はじめに
本ドキュメントは、MIRS1402の開発終了に伴うメカニクス関連の報告ドキュメントである。
製作部品リスト
MIRS1402の機体の製作に当たって以下のような部品の設計・部品の追加製作を行った。各部品ごとのドキュメントはリンクを参照。
・上段シャーシ
製作期間:2時間(ヤスリがけ含む)
⇒MIRS1402-MECH-0002---シャーシ詳細設計書
機体の軽量化、および回転シャーシに対応させるため上段シャーシを新規製作。
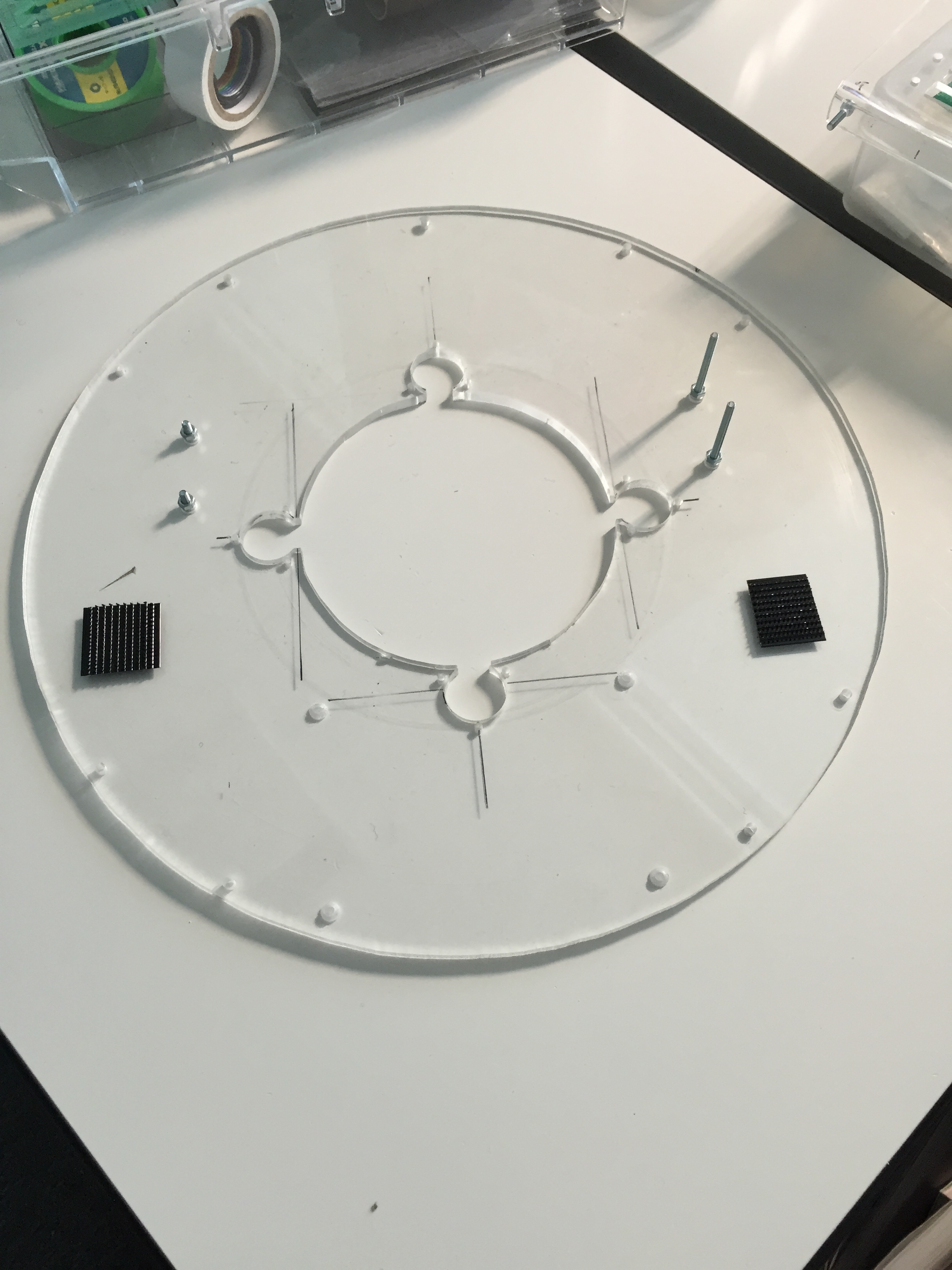
上段シャーシ
・中段シャーシ
製作時間:3時間(ヤスリがけ含む)
⇒MIRS1402-MECH-0002---シャーシ詳細設計書
機体の小型軽量化し、整備性を向上させるため中段シャーシを新規製作。
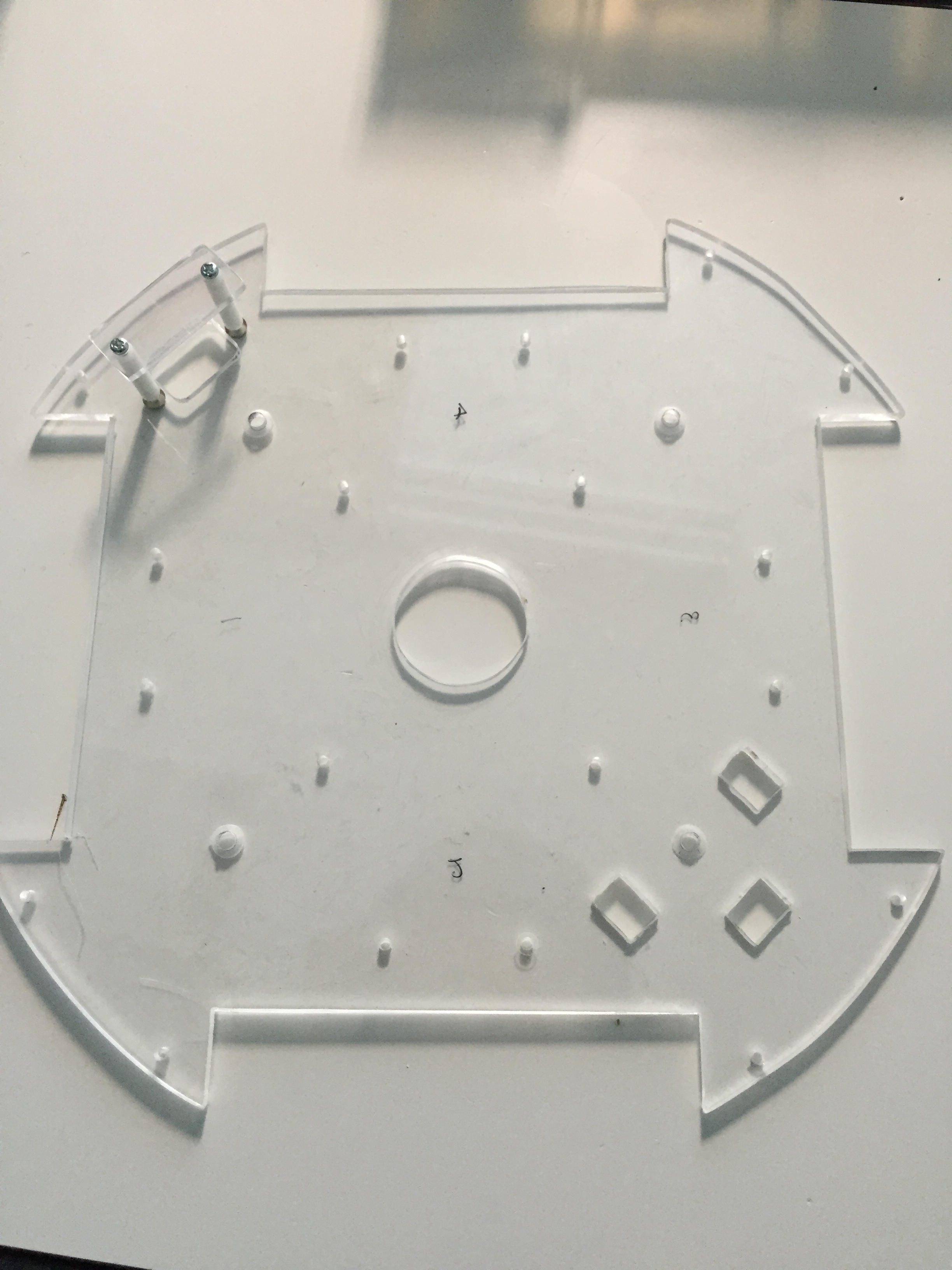
中段シャーシ
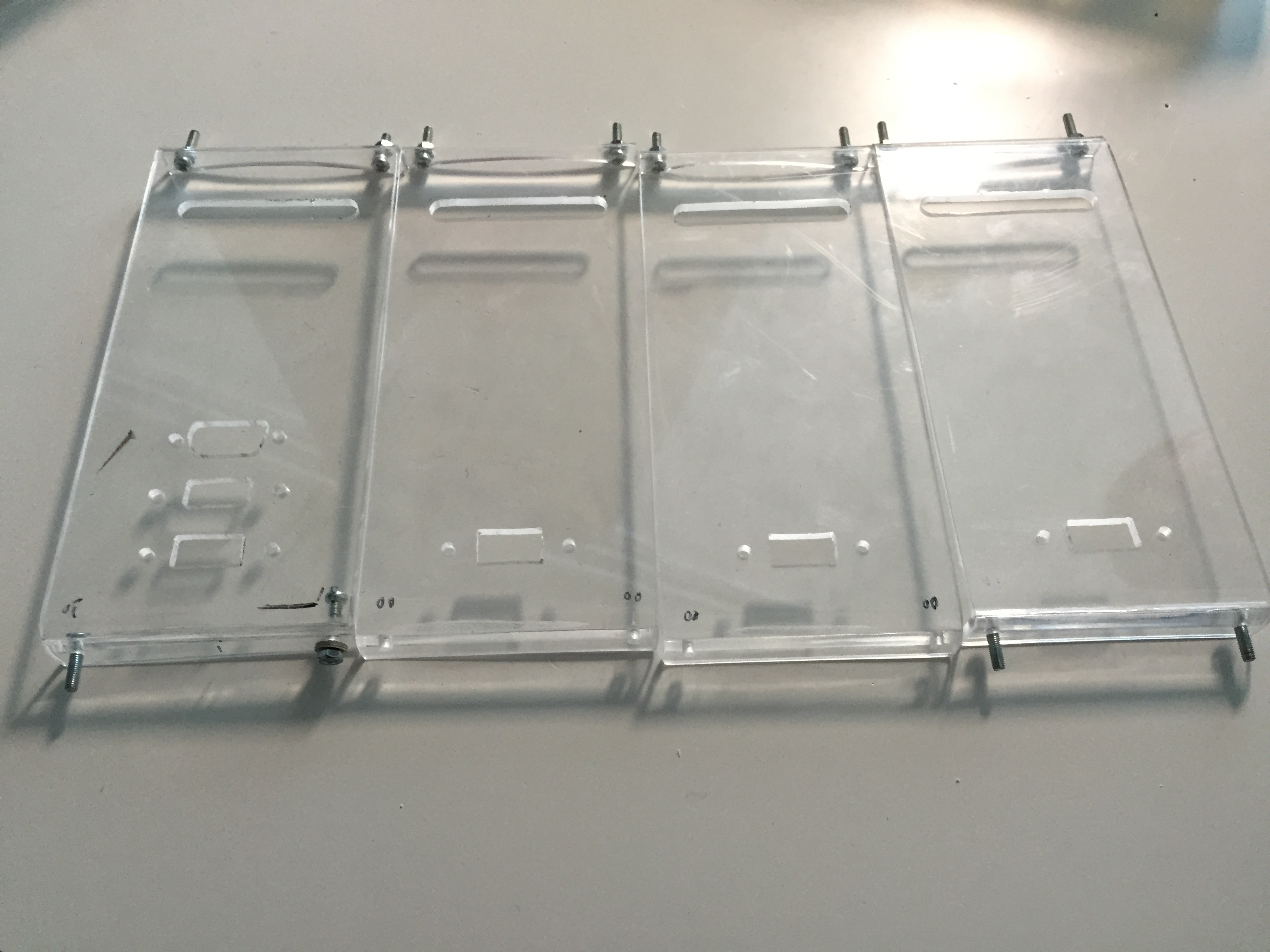
・下段シャーシ
製作時間:3時間(ヤスリがけ含む)
⇒MIRS1402-MECH-0002---シャーシ詳細設計書
4輪のオムニホイールとそれに対応するMCBを搭載するため下段シャーシを新規製作。
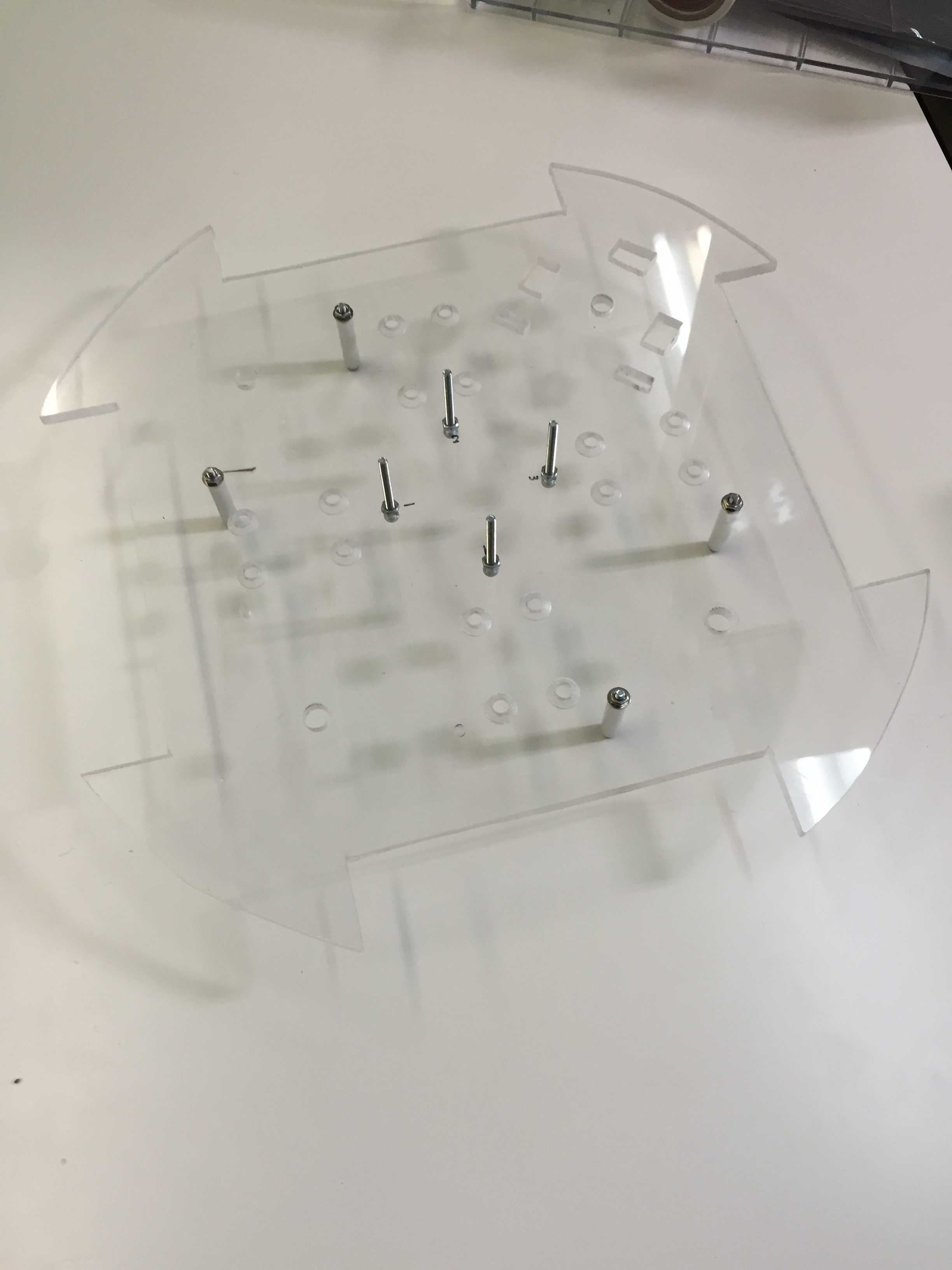
下段シャーシ
・オムニホイール
製作時間:10日(4個)
⇒MIRS1402-MECH-0003---オムニホイール詳細設計書
チームコンセプト"全方位移動"を実現、および費用削減のためにオムニホイールを新規製作(4個)。
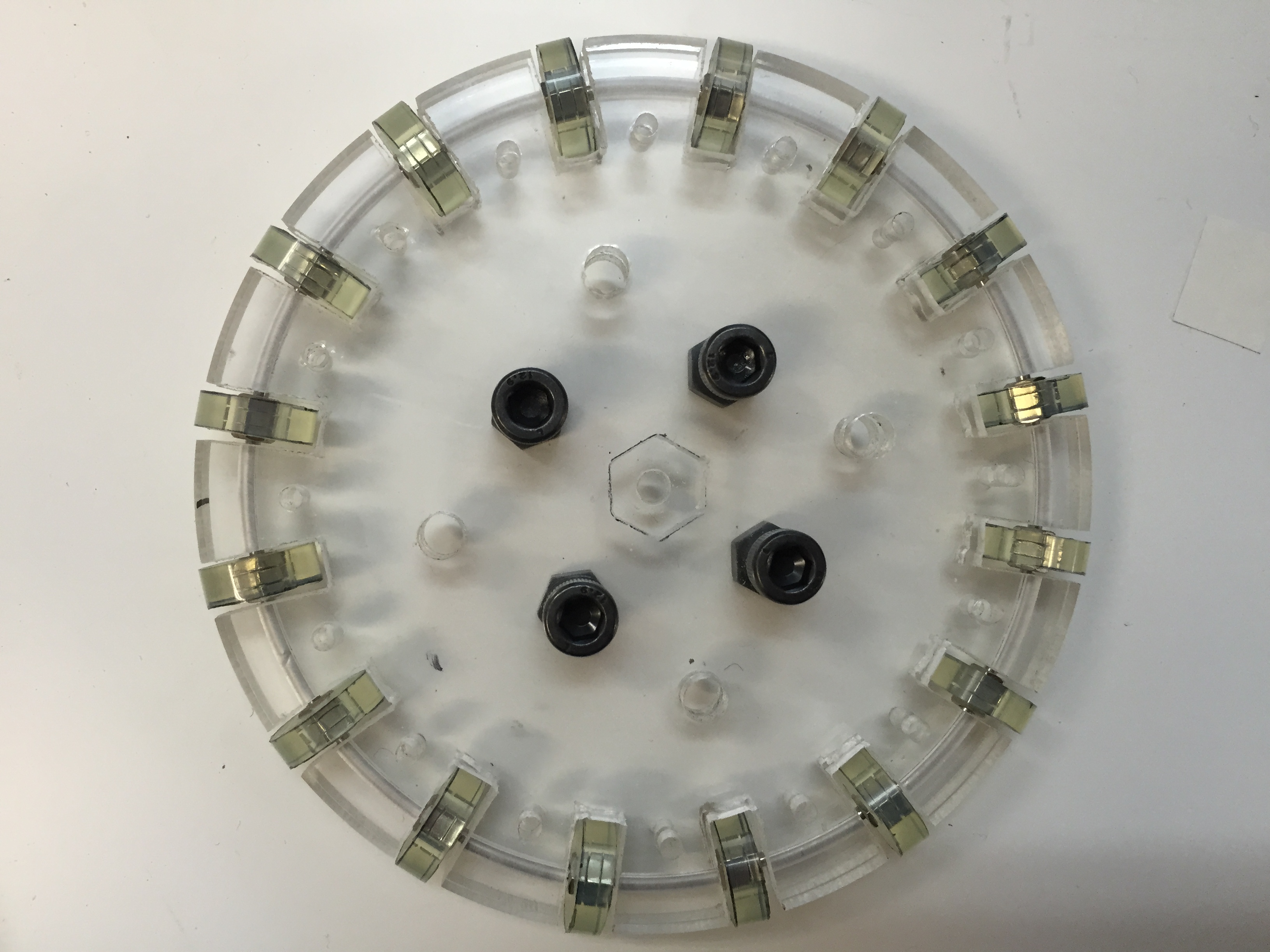
オムニホイール
・超音波センサ固定ボード
製作時間:1日(4個)
⇒MIRS1402-MECH-0004---固定具・支柱詳細設計書
使用する超音波センサを固定できるネジがなかったため、超音波センサ固定ボードを新規製作(4個)。
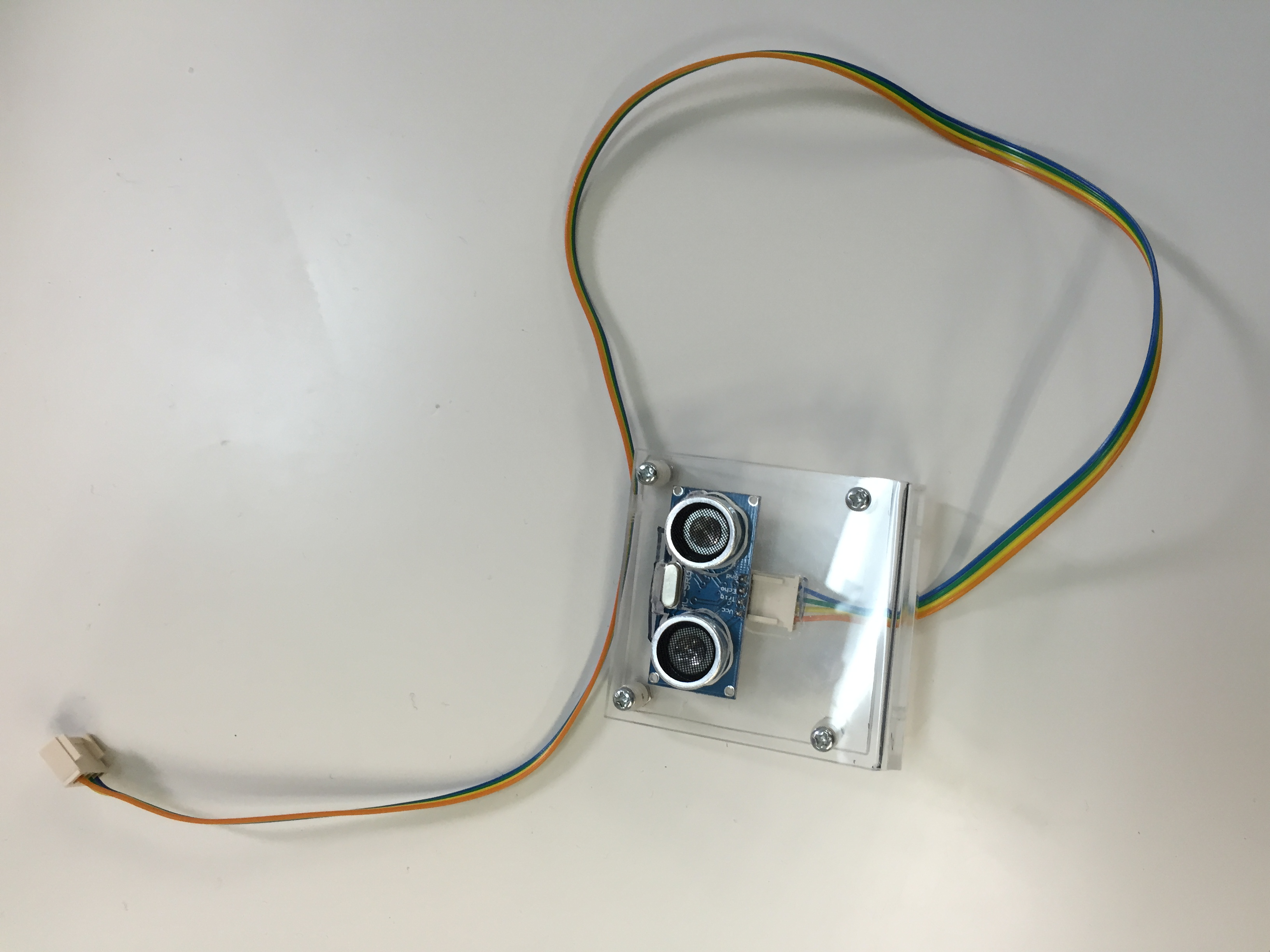
超音波センサ固定ボード
・支柱
製作時間:1日(4個)
⇒MIRS1402-MECH-0004---固定具・支柱詳細設計書
シャーシを3段構造にするため、中段から上段にかけての支柱を新規製作。
支柱
・モータ固定具
製作時間:1日(4個)
⇒MIRS1402-MECH-0004---固定具・支柱詳細設計書
オムニホイールの搭載によって、サスペンション機能が必要となったためモータの固定具を新規製作(4個)。
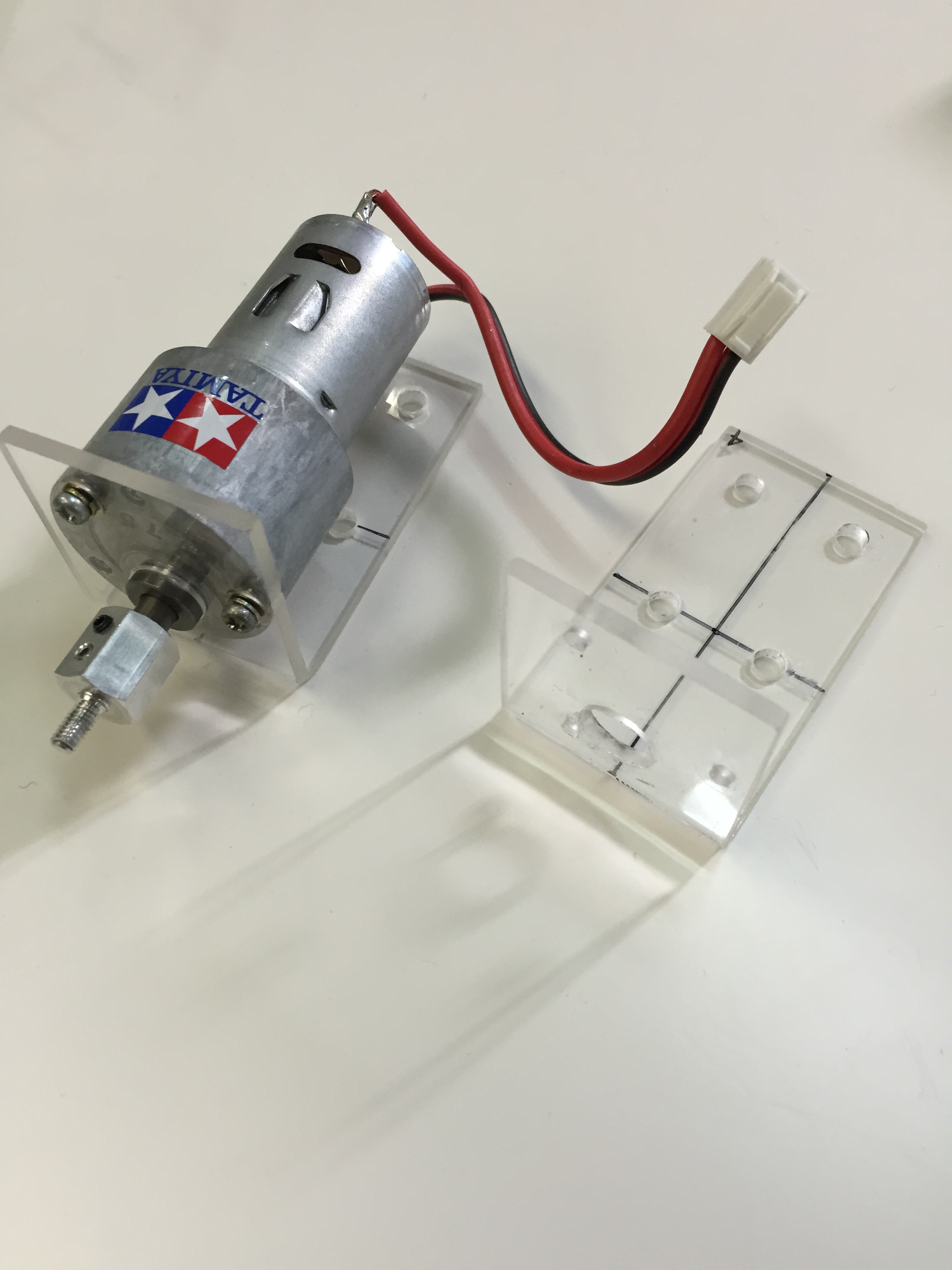
モータ固定具
・パイルバンカー
製作時間:2日
⇒MIRS1402-MECH-0005---パイルバンカー詳細設計書
怪盗機を捕獲する射出機構として、パイルバンカーを新規製作。
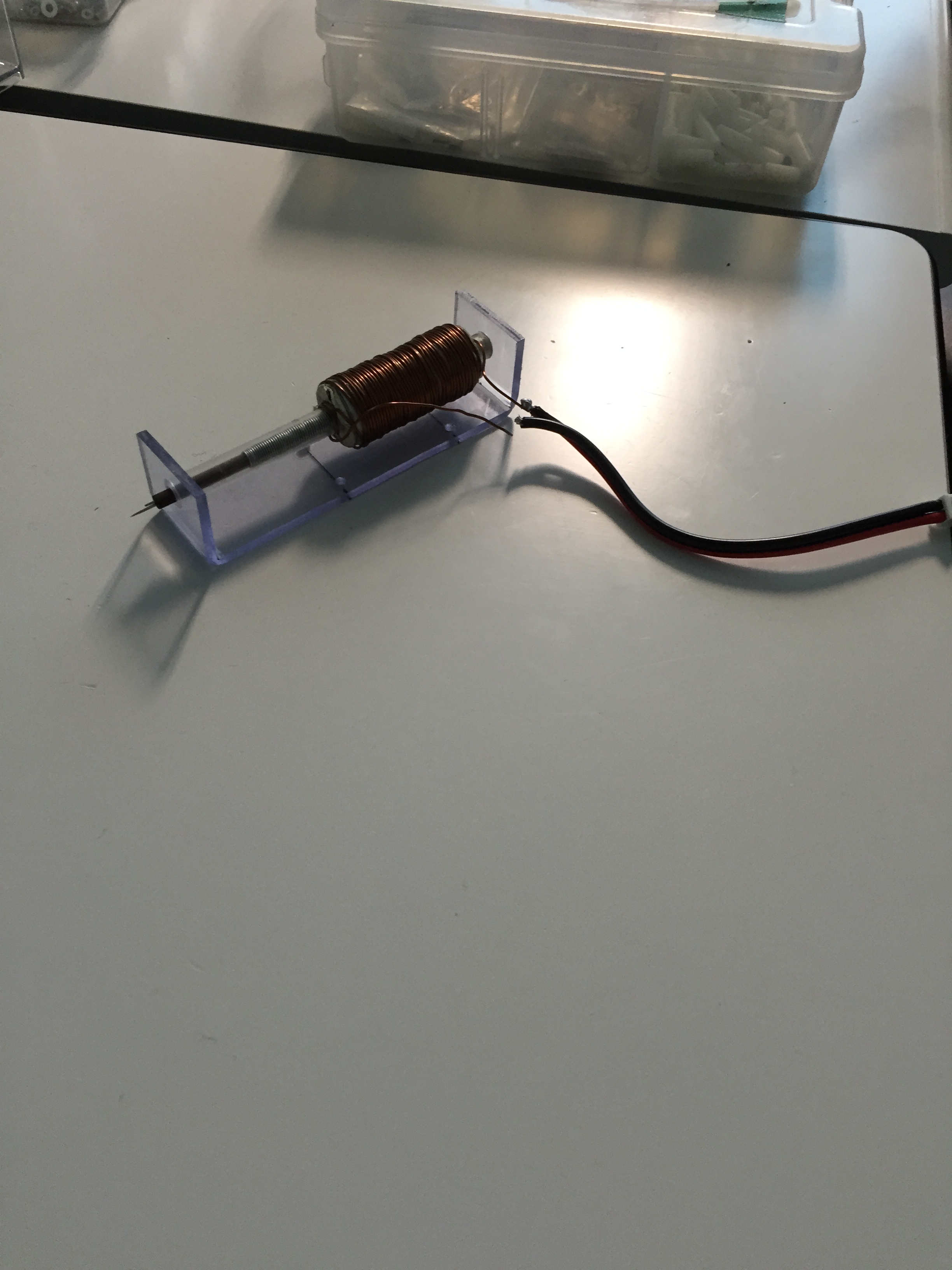
パイルバンカー
・バッテリーボックス
製作時間:2時間
⇒
下段シャーシの下にバッテリーを積むための場所を製作。

バッテリーボックス
・モータドライバ用ヒートシンク
製作時間:2時間(4個)
⇒
発熱対策としてヒートシンクを製作。既製品も存在するが、費用削減と空き時間の活用として製作した。

ヒートシンク
製作したが使用しなかった部品一覧
上記製作物のうち、実際の機体に搭載しなかった部品を以下に理由とともに記載する。
・上段シャーシ(回転部)3Dプリンタで作成したギアの噛み合いが悪かったことに加えステッピングモータの回転力不足で回転機構が完成できなかったため。
・超音波センサ固定ボード
動作確認と搭載はできたが、超音波センサを実装するプログラムの開発ができなかったため
製作物評価・考察(搭載した物のみ)
以下に機体に搭載した製作物の評価および考察を記載する。
・上段シャーシ(回転部以外)中段シャーシ、下段シャーシアクリル板で製作したため加工が容易であった。設計後に必要に応じて随時穴を開け、部品の追加実装や整備性向上ができた。またアルミ板等と違い透明なため内部構造の可視性が高く配線の確認等がしやすかった。
・オムニホイ-ル
全方位移動の要として非常に多くの時間をかけ製作した。その成果もあってか、加工精度もよく完成することができた。
・モータ固定具
アクリル板はアルミ板に比べ曲がりやすいため、4輪走行時に十分にサスペンション機能を果たした。
・パイルバンカー
射出機構としての機能はできていた。しかし射程距離に少々問題があり、本番では怪盗機を捕らえかけたが針が風船に届かないという事態になってしまった。
・バッテリーボックス
はめ込み式のバッテリーボックスを製作したことでバッテリーの着脱が容易になり作業効率が高まった。
・モータドライバ用ヒートシンク
モーター増設等で発生していた発熱の問題がある程度解決した。やや加工精度が悪く、不揃いだったが使用上特に問題はなかったのでここでは触れないものとする。
MIRS1402 メカニクス総括
オムニホイールによる全方位移動が成功した。自作ながら精度も確立できており、その点はよかったといえる。
しかし、詳細設計書と作業が同時進行だったことによる失敗、加工やり直しで作業の進行が遅れ、エレキ、ソフトの進行にも影響が出てしまった。特にMIRS1402の肝となる上段シャーシの設計がしっかりできていなかったため、最終的に回転機構の搭載が不可能となってしまった。
さらに、その影響で統合試験やテスト走行も遅れ、競技会当日は怪盗機を捕らえかけたが針が届かないという事態になってしまった。唯一、警備ロボットの怪盗捕獲を実現しかけただけに残念だった。