| 沼津高専 電子制御工学科 | ||||||
| ||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2014/07/14 | 牛丸 | 初版 | |||
| A02 | 2015/04/29 | 牛丸 | 記述ミスの修正、pilotモジュールの説明を追加 | |||
| A03 | 2016/05/16 | 牛丸 | comm モジューを追加、ドキュメント名を変更 | |||
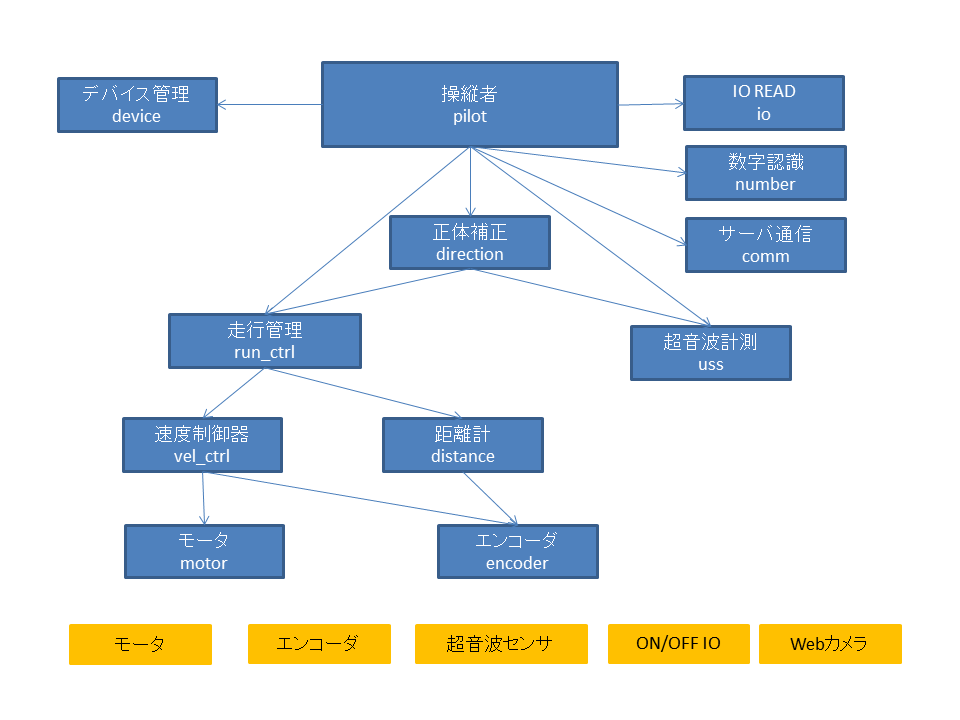
| モジュール名 | module name | 機能 |
|---|---|---|
| モータ | motor | モータを動かす |
| エンコーダ | encoder | エンコーダ値を管理する。 |
| 速度制御器 | vel_ctrl | モータの速度制御を行う。 |
| 距離計 | distance | 動作距離を管理する。 |
| 走行管理 | run_ctrl | 直進・回転走行を行う。 |
| IO READ | io | ON/OFF IO デバイスのデータを読む。 |
| 超音波 | uss | 超音波計測を行う。 |
| 正体補正 | direction | 正体補正する。 |
| 数字認識 | number | 数字認識を行う。 |
| 通信 | comm | サーバとファイルの送受信を行う。 |
| デバイス | device | デバイスファイルをOpen/Closeする。 |
| 操縦者 | pilot | MIRSの動作全体を制御する。 |