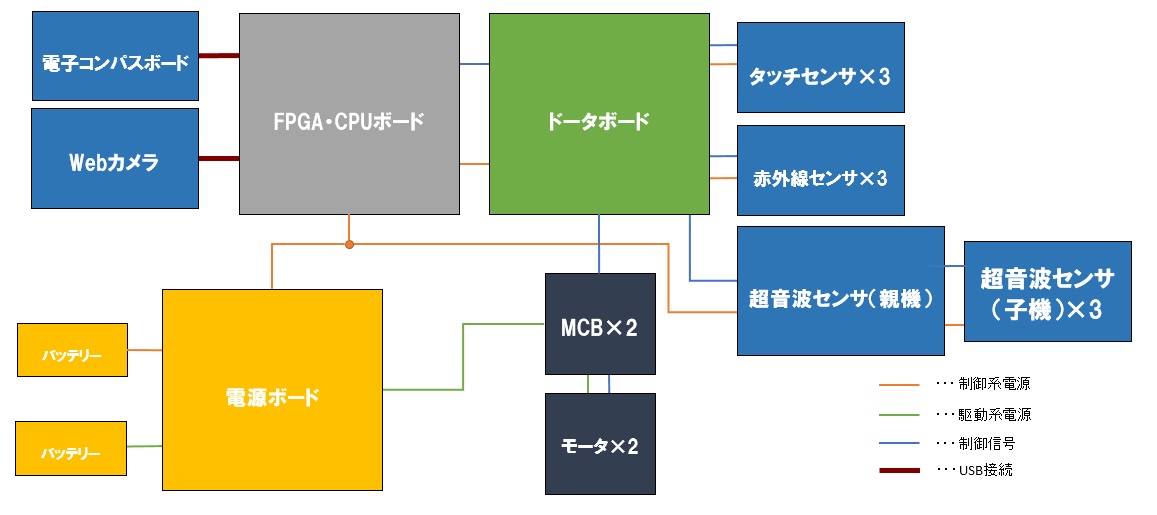
3.システム全体構成図
| 名称 | MIRS1303 システム基本設計書 |
|---|---|
| 番号 | MIRS1303-DSGN-0002 |
最終更新・2013.11.22
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2013.11.19 | 全員 | 初版 | |
| A02 | 2013.11.22 | 高橋、飯塚 | MIRS1303 システム基本設計書レビュー議事録参照 |
| 機能 | 理由 | 実現方法 |
|---|---|---|
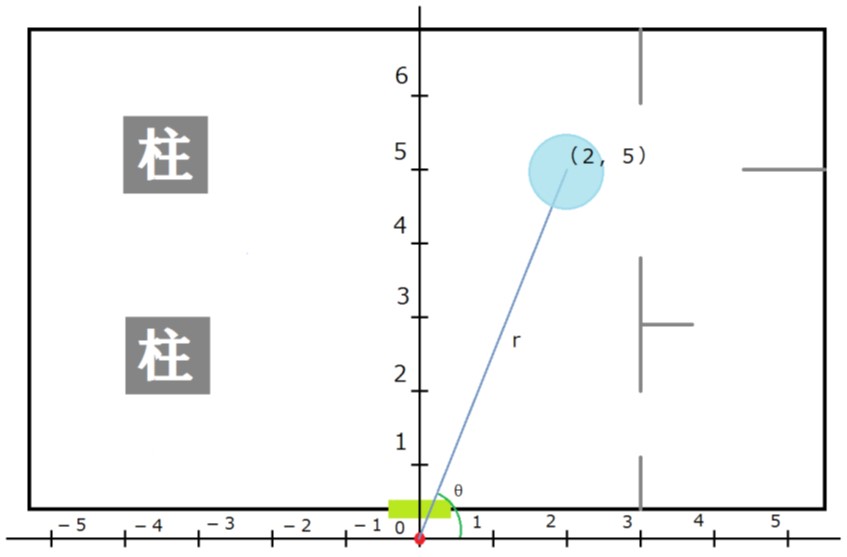
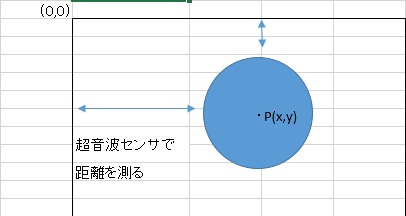
| 自己位置の推定 | 巡回、追跡を行うため | 電子コンパス、ロータリーエンコーダ、超音波センサを用いて実現する |
| 行動の可視化 | 機体の状況や動作を周囲に知らせる。パフォーマンス | 機体の動作や状況に応じて指定したメールアドレスへのメール送信を行う。また余裕があれば、スピーカーなどで機体が状況を報告する機能も導入する。 |
| 小型、軽量化 | スムーズな巡回およびスピーディーな追跡を行うため | シャーシは大幅に小型化し、塩ビ板を用い、円形とする。車輪も薄型のものを去年の班から流用する。 |
| 赤外線の受信 | 怪盗機の追跡 | 赤外線センサを新たに導入し、受信できるようにする。 |
| 部品名 | 備考 |
|---|---|
| シャーシ(下段、中段、上段の3枚) |
塩化ビニールで標準機より小型化した円形のものを製作する。 強度は落ちるが、壊れるほどではないので問題ない。 塩ビ板は、強度を考えて3mmのものを使用する。 |
| バンパー(正面、左、右の3枚) |
塩化ビニール素材(2mm)でシャーシの弧に沿った形状のものを製作 塩ビ板は、強度、曲げること考えて2mmのものを使用する。 |
| スレッド名 | 機能 |
|---|---|
| メインスレッド | 他のスレッドの生成を行う。 |
| モータ制御スレッド | 状況判断スレッドからの指令に従い、モータの制御を行う。 |
| 状況判断スレッド | 各センサや自己位置、画像処理などの情報を元に、次の行動を決める。 |
| 超音波センサスレッド | 超音波センサからの値を受け取り、更新し続ける。 |
| 自己位置推定スレッド | ロータリーエンコーダ、電子コンパスからの値を元に自己位置を推定する。 |

| 物品名 | 販売元 | メーカー | 型番 | 価格 | 個数 | 備考 |
|---|---|---|---|---|---|---|
| USBシリアル変換モジュール | 秋月電商 | 秋月電商 | FT232RL | ¥800 | 1 | |
| 電子コンパス | Strawberry Linux | Strawberry Linux | HMC6352 | ¥1764 | 1 | 分解能0.1度 |
| PIC | 秋月電商 | Microchip Technology Inc | PIC16F1938 | ¥105 | 1 | |
| 赤外線センサ | 秋月電商 | SHARP | GP1UXC41QS | ¥50 | 3 | 最長受信距離:7m | 塩化ビニール板(400×400×3mm) | モノタロウ | タキロン | ESS8800A | ¥1066 | 3 | 塩化ビニール板(200×600×2mm) | モノタロウ | タキロン | ESS8800A | ¥824 | 1 |
| ¥6841 | ||||||