-
本ドキュメントは、各関数をつなげるための統合プログラムの仕様を記したものである。
-
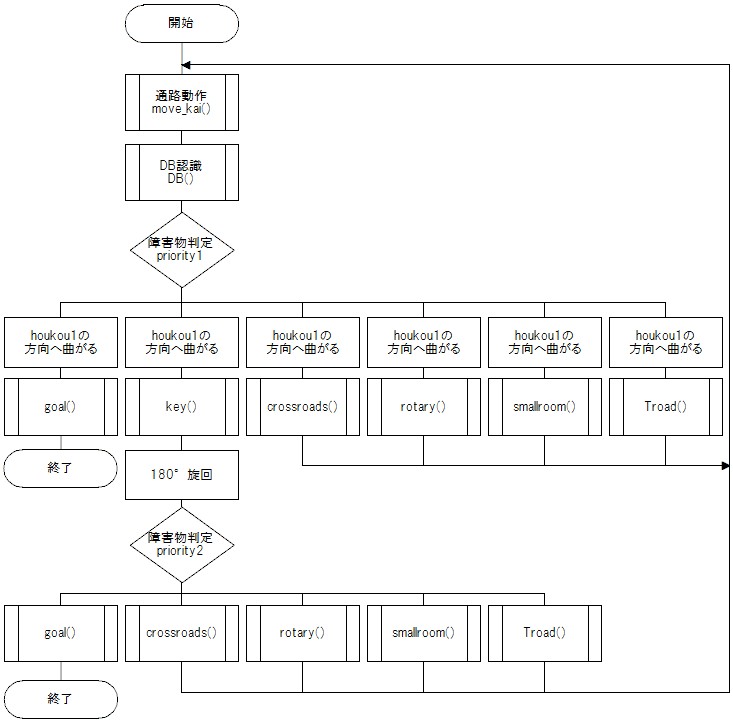
内容はT字路プログラムで、DBの画像処理の結果で各障害物攻略プログラムを呼び出している。
- 各センサ関数を呼び出す。
-
通路動作関数を呼び出す。
- DB関数を呼び出す。
- 戻り値により方向と障害物を判断し、優先順位が高いほうに曲がる。
- ゴールだったら終了し、その他だったら1~5を繰り返す。
-
センサ読み取り関数
標準のinitialize()を使用した。 -
通路動作関数
int move_kai(void)
白線を認識したら正対補正し終了。
詳細は通路動作を参照。 -
DB読み取り関数
void DB(int *priority1,int *priority2,int *houkou1,int *houkou2)
詳細は画像処理関数を参照。 -
小部屋攻略関数
void smallroom(void)
詳細は小部屋プログラムを参照。 -
十字路攻略関数
void crossroads(void)
詳細は十字路プログラムを参照。
沼津工業高等専門学校 電子制御工学科