| 名称 |
MIRS1904 基本設計提案書(メカ) |
| 番号 |
MIRS1904-DSGN-0003 |
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2019.10.23 |
杉山七海 |
|
初版 |
ドキュメント内目次
1.はじめに
本ドキュメントはMIRS1904のドキュメントである。
2.全体構造図
今回製作するロボットの全体構造図をFig.1として以下に示す。
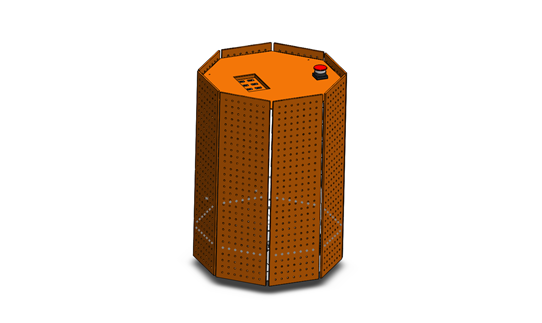
Fig.1 全体構造図
3.本体各部の名称
本体の各部名称をFig.2 に示す.
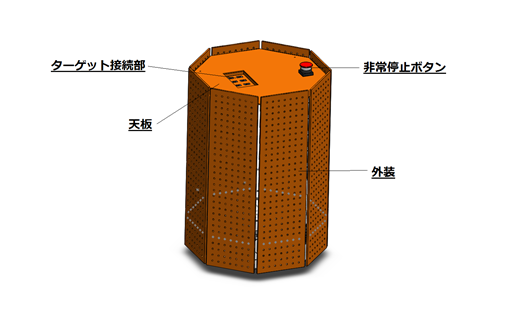
Fig.2 各部名称
4.付属品構造図
ポインタ構造図
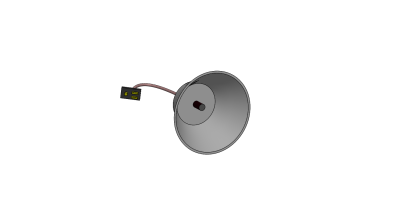
Fig.3 ポインタイメージ図
シューター構造図

Fig.4 シューターイメージ図
5.主要サイズ
直径は標準機と同じ400mm
高さを小学校低学年の慎重にあわせた600mmとする
6.製作品の概要
各パーツの加工方法をTable.1に示す。
Table.1 各パーツの加工方法
| パーツ名 |
個数 |
使用用途 |
加工方法 |
| 長方形ベニヤ板 |
8 |
外装用 |
レーザー加工機 |
| 円形ベニヤ板 |
1 |
天板用 |
レーザー加工機 |
| ポインタ用センサマウント |
6 |
受光センサを固定 |
3Dプリンタで製作 |
| シューター用外装 |
2 |
赤外線LEDの保護、外装用 |
段ボールを加工 |
| 400mmアクリル支柱 |
4 |
支柱 |
タップ加工 |
基本設計(全体)
基本設計(エレキ)
基本設計(ソフト)
MIRS DATABASE