はじめに
本ドキュメントはMIRS1603の標準部品試験の結果報告書である。
試験項目
table 1に試験項目を示す。
| 種類 | 試験対象 | 試験項目 | 試験担当者 | 試験完了日 | 備考 |
|---|---|---|---|---|---|
| ボード | ドータボード |
導通チェック 動作チェック |
石田 田中 | 去年のものを使用 | |
| モータ制御ボード | 遠藤 永田 | 新しく作成 | |||
| 超音波センサボード | 田中 橋本 | 去年のものを使用 | |||
| 電源ボード | 大濱 片山 | 去年のものを使用 | |||
| メカ部品 | シャーシ上段 | 秋山 内山 | 新しく作成 | ||
| シャーシ下段 | 野本 秋山 | 去年のものを使用 | |||
| バッテリーボード | 内山 野本 | 去年のものを使用 | |||
| 支柱(大) | 秋山 内山 | 去年のものを使用 | |||
| 支柱(小) | 野本 秋山 | 去年のものを使用 | |||
| 超音波センサ取付板 | 内山 野本 | 去年のものを使用 | |||
| 電源ボード固定金具 | 秋山 内山 | 去年のものを使用 | |||
| USB固定金具 | 野本 秋山 | 新しく作成 | |||
| バンパ | 内山 野本 | 去年のものを使用 | |||
| モータエンコーダマウント | 秋山 内山 | 去年のものを使用 | ロータリエンコーダマウント | 野本 秋山 | 去年のものを使用 |
| ケーブル | モータ制御ボード電源ケーブル | 田中 永田 | 去年のものを使用 | ||
| CPU電源ケーブル | 大濱 片山 | 去年のものを使用 | |||
| 11pinフラットケーブル | 大濱 片山 | 新しく作成 | |||
| 6pinケーブル | 田中 永田 | 去年のものを使用 | |||
| 4pinケーブル | 大濱 片山 | 去年のものを使用 |
試験結果
-
ボード
-
モーター制御ボード(MCB)
(1)実装チェック
部品が実装図と同様に配置されていたので合格とした。
(2)導通チェック
導通すべき箇所と短絡しているべき箇所についてテスターで確認できたので、合格とした。
(3)動作試験
fig3.1.3.1~fig3.1.3.8に確認された信号の波形を示す。
・モーターの正転、逆転信号の確認
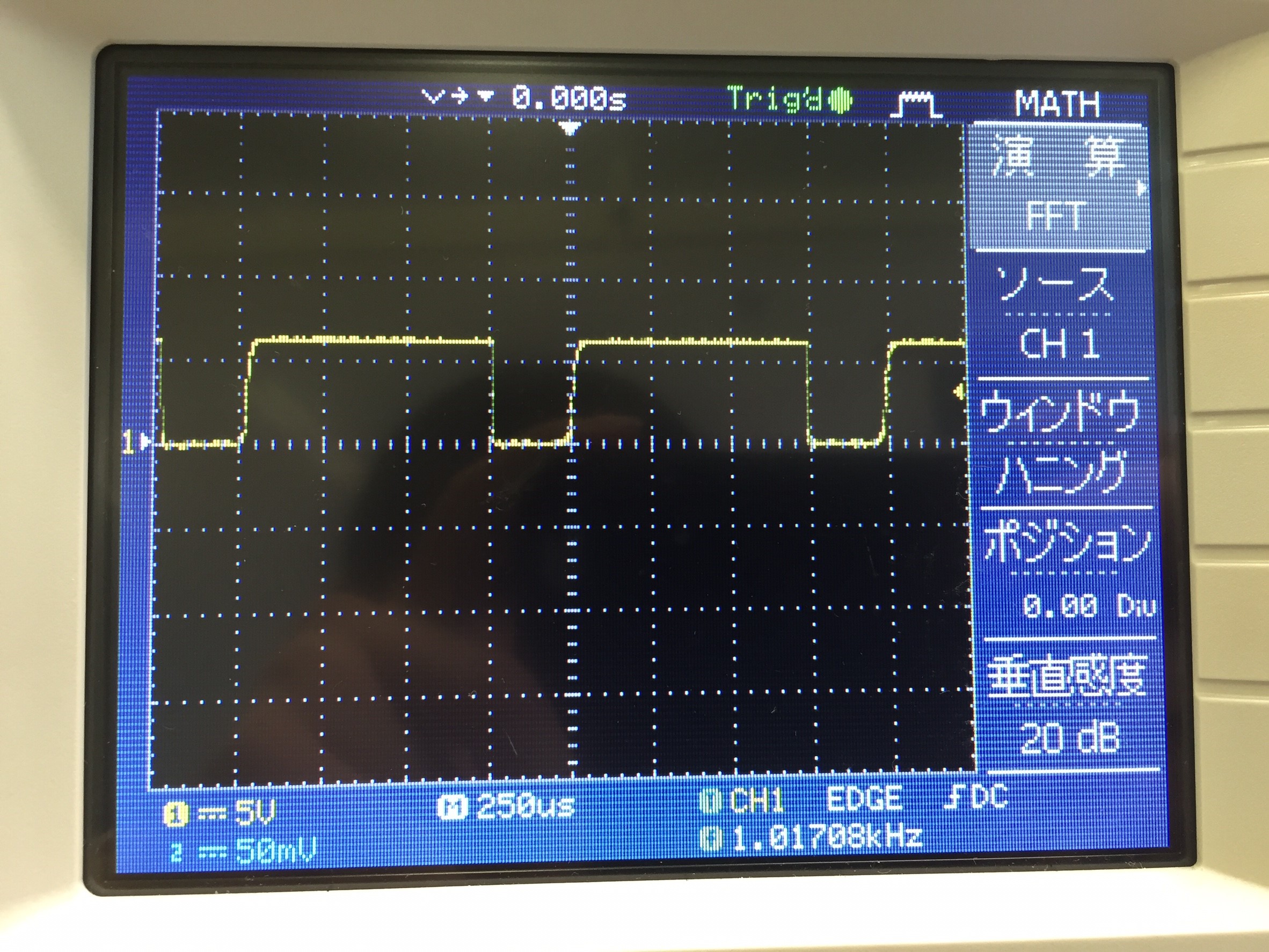
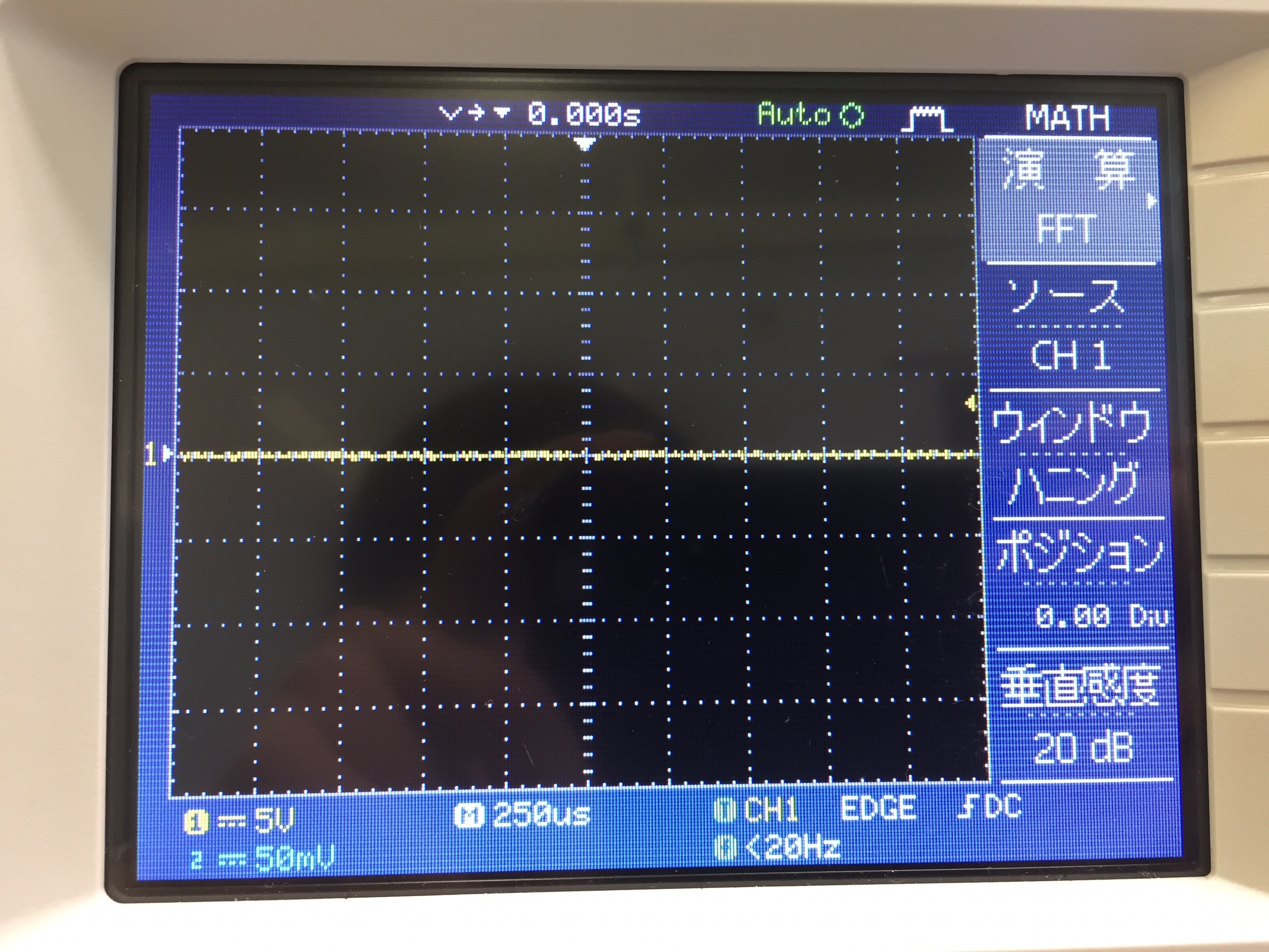
fig3.1.3.1:正転時のPWM1 fig3.1.3.2:正転時のPWM2 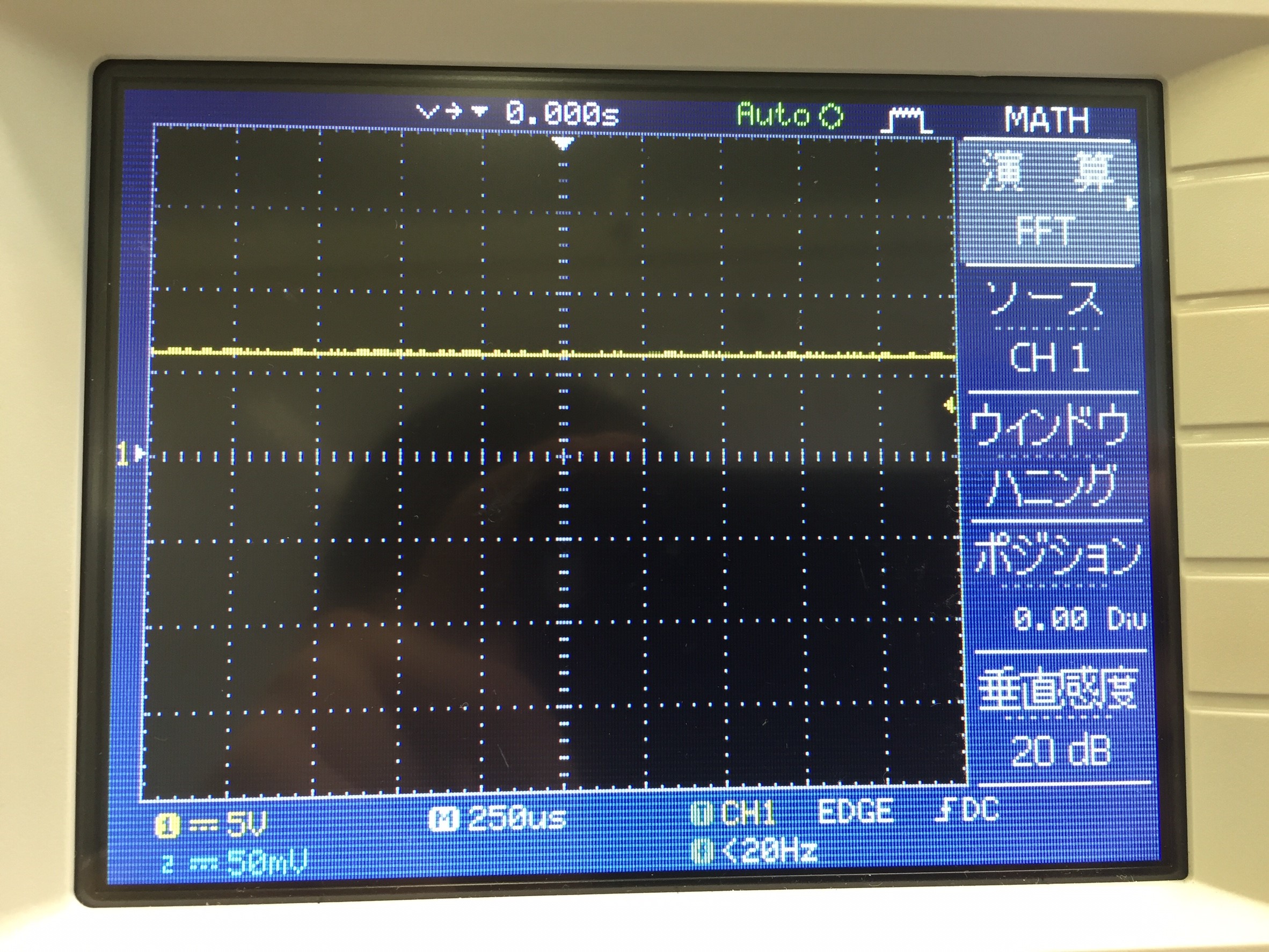
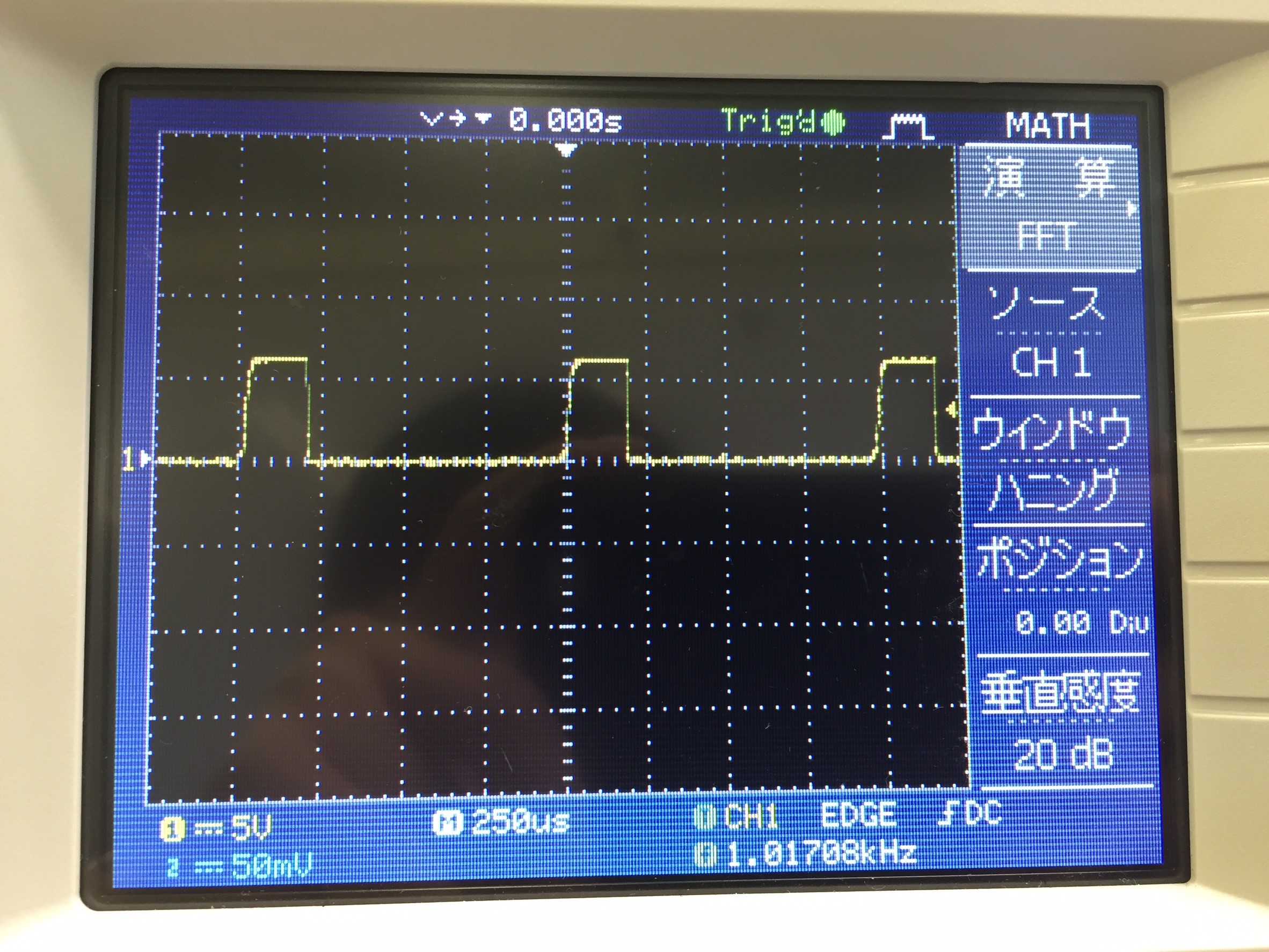
fig3.1.3.3:正転時のPWM3 fig3.1.3.4:正転時のPWM4 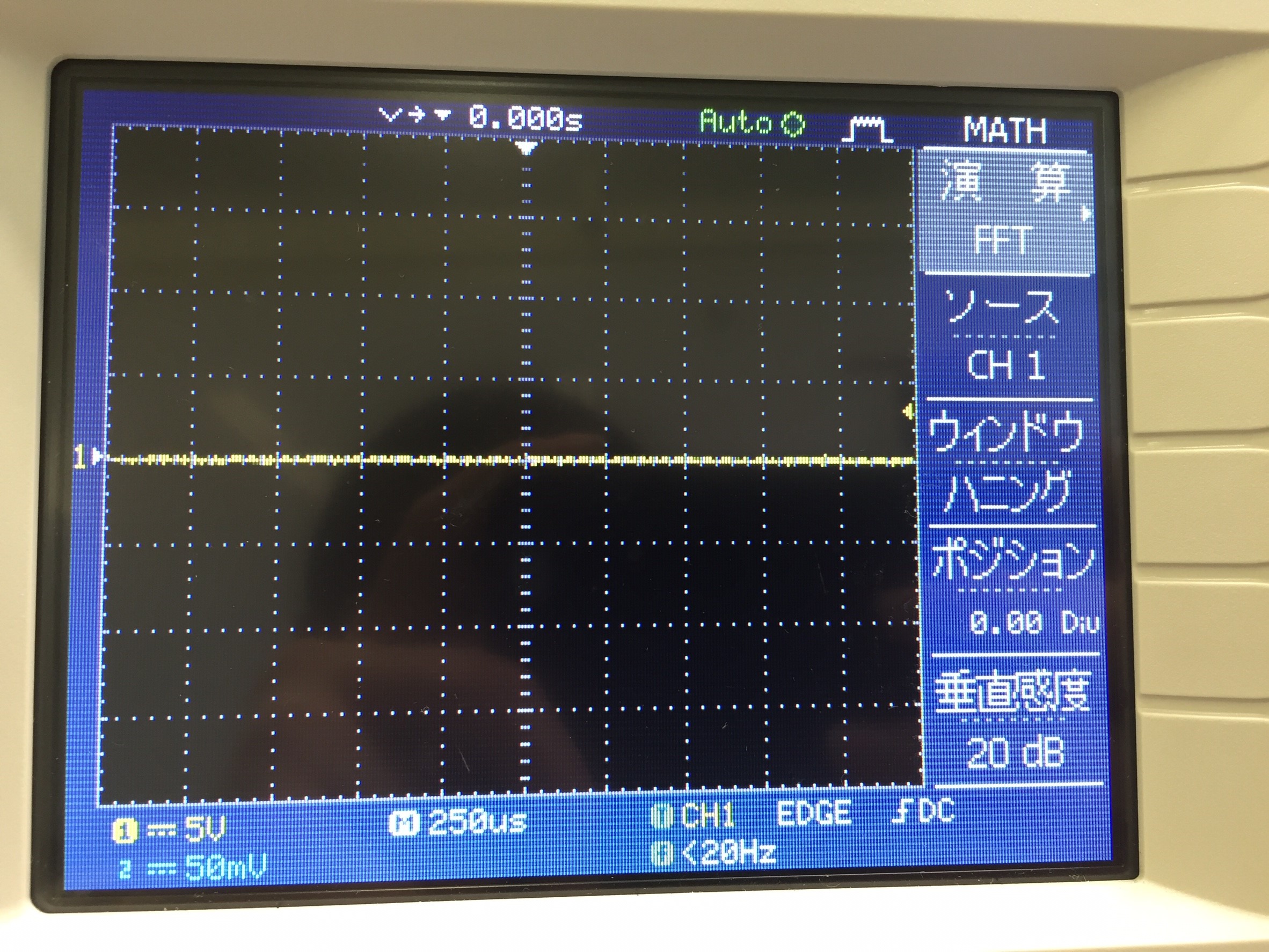
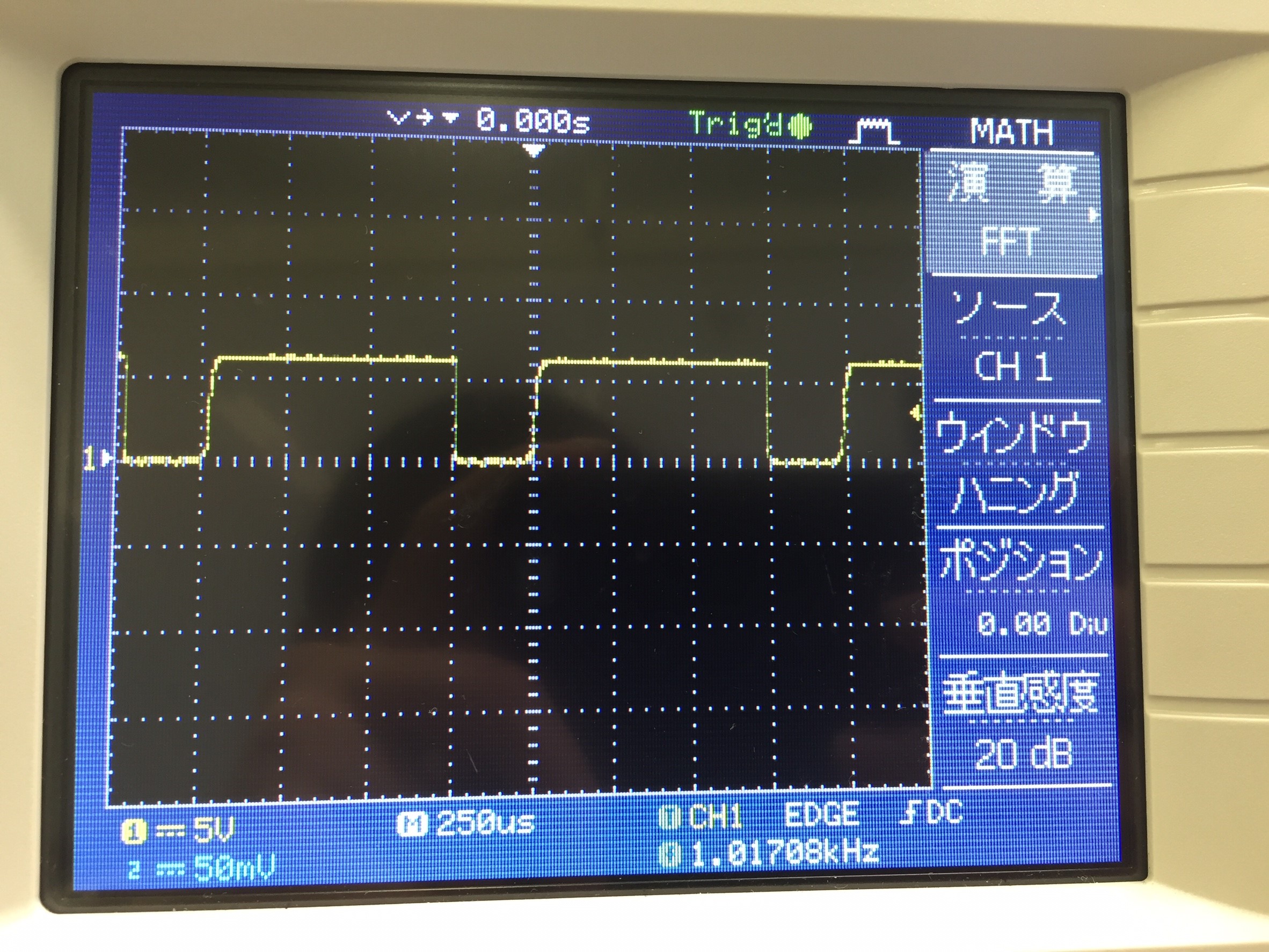
fig3.1.3.5:逆転時のPWM1 fig3.1.3.6:逆転時のPWM2
正転のときは20pin(fig3.1.3.1)と26pin(fig3.1.3.4)の波形がPWM信号で、22pin(fig3.1.3.2)には0V、24pin(fig3.1.3.3)には常に約5Vが出ていることを確認できた。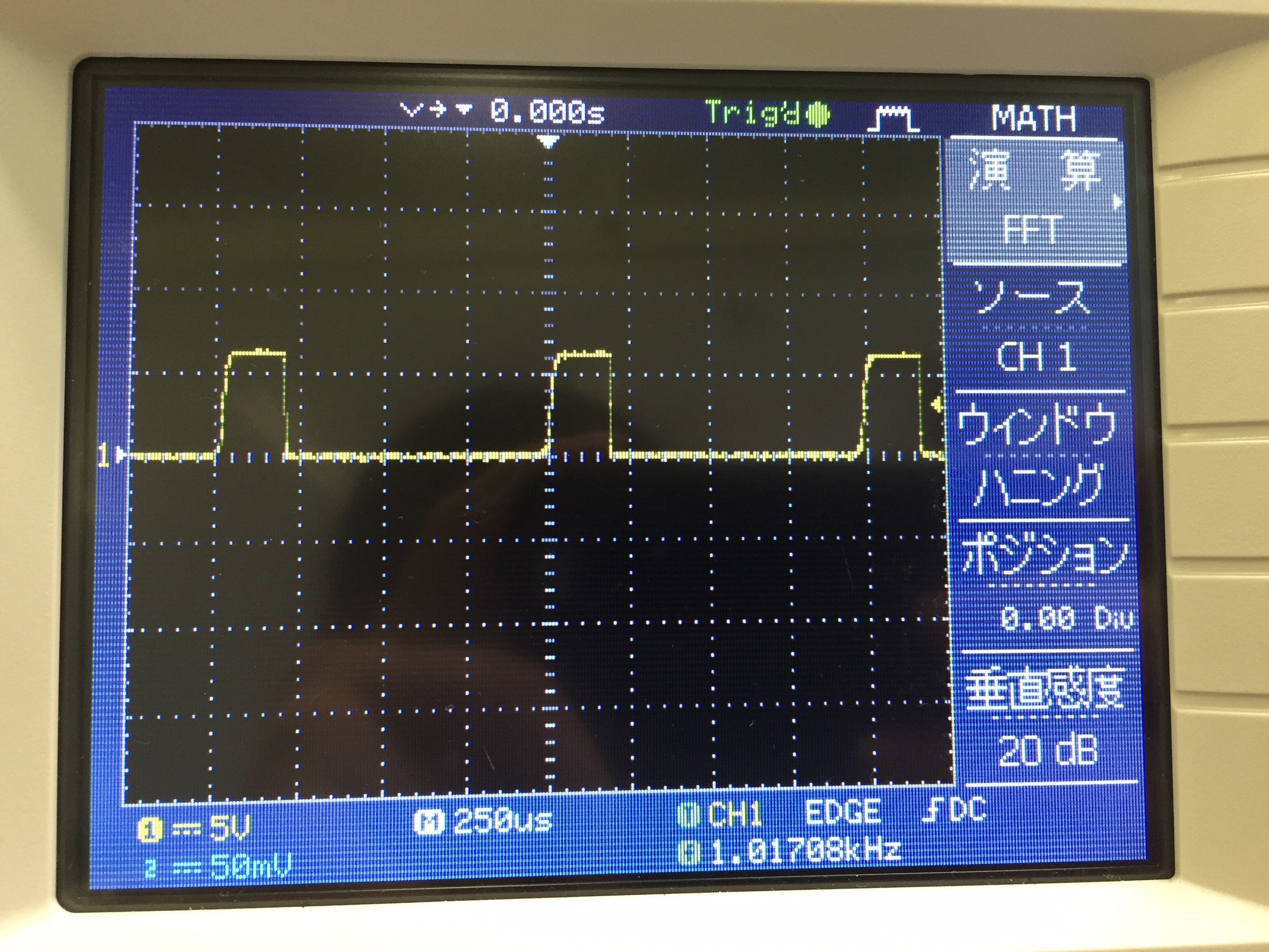
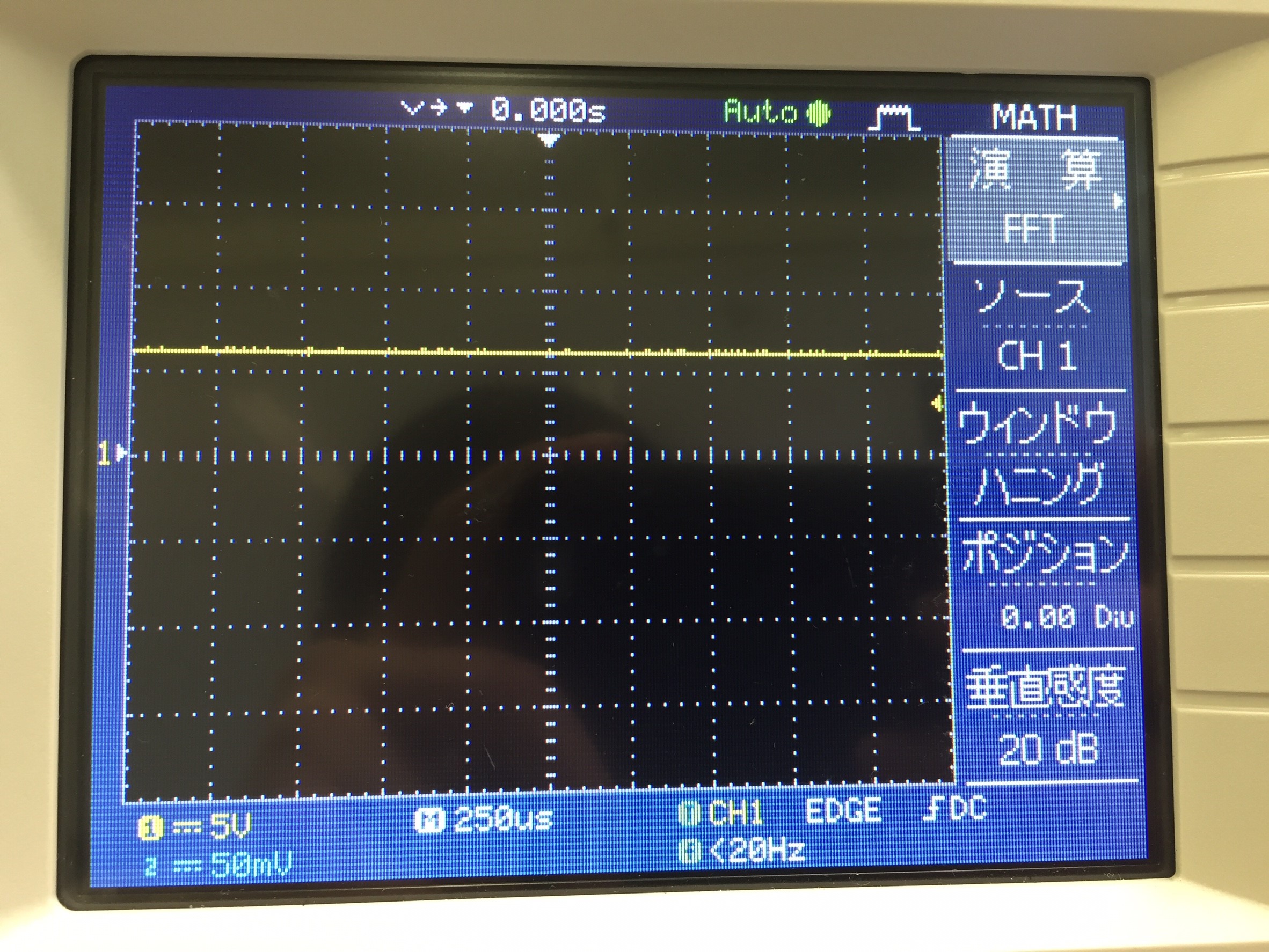
fig3.1.3.7:逆転時のPWM3 fig3.1.3.8:逆転時のPWM4
逆転のときは22pin(fig3.1.3.6)と24pin(fig3.1.3.7)の波形がPWM信号で、20pin(fig3.1.3.5)には0V、26pin(fig3.1.3.8)には常に約5Vが出ていることを確認できた。
・PWM信号の確認
1.017[kHz]周期の矩形波を確認することができた。
・モーターの正転、逆転の確認
目測により確認できた。
・PWM値の変更
目測により確認できた。
・FETの発熱
5分間モーターを回した。その際、発熱は無かった。
・長時間の走行
目測により確認できた。
・エンコーダの信号の確認
目測により確認できた。
-
ドーターボード
(1)導通チェック
パターン図とテスターを用いて行った。導通・絶縁が確認できたので、合格とした。
(2)動作試験
オシロスコープを用いてドータボードの20pinから26pinで確認したところPWMの信号波形が出力されていることが確認できたので、合格とした。
-
電源ボード
(1)導通チェック
パターン図とテスターを用いて行った。導通・絶縁が確認できたので、合格とした。
(2)動作試験
試験結果をTable2に示す。期待通りの電圧が出ていることを確認できたので、合格とした。
Table2 電源ボード 動作試験結果表 試験 入力電圧(V) 7.4 7.5 7.6 7.7 7.8 7.9 8.0 8.1 8.2 8.3 8.4 8.5 出力電圧(V) 制御系 5.40 5.40 5.40 5.40 5.40 5.40 5.40 5.40 5.40 5.40 5.40 5.40 駆動系 6.30 6.30 6.30 6.30 6.30 6.30 6.30 6.30 6.30 6.30 6.30 6.30 -
超音波センサボード
(1)導通チェック
パターン図とテスターを用いて行った。
親機、子機ともに導通・絶縁の確認ができたため合格とした。 その際、超音波センサが動作しなかったため、以下の修正を行った
- 子機2のPIC(PIC16F630)が故障していたため交換した。
- また、親機と電源の分岐基板を繋ぐケーブルが正負が逆に作られていたのでケーブルを差し替えることにより修正した。
親機、子機1、子機2の距離についての試験結果をTable3,Table4,Table5,fig3.1.4.1,fig3.1.4.2,fig3.1.4.3にまとめる。 また、角度についての試験結果をTable6,Table7,Table8にまとめる。
作業風景をfig3.1.4に示す。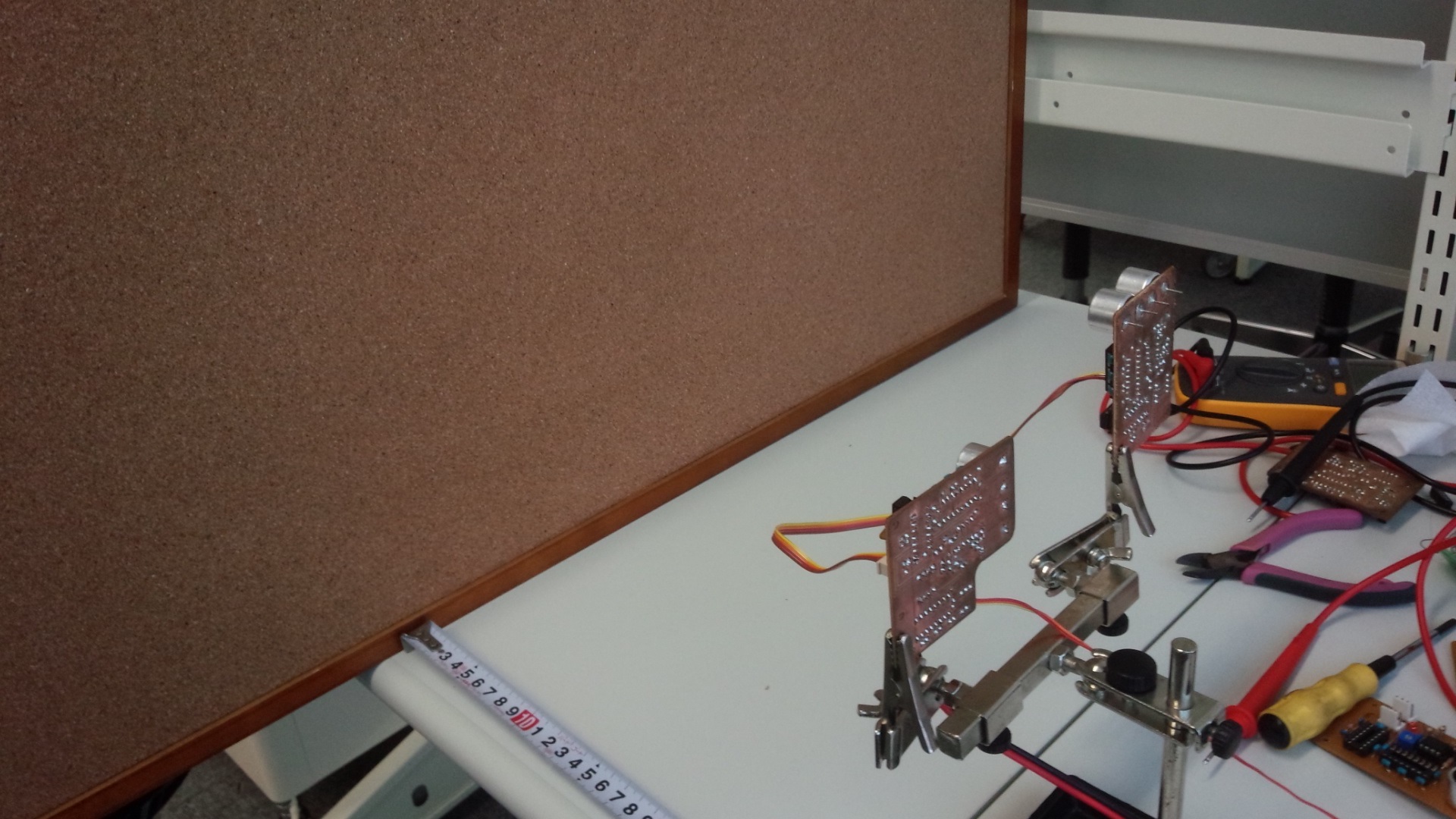
fig3.1.4:超音波センサボード試験の様子
Table3およびTable4からわかるように、測定結果に大きな誤差があるが、この誤差は線形的であり プログラムによる補正が可能であると判断したため合格とした。
Table6,Table7,Table8からわかるようにそれぞれの角度において、測定結果の平均値と実測値である50cmとの誤差が10%以内に収まっているため合格とした。
-
-
メカ
標準部品試験計画書にあるようにノギス,スケール,巻尺を用いて寸法測定を行った。 チェック担当を変更して二重チェックを行った。 寸法が基準内であったものに、一度目は緑のマーカー、二回目は赤のマーカーを用いて印を記入した。 -
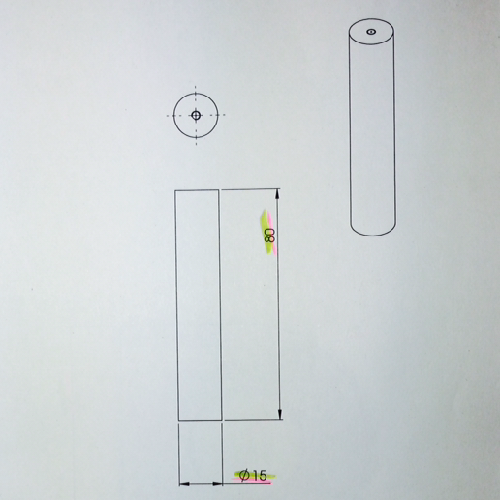
バッテリーボード支柱[支柱(小)](fig3.2.5)
寸法誤差が規定の範囲内だったので、合格とした。
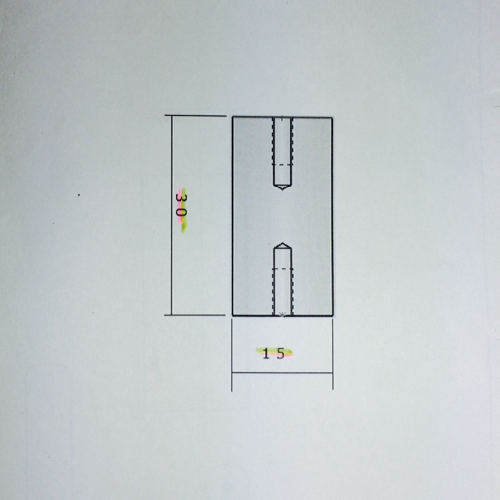
fig3.2.5:バッテリボード支柱[支柱(小)]
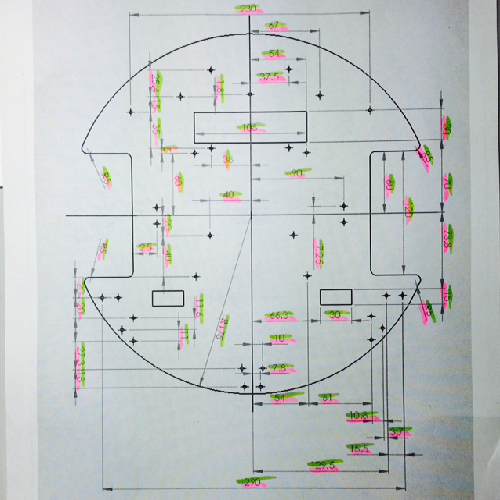
超音波センサ取付板(fig3.2.6)
寸法誤差が規定の範囲内だったので、合格とした。
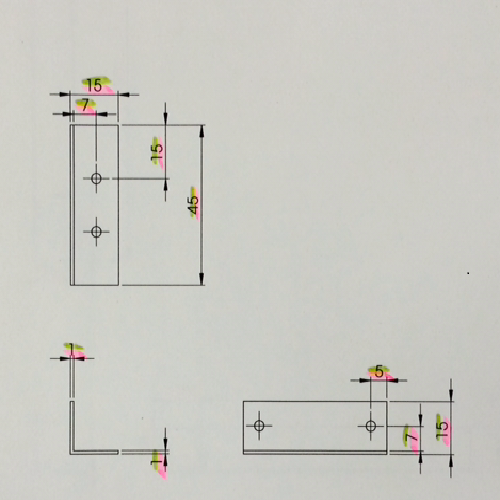 |
| fig3.2.6:超音波センサ取付板 |
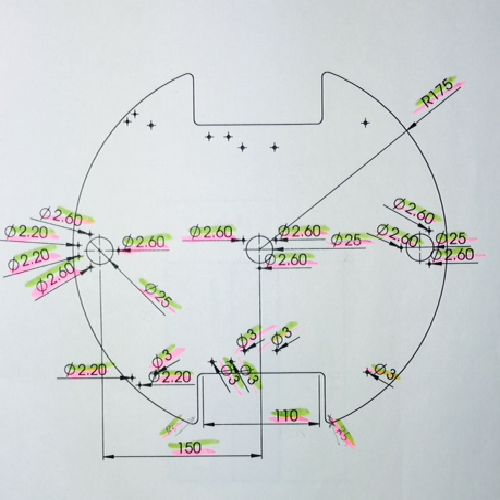
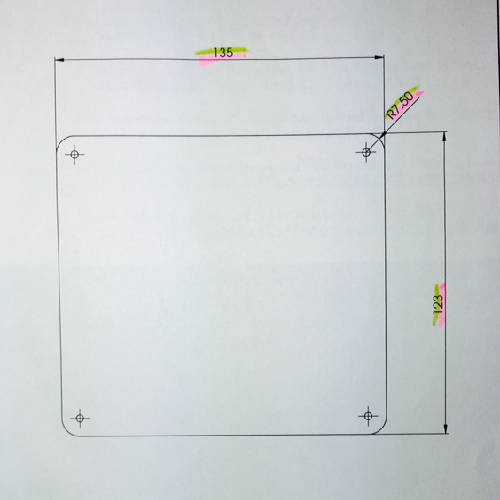
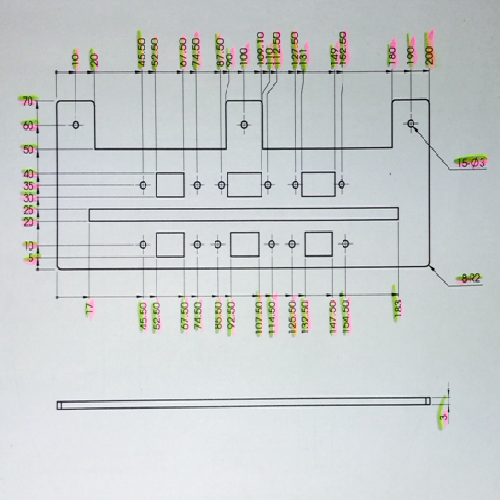
電源ボード取付板(fig3.2.7)
寸法誤差が規定の範囲内だったので、合格とした。
 |
| fig3.2.7:電源ボード取付板 |
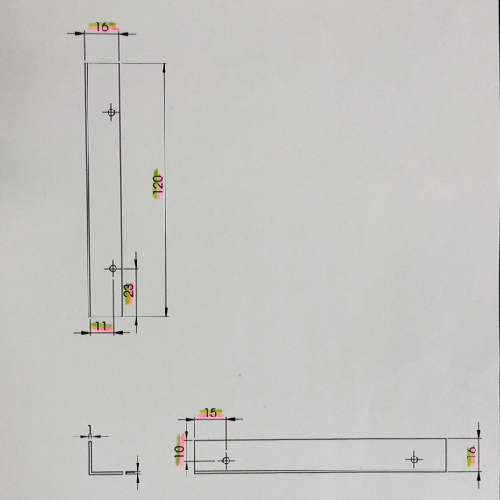
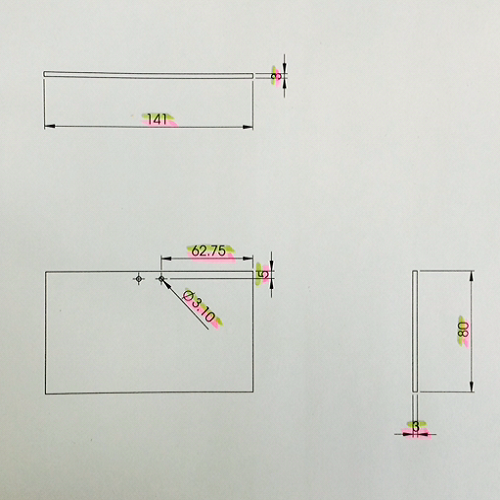
USB固定金具(fig3.2.8)
寸法誤差が規定の範囲内だったので、合格とした。
 |
| fig3.2.8:USB固定金具 |
バンパ(fig3.2.9)
寸法誤差が規定の範囲内だったので、合格とした。
 |
| fig3.2.9:バンパ |
モータエンコーダマウント(fig3.2.10)
寸法誤差が規定の範囲内だったので、合格とした。
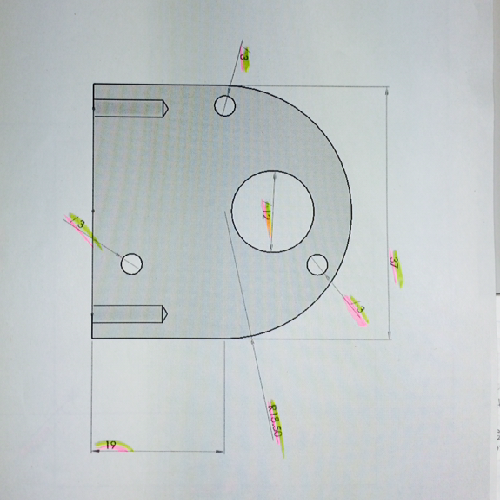 |
| fig3.2.10:モータエンコーダマウント |
ロータリエンコーダマウント(fig3.2.11)
寸法誤差が規定の範囲内だったので、合格とした。
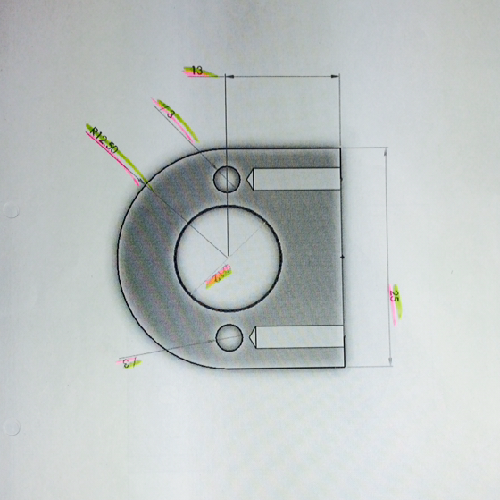 |
| fig3.2.11:ロータリエンコーダマウント |