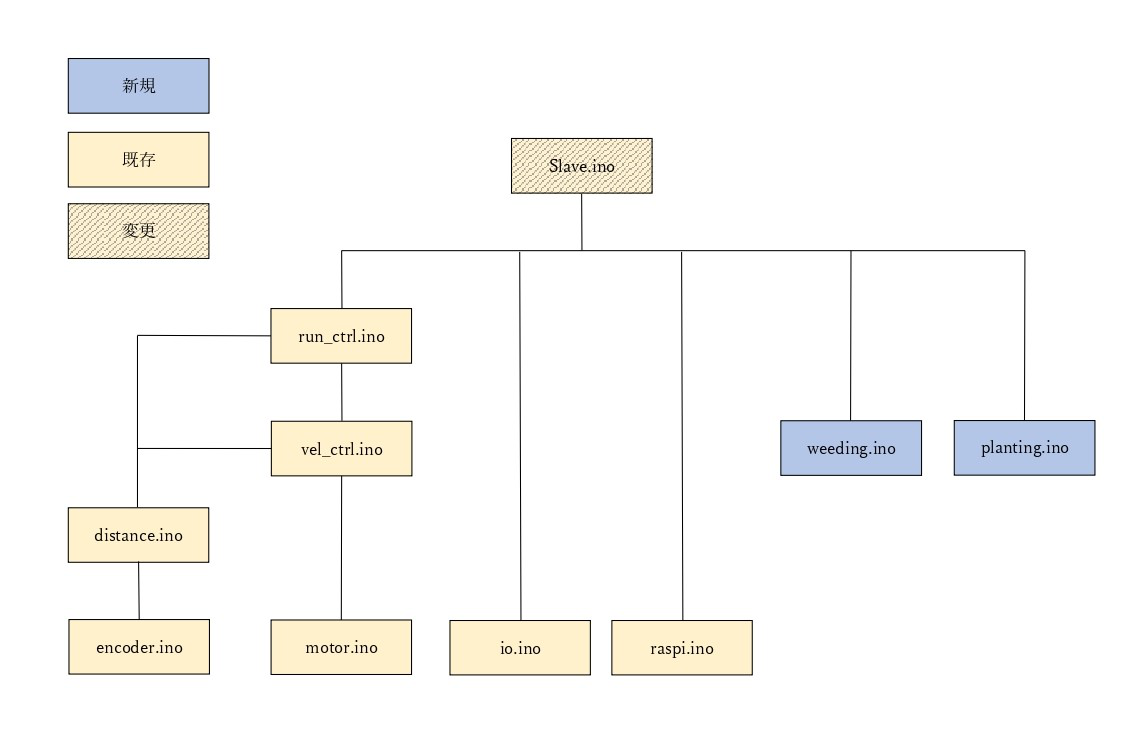
| モジュール名 | 概要 |
|---|---|
| Slave | RaspberryPi との通信、走行制御を一定周期で行う |
| run_ctrl | 走行制御を行う |
| io | 各種デバイスのピン設定と状態の取得を行う |
| raspi | Raspberry Piとシリアル通信を行う |
| distance | 走行距離の取得をする |
| motor | モータを操作する |
| encoder | エンコーダの読み取りを行う |
| weeding | 除草用モータの制御を行う |
| planting | 播種用モータの制御を行う |