2.変更箇所
3.各基板の詳細設計書へのリンク
4.おわりに
-
本ドキュメントは、MIRS1604のエレクトロニクス関連の詳細設計書をまとめたものである。
また、MIRS1604システム基本設計書を基に、エレクトロニクス構成の変更箇所とボードの関係図を記す。
1.はじめに
-
2.変更箇所
-
今後、MIRS1604のエレクトロニクス班が作業する項目について、競技攻略の方針と関連付けるために、変更箇所一覧表とボードの関係図を以下に示す。
2.1 変更箇所一覧表
-
現在のエレクトロニクス構成の変更箇所一覧をTable1に示す。
table 1 変更点 変更点 目的 担当者 タッチセンサを3つ追加する。 オム二ホイールを使用するにあたり全方位に壁を感知するため。 加藤 モータを2つ追加する。 オム二ホイールを使用するにあたりタイヤが2個増えるため。 中津川 webカメラを1個追加する。 怪盗機を発見するため 加藤 4つの超音波センサをL字に配置する。なお、超音波センサは既製品を使う。 正対補正を行うため。 志田 赤外線センサを8個搭載する。 怪盗機から発信される赤外線を感知するため。 志田 モータ制御ボードを2枚追加する。 オムニホイールを使うにあたりモータが2個増えるため、そのモータを制御するため。FPGAのピンを節約するため、入力ピンを4つに減らす。 小出 赤外線センサボードを作成し追加する。 赤外線センサとFPGAを繋げるため。 中津川 ドータボードを改良する。 オムニホイールを使用するにあたり標準のボードが使えなくなったため。 中津川
2.2 ボードの関係図
-
ボードの関係図をFig.1に示す。
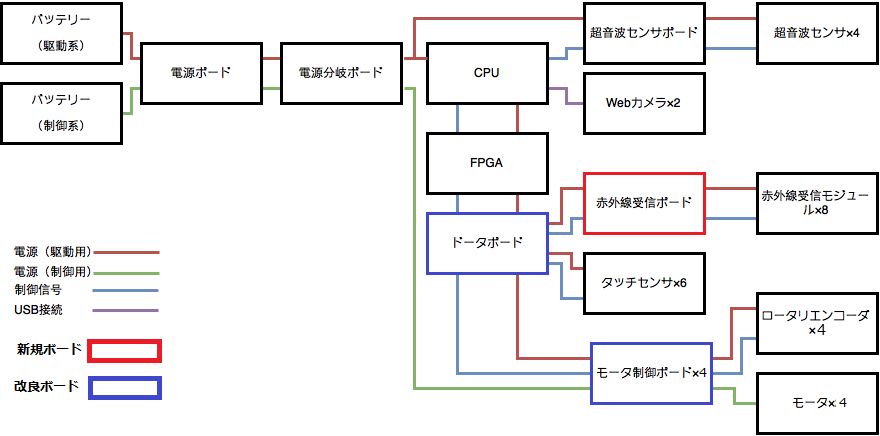
Fig.1 ボード関係図
2.3 モータ制御ボード
-
回路図をFig.2に示す。
この基板の裏側から見たパターン図をFig.3に示す。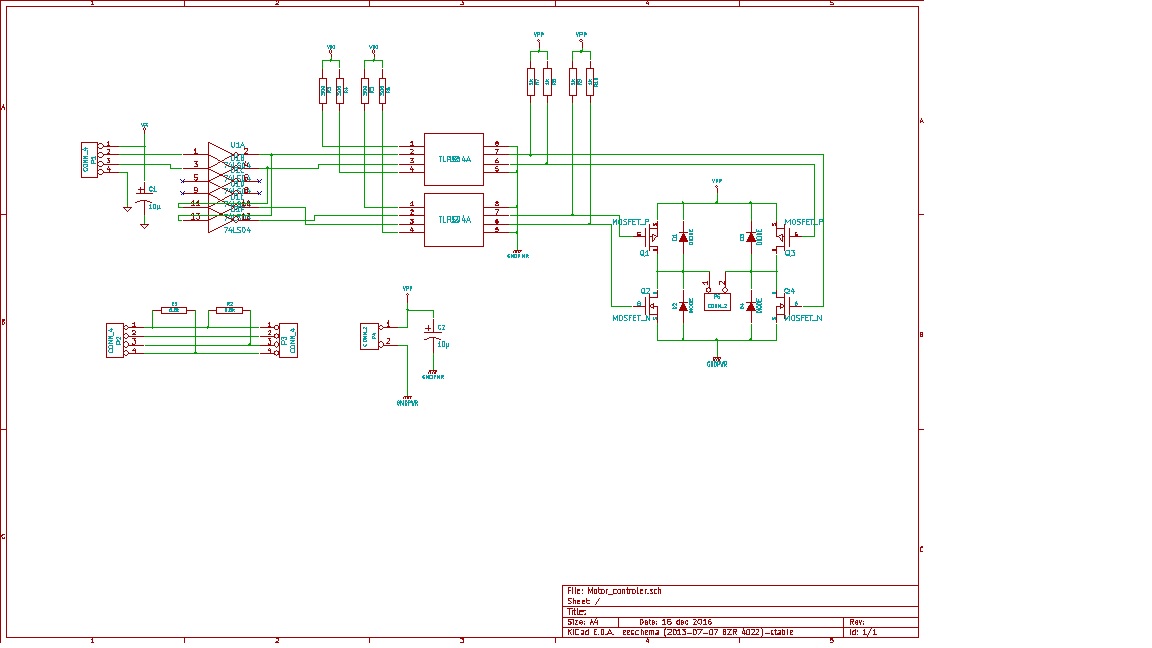
Fig.2 モータ制御ボード回路図 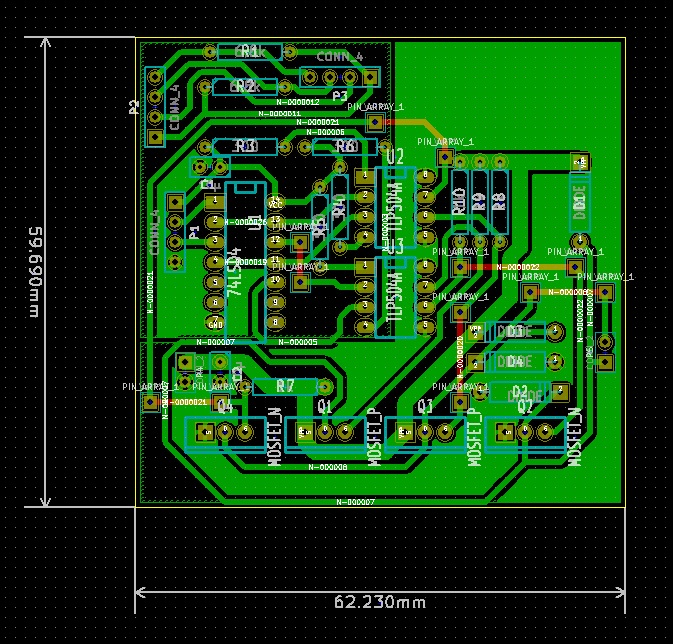
Fig.3 モータ制御ボードパターン図
2.4 FPGAボード
-
Table 1に変更予定のFPGAのピンを示す。
Table 1 FPGAのピン配置 PIN番号 A B 接続ピン 役割 接続ピン 役割 4 H6 encorder_W J6 infrared_0 6 G4 encorder_W G3 infrared_1 8 L8 encorder_Z K8 infrared_2 10 H2 encorder_Z H1 infrared_3 12 VCC VCC 14 L6 encorder_X M6 encorder_Y 16 M8 encorder_X N8 encorder_Y 18 GND GND 20 M4 motor_A M3 motor_C 22 N7 motor_A P7 motor_C 24 N6 motor_B M7 motor_D 26 P4 motor_B P3 motor_D 30 R2 ON/OFF_0 R1 ON/OFF_3 32 R7 ON/OFF_1 T7 ON/OFF_4 36 V2 ON/OFF_2 V1 ON/OFF_5
2.5 ドータボード
-
FPGAに合わせた回路図をFig.4に示す。FPGAボードとA列とB列それぞれに15本のピンをつなぐため、3PINソケット1個と4PINソケット3個に分けた。
この基板の裏側から見たパターン図をFig.5に示す。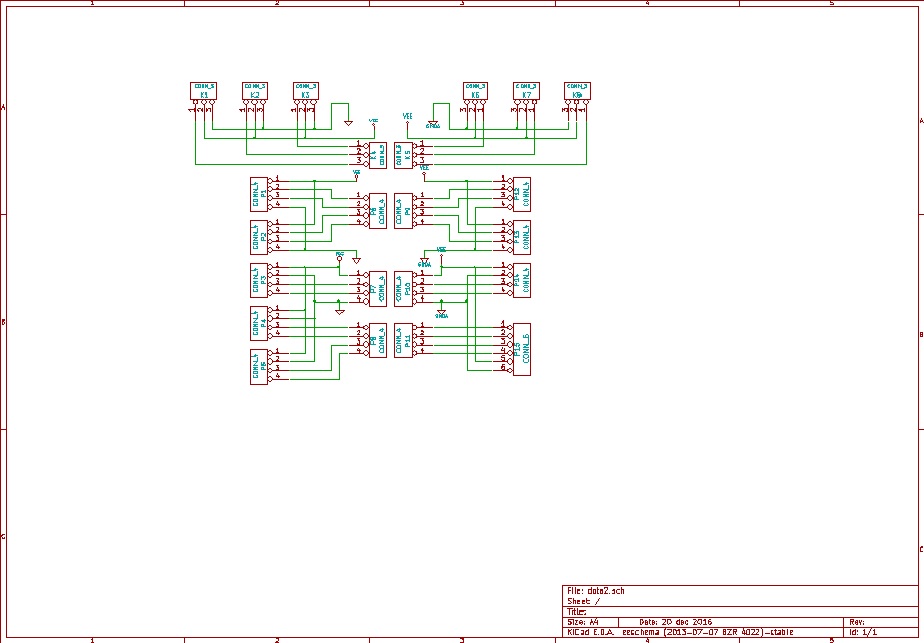
Fig.4 ドータボード回路図 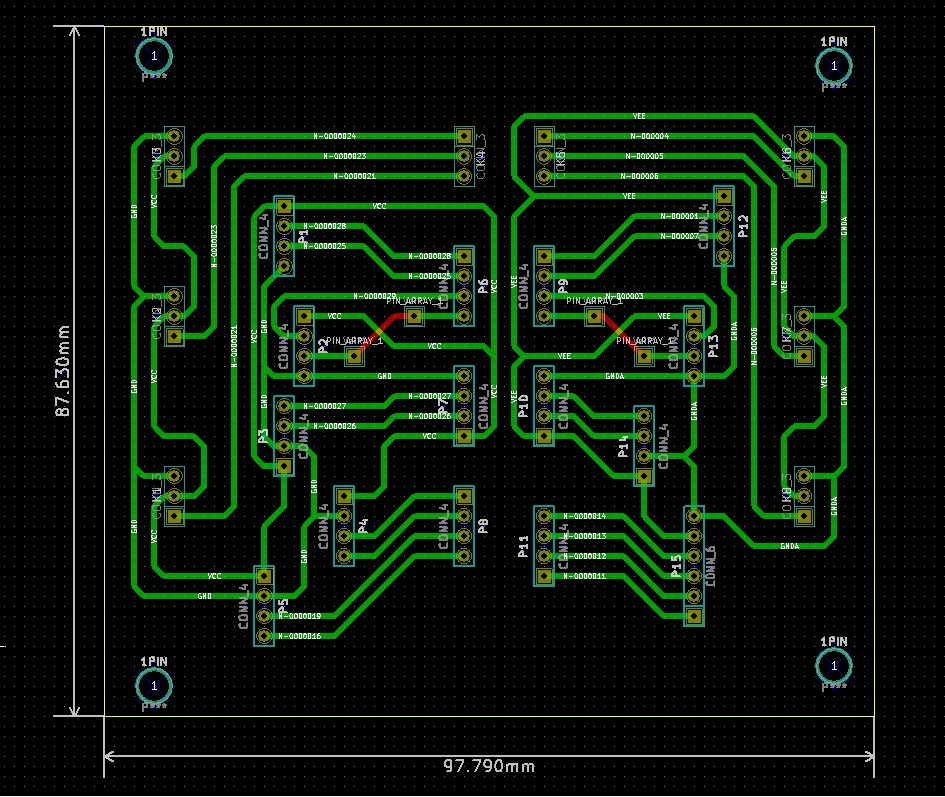
Fig.5 ドータボードパターン図
-
現在のエレクトロニクス構成の変更箇所一覧をTable1に示す。
-
今後、MIRS1604のエレクトロニクス班が作業する項目について、競技攻略の方針と関連付けるために、変更箇所一覧表とボードの関係図を以下に示す。
-
3.各基板の詳細設計書へのリンク
-
Table3 各基板の詳細設計書へのリンク 詳細設計書の名称 概要 担当者 赤外線受信ボード詳細設計書 赤外線受信ボードを製作し、赤外線受信モジュールを設置する。
-
-
4.おわりに
- 各ボードの詳しい項目については、リンク先の各詳細設計書を参照。以上でエレクトロニクス詳細設計書の終わりとする。