標準機とはシャーシおよびタイヤ系が一回り小さく、使用しているモータおよびエンコーダが異なっている。モータ・エンコーダ共MAXON製のもので、標準機のモータと比較すると duty-回転速度のリニアリティに優れている。また、エンコーダはモータ軸直結で100PPSのものを使用している。このため、標準機では走行系のパラメータはここに示すソースの値をそのまま用いることは出来ない。
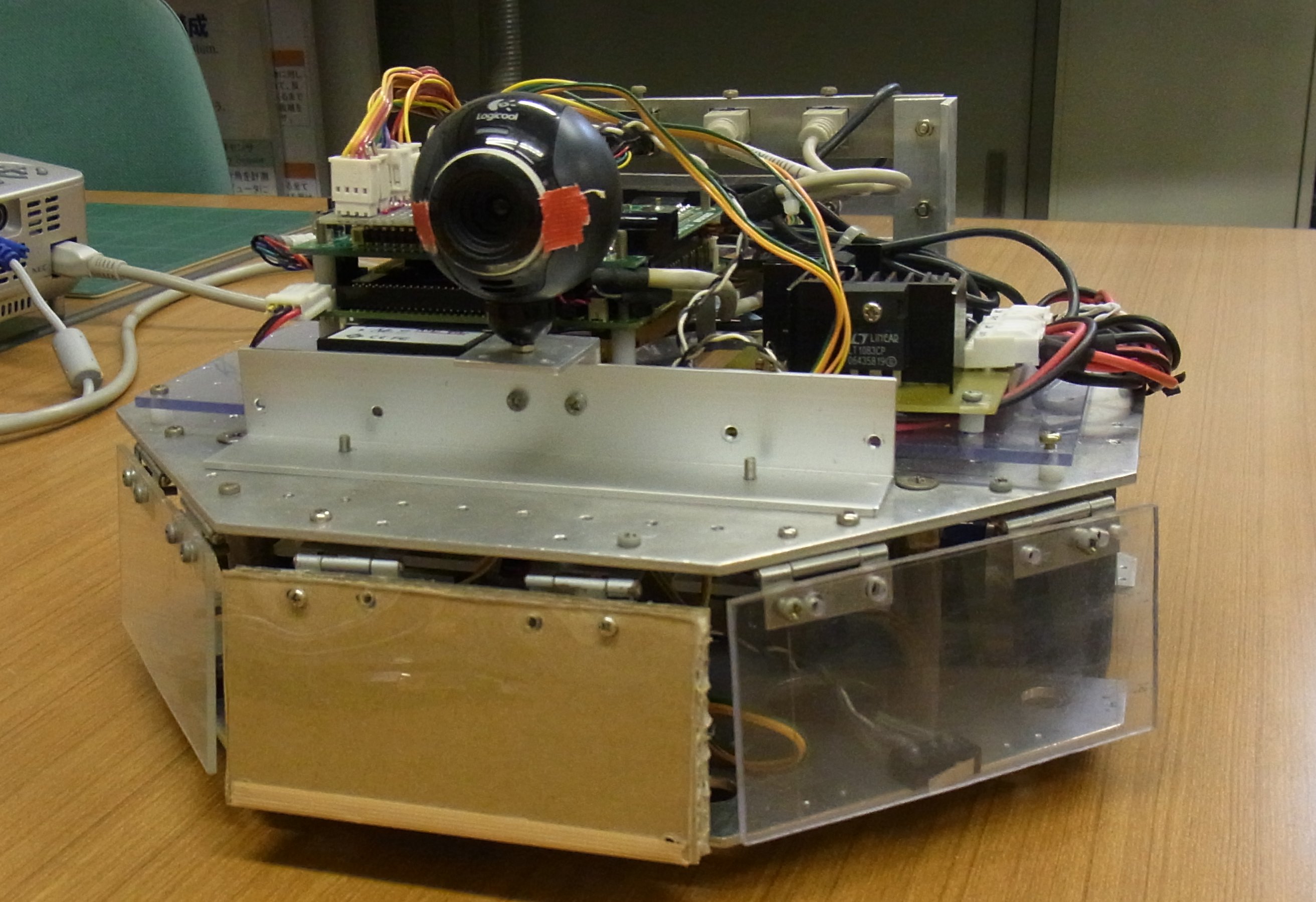
写真1 デモ機(前面の超音波センサを取り外した状態)
| 名称 | MG3S デモ機2014デモ競技会用プログラム |
|---|---|
| 番号 | MIRSMG3D-MG3S-0020 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2014.10.3 | 牛丸 | 初版 | |
| A02 | 2015.7.9 | 牛丸 |
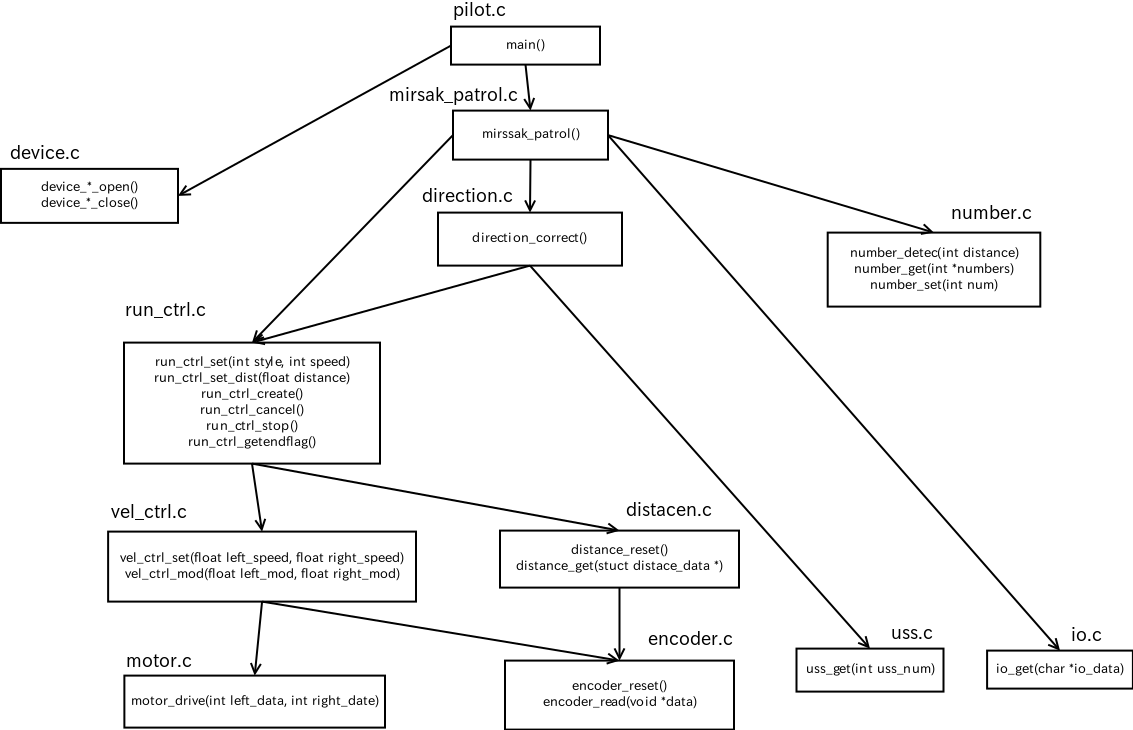
pilot (pilot.c) と mirsak_patrol (mirssak_patrrol.c)モジュール以外は、mg3s_std_v2.* のモジュールを利用する。
ソースファイルのリンク