|
|---|
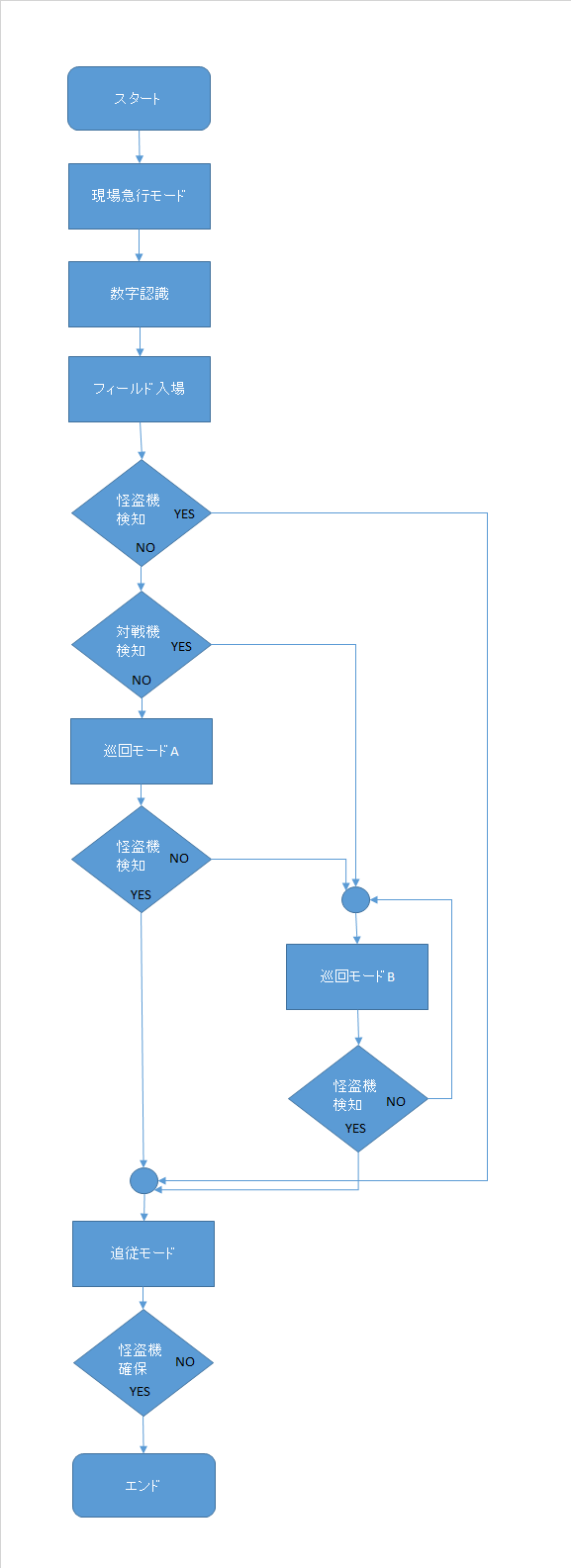
| Fig. 1 動作シナリオ |
| 名称 | MIRS1604 システム基本設計書 |
|---|---|
| 番号 | MIRS1604-DSGN-0002 |
| 版数 | 最終更新日 | 作成 | HTML作成 | 承認 | 改訂記事 |
|---|---|---|---|---|---|
| A01 | 2016.11.22 | 小出瑛介 志田来暉 中津川智也 青野新大 田口晶裕 杉山瀬名 堀住恭平 加藤侑津希 梶田直哉 | 小出瑛介 志田来暉 中津川智也 青野新大 田口晶裕 杉山瀬名 堀住恭平 加藤侑津希 梶田直哉 | 初版 | |
| A02 | 2016.11.25 | 小出瑛介 志田来暉 中津川智也 青野新大 田口晶裕 杉山瀬名 堀住恭平 加藤侑津希 梶田直哉 | 小出瑛介 志田来暉 中津川智也 青野新大 田口晶裕 杉山瀬名 堀住恭平 加藤侑津希 梶田直哉 | 青木悠祐 鈴木静男 | 指摘箇所の訂正 |
|
|
|---|
| Fig. 1 動作シナリオ |
| 機能 | 内容 | 実現方法 |
|---|---|---|
| 走行 | オムニホイールにより、回転せずに全方位に移動できる。 | タイヤをオムニホイールに変更し、モーターとモーター制御ボードを追加する。 |
| 数字認識 | 数字ボードの数字を3s以内に認識する。 | 正体補正を調節し、正体補正を素早くする。 |
| Webカメラによる怪盗機捜索 | Webカメラによる色認識で怪盗機を認識する。 | 機体にL字に設置したカメラを用いて行う。設置場所は機体概形を参照。 |
| 赤外線センサによる怪盗機捜索 | 赤外線センサによる検知で怪盗機を認識する。 | 機体に八個設置した赤外線センサを用いて行う。設置場所は機体概形を参照 |
| 正体補正 | 2機の超音波センサのずれをなくなるようにして生体補正を行う。 | 機体にL字に設置した超音波センサを用いて行う。設置場所は機体概形を参照。 |
| 機体の直進走行・回転 | 指定した距離を直進する。また、指定した角度を回転する。 | ロータリーエンコーダを用いる。 |
| サーバとの通信 | 数字認識において、画像から得られた数字データをサーバへ送信する。 | 数字のデータをsshで送る。 |
| 変更点 | 目的 | 担当者 |
|---|---|---|
| 標準タイヤからオムニホイールにする。 | 全方向移動を可能にするため。 | 田口 |
| バンパーを6枚新規作成する。 | タッチセンサを全方位に搭載するため。 | 青野 |
| 上下シャーシを新しくする。 | オムニホイールにするにあたり、標準のシャーシが使えなくなるため。 | 田口 |
| 支柱をより長くする。 | タイヤを中に入れるための、高さを確保するため。 | 青野 |
| モータマウントを2個作成する。 | オムニホイールへの変更により、モータが2個増えるため。 | 田口 |
| ギアを4個作成する。 | ロータリエンコーダの輪ゴムの代わりに使用 | 青野 |
| 変更点 | 目的 | 担当者 |
|---|---|---|
| タッチセンサを3つ追加する。 | オム二ホイールを使用するにあたり全方位に壁を感知するため。 | 加藤 |
| モータを2つ追加する。 | オム二ホイールを使用するにあたりタイヤが2個増えるため。 | 中津川 |
| webカメラを1個追加する。 | 怪盗機を発見するため | 加藤 |
| 4つの超音波センサをL字に配置する。なお、超音波センサは既製品を使う。 | 正対補正を行うため。 | 志田 |
| 赤外線センサを8個搭載する。 | 怪盗機から発信される赤外線を感知するため。 | 志田 |
| モータ制御ボードを2枚追加する。 | オムニホイールを使うにあたりモータが2個増えるため、そのモータを制御するため。 | 小出 |
| 赤外線センサボードを作成し追加する。 | 赤外線センサとFPGAを繋げるため。 | 中津川 |
| ドータボードを改良する。 | オムニホイールを使用するにあたり標準のボードが使えなくなったため。 | 中津川 |
| 変更点 | 目的 | 担当者 |
|---|---|---|
| オムニホイール用の直進走行と回転のプログラムに変更する。 | タイヤをオムニホイールに変更したため、平行移動などの動作ができるようにする。 | 梶田 |
| 赤外線センサモジュールの追加する。 | 赤外線センサを追加するため。 | 梶田 |
| Webカメラによる色認識プログラムを作成する。 | 色認識により、怪盗機を発見するため。 | 堀住 |
| 超音波センサ追加による超音波計測プログラムを変更する。 | 超音波の数が追加されたため、標準機のものではそのまま使用できないため。 | 杉山 |
| 現場急行プログラムの改良をする。 | プレ競技会の現場急行プログラムでは精度が低いため、必ず急行できるように改良する。 | 杉山 |
| 巡回モード時のプログラムを作成する。 | 戦略通りの巡回ができるようにする。 | 堀住 |
| 怪盗機を追跡するモード時のプログラム作成。 | 怪盗機を追跡し、確保できるようにする。 | 堀住 |
| 機体改造による各パラメータ調節 | タイヤ半径や機体半径などの要素が変更されるため変更されるため。 | 梶田 |
| 部品名 | 開発要素 | 個数 |
|---|---|---|
| オムニホイール | 新規に作成 | 4 |
| バンパー | 新規に作成 | 6 |
| 上下シャーシ | 新規に作成 | 各1 |
| 支柱 | 新規に作成 | 4 |
| エンコーダマウント | 標準機の物を使用。 | 2 |
| モータマウント | 2個追加 | 4 |
| ギア | 新規に作成 | 4 |
|
|
|
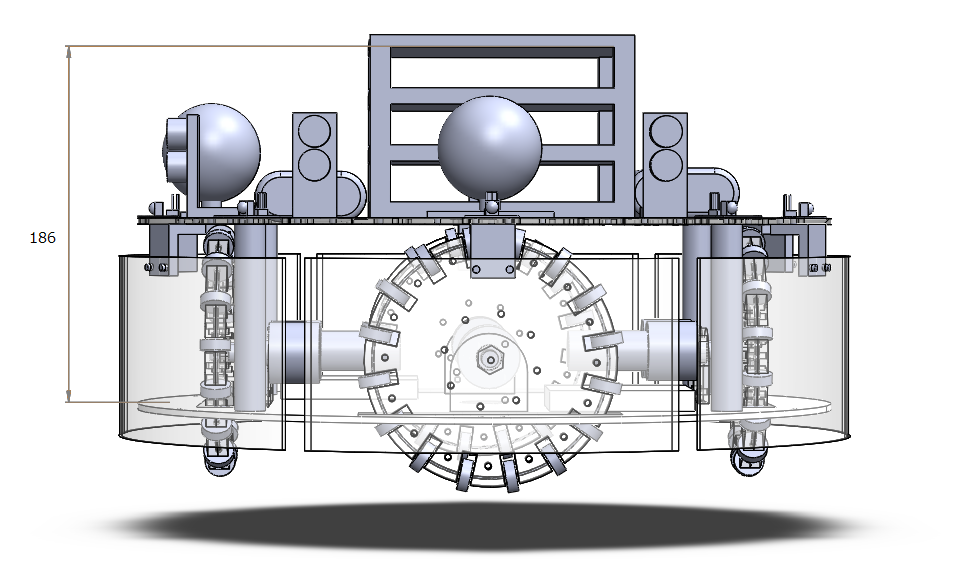
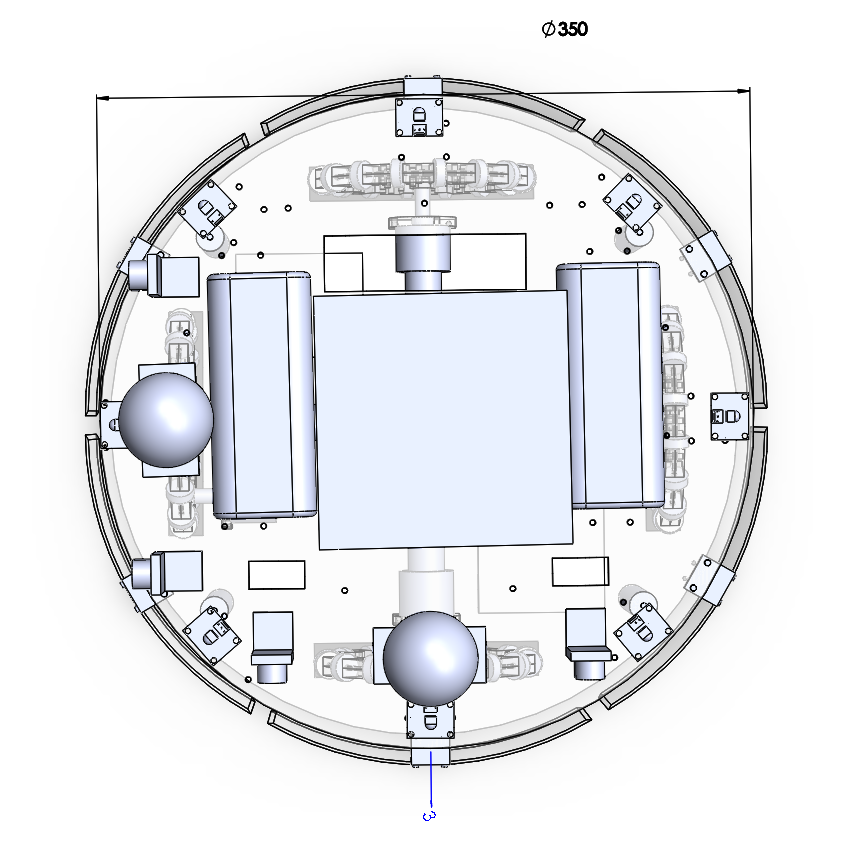
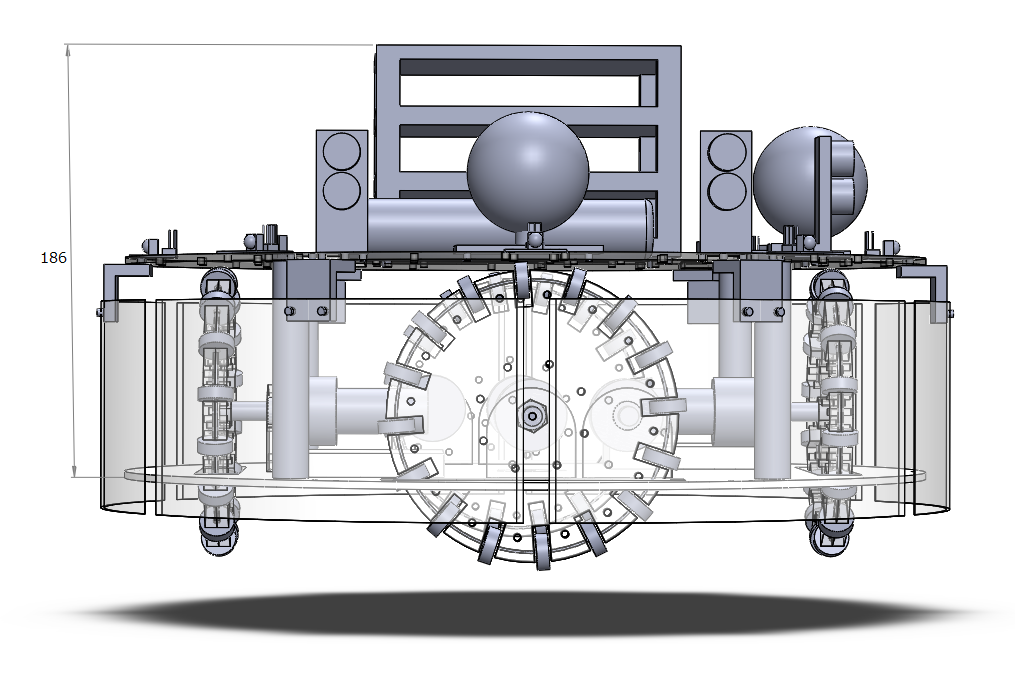
| Fig.2(a) 正面図 | Fig.2(b) 上面図 | Fig.2(c) 右面図 |
|
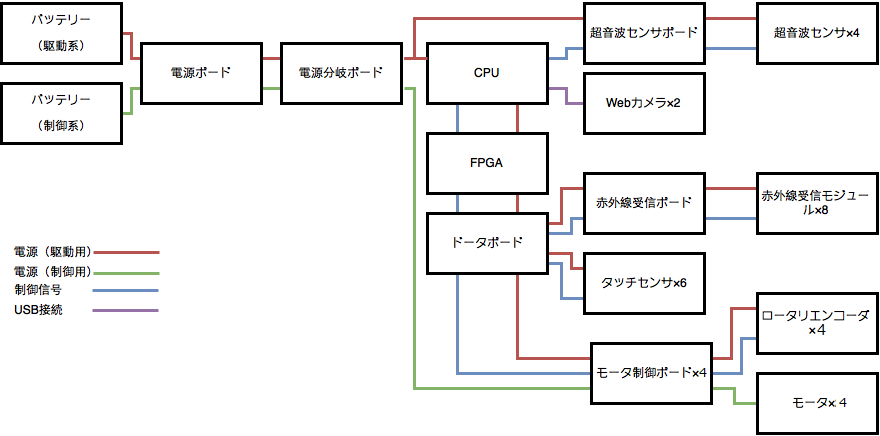
| Fig.3 エレクトロニクス構成図 |
| ボード名 | 概要 | 個数 |
|---|---|---|
| ドータボード | 既存のボードが使用できなくなったため、新たに製作。FPGAから各ボードに配線するため。 | 1 |
| モータ制御ボード | ボードが足りなくなったため、新たに製作。モータを制御すために使用。 | 4 |
| 赤外線受信ボード | 赤外線の信号を整理するためのボードがないため、新たに製作。 | 1 |
| 超音波センサボード | 1504のものを使用。各超音波センサの信号を整理を整理するため。 | 1 |
| CPUボード | 標準機のものを使用。 | 1 |
| FPGAボード | 標準機のものを使用。 | 1 |
| 電源分岐ボード | 標準機のものを使用。 | 1 |
| 電源ボード | 標準機のものを使用。 | 1 |
|
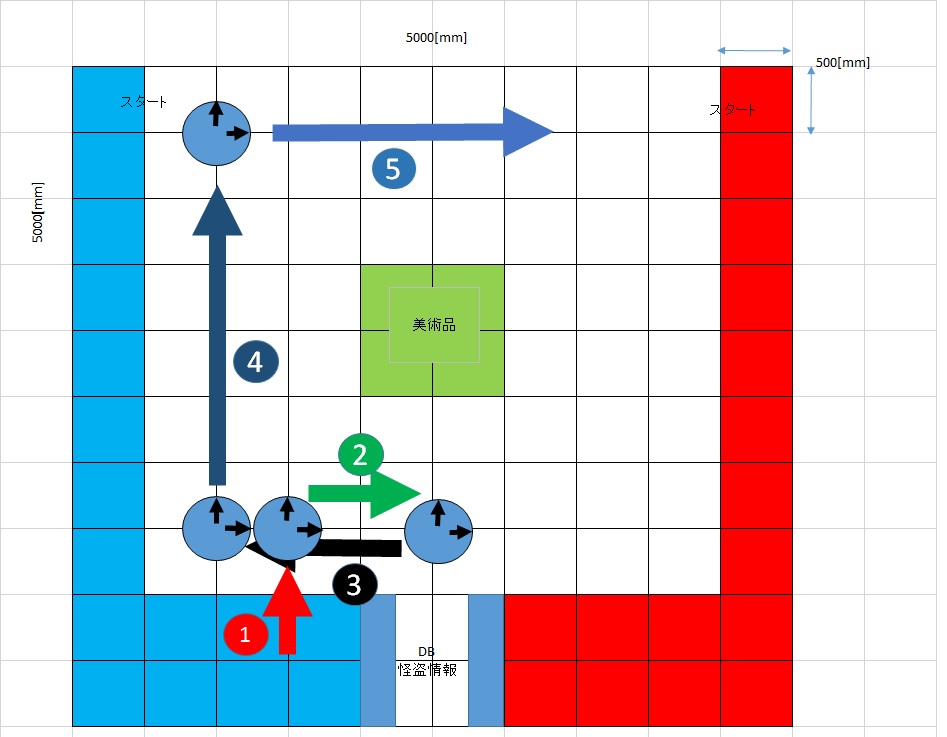
| Fig.4 巡回経路1 |
|
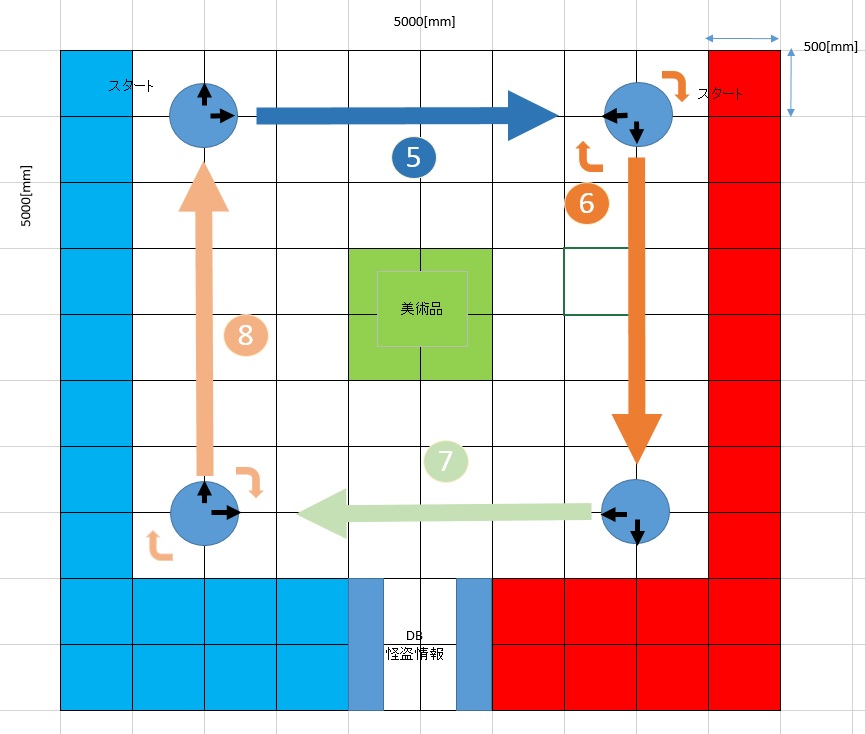
| Fig.5 巡回経路2 |
| モジュール名 | 機能 | 開発要素 |
|---|---|---|
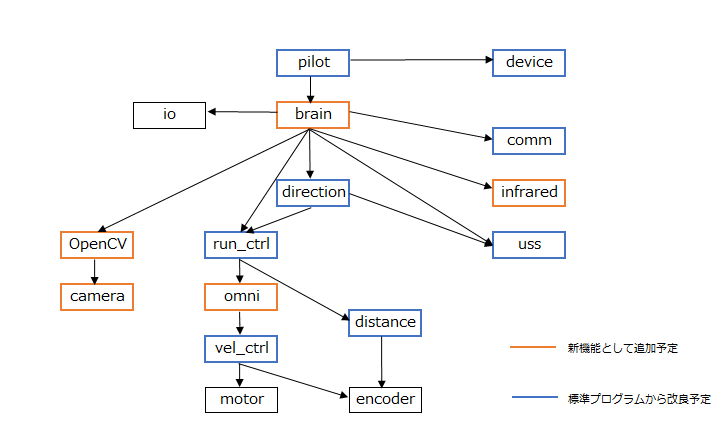
| pilot | MIRSの動作全体を制御する。 | 既存のものを使用する。 |
| brain | 動作シーケンスを管理する。 | 新規に作成する。 |
| OpenCV | 画像処理を行う。 | 新規に作成する。 |
| device | デバイスファイルをOpen/Closeする。 | 赤外線センサとwebカメラを追加する。 |
| direction | 正体補正をする。 | オムニホイールに変更するため、対応させる。 |
| camera | 画像を取得する。 | 新規に作成する。 |
| Infrared | 赤外線センサの信号を処理する。 | 新規に作成する。 |
| uss | 超音波計測を行う。 | 超音波センサの数が4個になったため、対応させる。 |
| io | ON/OFF IOデバイスのデータを処理する処理する。 | 既存のものを使用する。 |
| comm | サーバとの通信を行う。 | 既存のものを使用する。 |
| run_ctrl | 走行、回転の制御を行う。 | オムニホイールに変更するため対応させる。 |
| distance | 走行距離を管理する。 | オムニホイールに変更するため対応させる。 |
| vel_ctrl | モーターの速度制御を行う。 | オムニホイールに変更するため対応させる。 |
| encoder | エンコーダ値を管理する。 | 既存のものを使用する。 |
| omni_ctrl | オムニホイールの制御を行う。 | 新規に作成する。 |
| motor | モーターの管理を行う。 | モーターの数を4個に変更するため対応させる。 |
|
| Fig.6 モジュール構成図 |
購入予定物品をtable 8に示す。
| 物品名 | 個数 | 要求 | 製品詳細 | 購入先 | 単価 | 小計 |
|---|---|---|---|---|---|---|
| モータ | 2 | 増設するオムニホイール用 | 型番380K75 モノタロウ ギヤードモーター | モノタロウ | 4,739円 | 9,478円 |
| アクリル板 | 2 | 新しいシャーシ、バッテリーボード、オムニホイール、モータマウント用 | アクリル板3mm(495×1000)、アクリル板5mm(330×1000) アクリル板 | アクリルアイ | 1,680円、1,950円 | 3,630円 |
| ウレタンパイプ | 4 | オムニホイールのローラー用 | ウレタンパイプ | モノタロウ | 226円 | 904円 |
| 針金 | 1 | オムニホイールのローラー固定用 | 針金 Φ2mm | モノタロウ | 259円 | 259円 |
| ギア | 4 | ロータリエンコーダの輪ゴムの代わりに使用 | 3Dプリンタを使用。1gあたり3円。ギア1つあたり約6g。 | 18円 | 72円 | |
| フォトカプラ | 3 | モータ制御ボード用 | 2回路入フォトカプラ 赤外LED+フォトトランジスタ TLP621-2 | 秋月電子通商 | 70円 | 210円 |
| pチャネルMOS-FET | 6 | モータ制御ボード用 | PchパワーMOSFET 2SJ349(60V20A) | 秋月電子通商 | 200円 | 1200円 |
| nチャネルMOS-FET | 6 | モータ制御ボード用 | NchパワーMOSFET IRFB3607PBF (75V80A) | 秋月電子通商 | 140円 | 840円 |
| コンデンサ(100μF) | 2 | モータ制御ボード用 | 電解コンデンサー100μF25V85℃(ルビコンPK) | 秋月電子通商 | 10円 | 20円 |
| コンデンサ(10μF) | 2 | モータ制御ボード用 | 電解コンデンサー10μF50V85℃(ルビコンPK) | 秋月電子通商 | 10円 | 20円 |
| 定電圧ダイオード(20個入り) | 1 | モータ制御ボード用 | 汎用整流用ダイオード 1000V1A 1N4007-B(20本入) | 秋月電子通商 | 100円 | 100円 |
| PIC16F628A | 3 | 赤外線ボード用 | PICマイコン PIC16F628A-I/P | 秋月電子通商 | 180円 | 540円 |
| 合計 | 17,273円 |
|
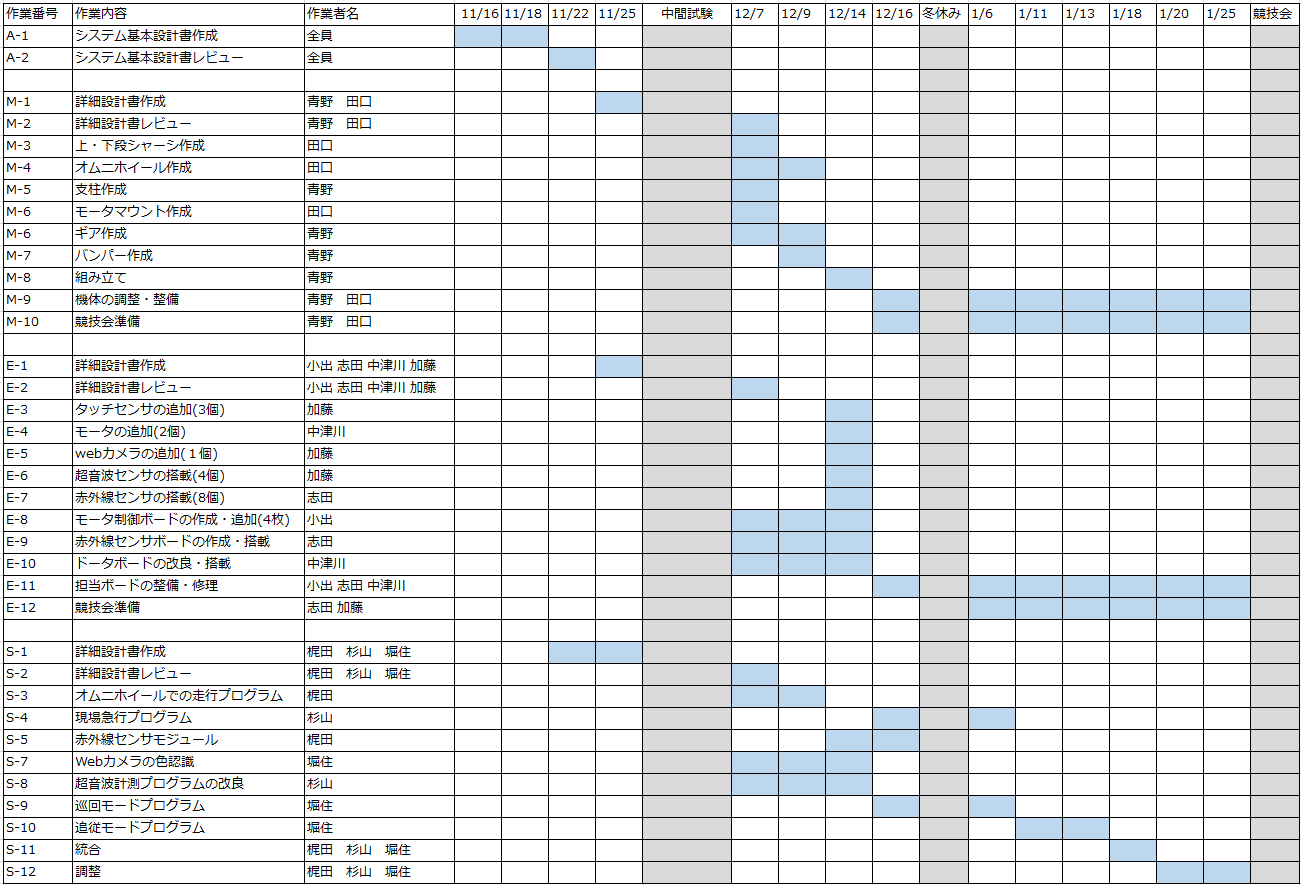
| Fig.7 開発スケジュール |