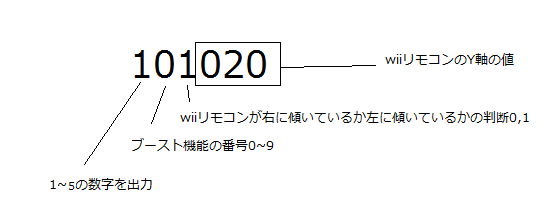
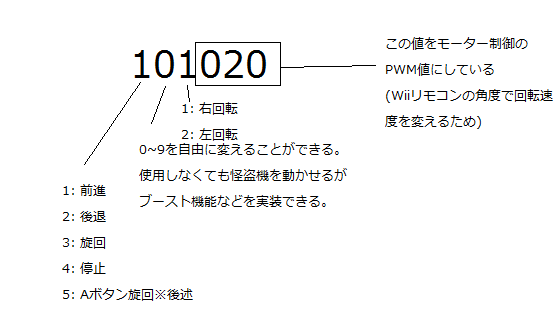
傑偢丄夦搻婡偼埲壓偺恾偺傛偆側僀儊乕僕偱惂屼偝傟偰偄傞丅
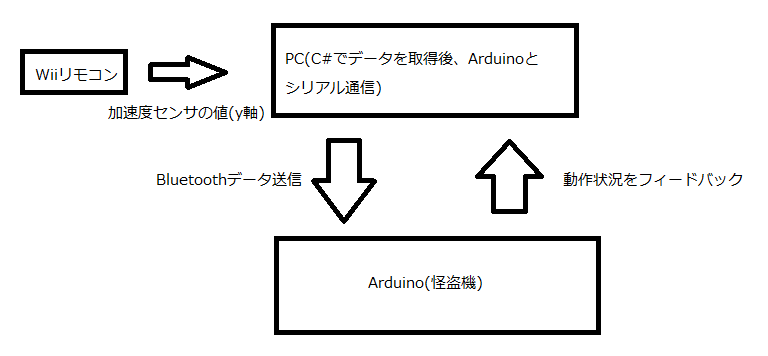
3.1Wii儕儌僐儞偲PC偺愙懕
wii儕儌僐儞偲PC偼Bluetooth偱偮側偖偙偲偑偱傞丅
傑偢丄PC偱Bluetooth偺夋柺傪奐偔丅乮windows偺応崌偼僞僗僋僶乕偺抂偭偙偺偲偙傠偵昞帵偝傟偰傞偲巚偄傑偡丅乯
Wii儕儌僐儞偺1,2儃僞儞傪楢懪偟側偑傜僨僶僀僗偺専嶕傪墴偡丅
Wii儕儌僐儞偺僨僶僀僗偑昞帵偝傟偨傜(僐儘儞:偱嬫愗傜傟偰傞僎乕儉僐儞僩儘乕儔偲昞帵偝傟偰偄傞傗偮偱偡丅)僨僶僀僗傪僋儕僢僋偡傞丅
愙懕偲偄偆崁栚偑偁傞偺偱乮昞帵偝傟側偄応崌偼僨僶僀僗偑昞帵偝傟偰傞夋柺傑偱栠偭偰wii儕儌僐儞偺1,2傪墴偟側偑傜僨僶僀僗偺偲偙傠傪僋儕僢僋偟偰偔偩偝偄丅乯Wii儕儌僐儞偺1,2儃僞儞傪墴偟側偑傜僋儕僢僋偡傞丅
愙懕偲偄偆崁栚偑愗抐偵曄傢偭偨傜愙懕惉岟丅愙懕屻偼LED偑揰柵偟懕偗傞丅偲傔偨偄応崌偼師崁嶲徠偺WiimoteTest.exe傪婲摦偡傞丅
3.2WiimoteLib偺摫擖
摫擖屻丄WiimoteLib僼僅儖僟撪偵偁傞WiimoteTest.exe僼傽僀儖偼Wii儕儌僐儞偺LED摍傪惂屼偡傞傕偺偱偁傞丅
3.3C#丄Arduino偺摫擖
C#傊偺wiimoteLib幚憰偺巇曽偼,WiimoteLib C#偺傛偆偵専嶕偡傟偽偱偰偔傞偺偱偙偙偱偼妱垽偡傞丅
仸偒偪傫偲傗偭偰偄傞偺偵偆傑偔抣偑庢摼偱偒側偄応崌偼WiimoteTest.exe傪婲摦偟偰偐傜幚峴偟偰傒偰偔偩偝偄丅
Arduino偺奐敪娐嫬偼僱僢僩偱専嶕偡傟偽僟僂儞儘乕僪偱偒傞丅
3.4PC偲Arduino偺Bluetooth愙懕
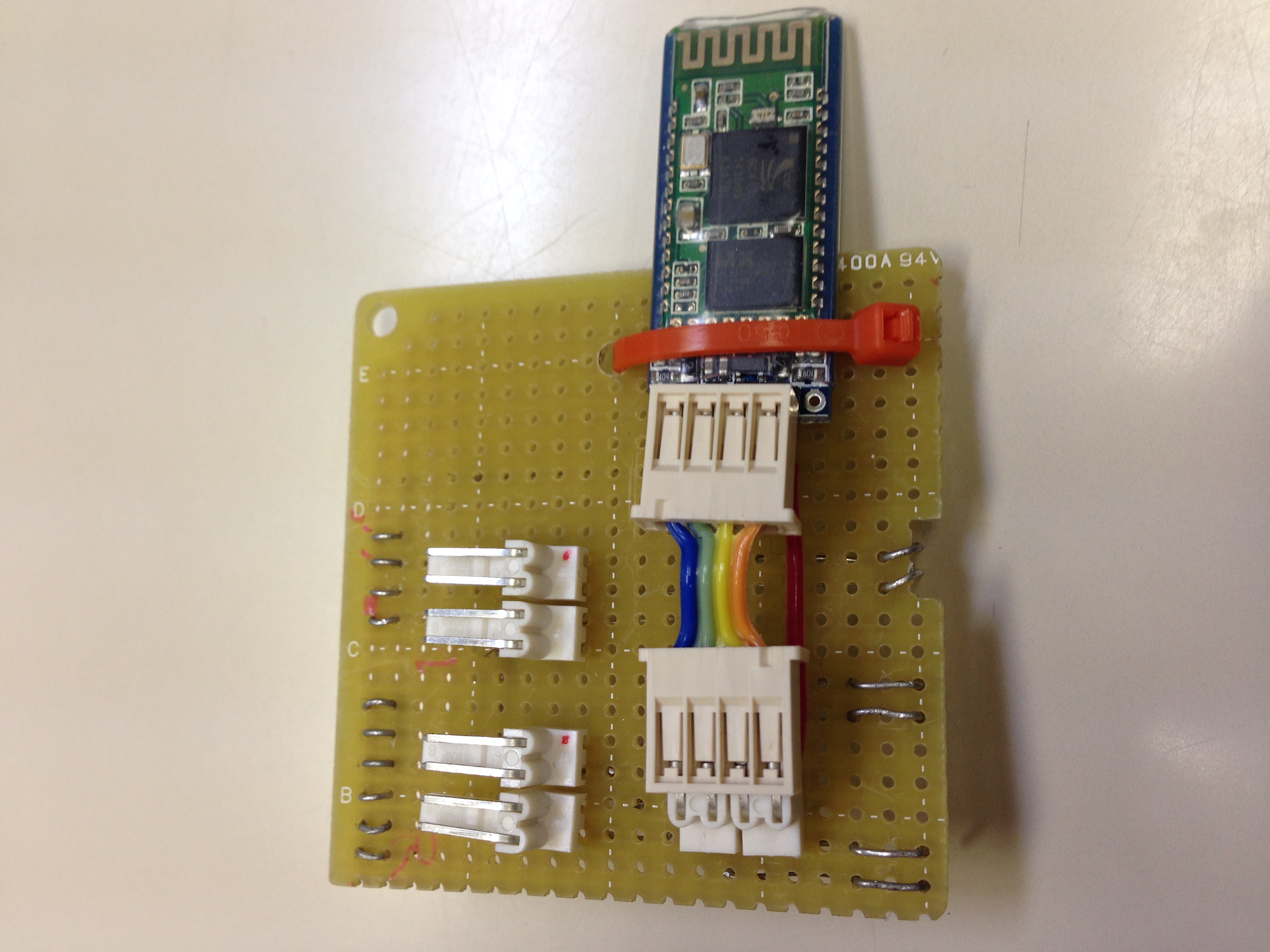
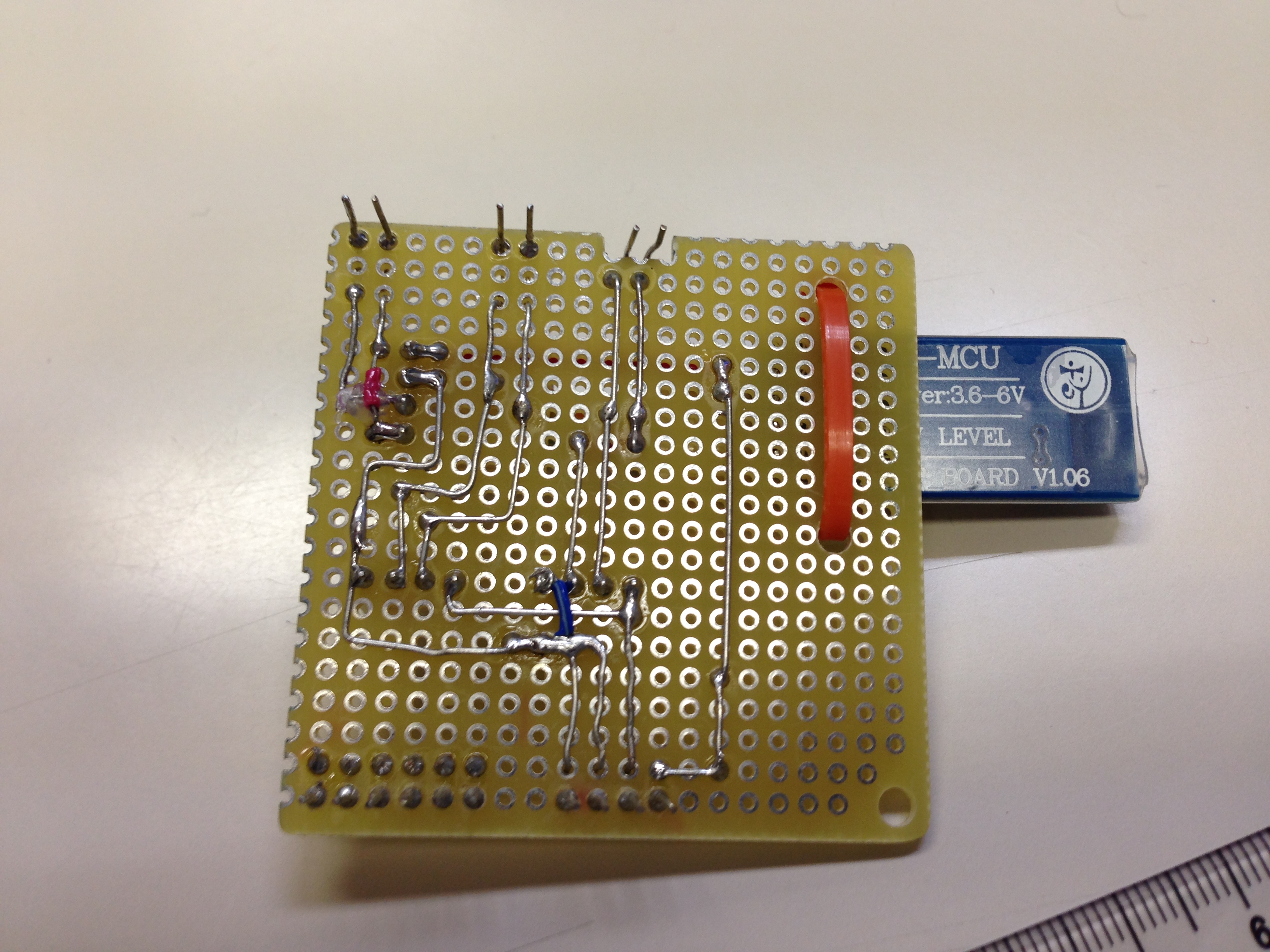
傑偢丄Arduino偲Arduino 儚僀儎儗僗柍慄僔儕傾儖捠怣Bluetooth module HC-06 4PIN乮埲壓丄HC-06乯偺愙懕偺巇曽傪帵偡丅
Arduino偲HC-06偺愙懕偼師偺昞偺捠傝偱偁傞丅
| HC-06懁 | Arduino懁 |
|---|---|
| Vcc | 3.3V |
| GND | GND |
| TXD | RXD |
| RXD | TXD |
HC-06偵揹尮偑擖傞偲愒偄岝偑揰柵偡傞丅
PC偲偮側偑偭偰偄傞偙偲偑妋擣偱偒傞娙扨側Arduino僾儘僌儔儉傪埲壓偵帵偡丅
void setup() {
Serial.begin(9600);
}
void loop() {
Serial.println("Hello");
delay(1000);
}
偙偺僾儘僌儔儉偼1昩偛偲偵Hello偲昞帵偡傞丅Teraterm摍偺僞乕儈僫儖僜僼僩傪婲摦偟丄HC-06偺COM傪妋擣偟丄捠怣懍搙傪偁傢偣傞偙偲偱Teraterm忋偵Hello偲昞帵偝傟傞丅
HC-06偺COM偼僨僶僀僗儅僱乕僕儍乕偱妋擣偱偒傞丅
捠怣懍搙偼Serial.begin(9600);偺9600偺偙偲丅
儁傾儕儞僌乮愙懕乯偵惉岟偡傞偲愒偄LED偑揰柵偐傜揰摂偵曄傢傞丅
3.5C#偱偺愙懕
SerialPort偺僾儘僷僥傿偐傜PortName傪Bluetooth偺COM偵崌傢偣傞丅
Timer偺僾儘僷僥傿偐傜Enable傪True偵偡傞丅
僂僀儞僪僂傪僟僽儖僋儕僢僋偡傞偲僐乕僪偵旘傇偺偱
serialPort1.Open();
偲婰擖偡傞丅
師偵Timer傪僟僽儖僋儕僢僋偟丄娭悢撪偵旘傇偺偱
timer1.Stop();
label1.Text=serialPort1.ReadLine();
timer1.Start();
偲婰擖偡傞丅
僨僶僢僋拞偵僾儘僌儔儉傪嵞搙幚峴偡傞偲億乕僩傪奐偗傑偣傫偲偐偄偆僄儔乕偑弌傗偑傞偺偱拲堄偡傞偙偲丅 double偐傜String傊宆曄姺偡傞偲偒偼埲壓偺僐乕僪傪巊偊偽椙偄
double a;
String data;
data = Convert.ToDouble(a).ToString();
徻偟偔偼6.僾儘僌儔儉偺僜乕僗僐乕僪傪嶲徠偟偰偔偩偝偄丅