はじめに
本ドキュメントは、 MIRS1502でのオリジナルのシステム基本設計書である。
動作シナリオ
Figure 1 にMIRS1502の動作シナリオを示す。
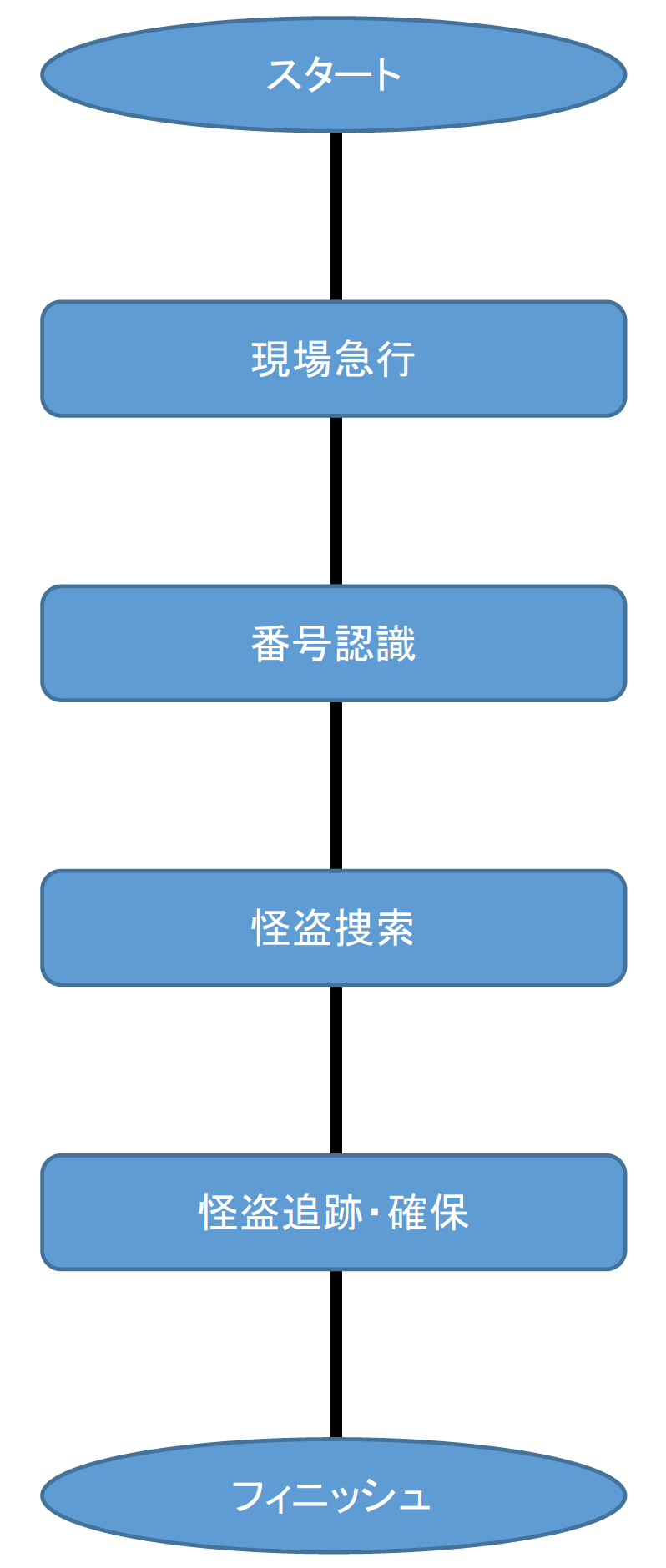
Figure 1. 動作シナリオ
機能・性能
目標タイム
競技開始から20秒以内に怪盗を発見し、その後10秒以内に確保する。
またその間、壁に一切ぶつからない。
各プロセスに対する目標タイムを、Table 1 に示す。
Table 1. 目標タイムプロセス 目標タイム 現場急行 10 s 画像認識 2 s 怪盗捜索 8 s 怪盗追跡・確保 10 s 合計 30 s 基本機能
競技会を行う上で必要な機能を以下に示す。
走行
・回転をせず全方位に移動
・基本 60 cm/s (Max : 90 cm/s) での移動
数字認識
・2 s以内に完了
怪盗捜索
・赤外線センサを用いて場所を把握
・カメラにより、怪盗の色(赤)を認識し探す
拡張機能
競技会をより良く攻略するために搭載する機能を以下に示す。
ただし、これらはアジャイル要素として開発する。
・サーボモータの上にカメラを固定して、カメラが回転するようにしたものを、タワー上部に搭載する。
・シャーシに色のついたセロハンを貼り付け、装飾をする。
システム構成
メカニクス構成
メカニクスの開発概要を Table 2 に示す。
Table 2. メカニクス開発概要項目 目的 機体の小型化 壁に当たりにくくするため。 オムニホイールの搭載 回転をせず、全方位移動を実現するため。 主要基板のタワー構造化 狭いスペースでも基板を多く搭載できるため。
Figure 2 に、機体外形を示す。
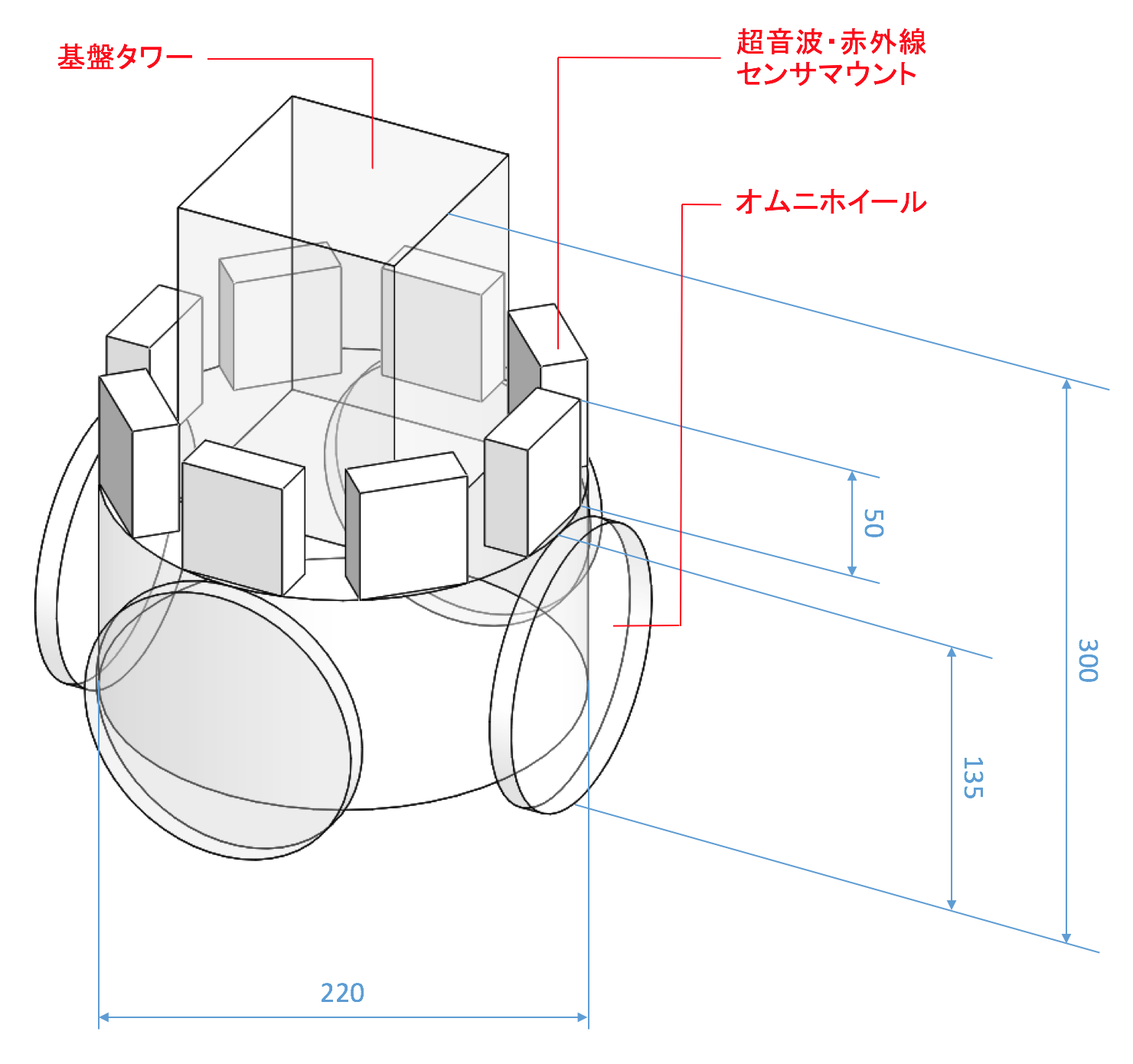
Figure 2. 外形図
製作する主要部品を Table 3 に示す。
Table 3. メカニクス主要部品一覧部品 備考 上下段シャーシ 小型化及びオムニホイールの搭載により、シャーシの設計が必要となる。 モータマウント ×2 オムニホイールを4つ使用するため、2つ新たに製作する。 超音波・赤外線センサマウント ×8 超音波・赤外線センサ1つずつを1つのマウントに組み込む。 基板用マウント MIRS1502ではタワー構造にする。
バンパ オムニホイールの導入により、新たに製作する。 エレクトロニクス構成
エレクトロニクスの開発概要を Table 4 に示す。
Table 4. エレクトロニクス開発概要
配線概念図を、Figure 3 に示す。項目 概要 実現方法 担当者 電源ボードの改良 電圧の安定化を図る。 コンデンサを取り付ける 大川・北原 赤外線センサの導入 怪盗のいる方向を把握するため、8個新規購入する。 赤外線センサの新規購入 大川 超音波センサの増設 全方位の障害物を把握するため、2個から8個に増設する。 超音波センサの追加購入 大川 Arduino Megaの導入 センサからの信号処理のため。 Arduino Megaの新規購入 北原・大川・飯田 モータの増設 オムニホイールを4つ使用するため、モータを2個から4個に増設する。 既存のものを使用 北原 FPGA回路の書き換え モータを増設するため。 北原・大川 モータ制御ボードの作成及び改良 モータを増設するため、新規作成する。
また、機体の小型化により、基板も小さくする必要がある。大川・北原 ドータボードの改良 モータ用ポートの増設のため。
また、小型化のため、1つのボードで4つのモータ用にするため。北原・大川
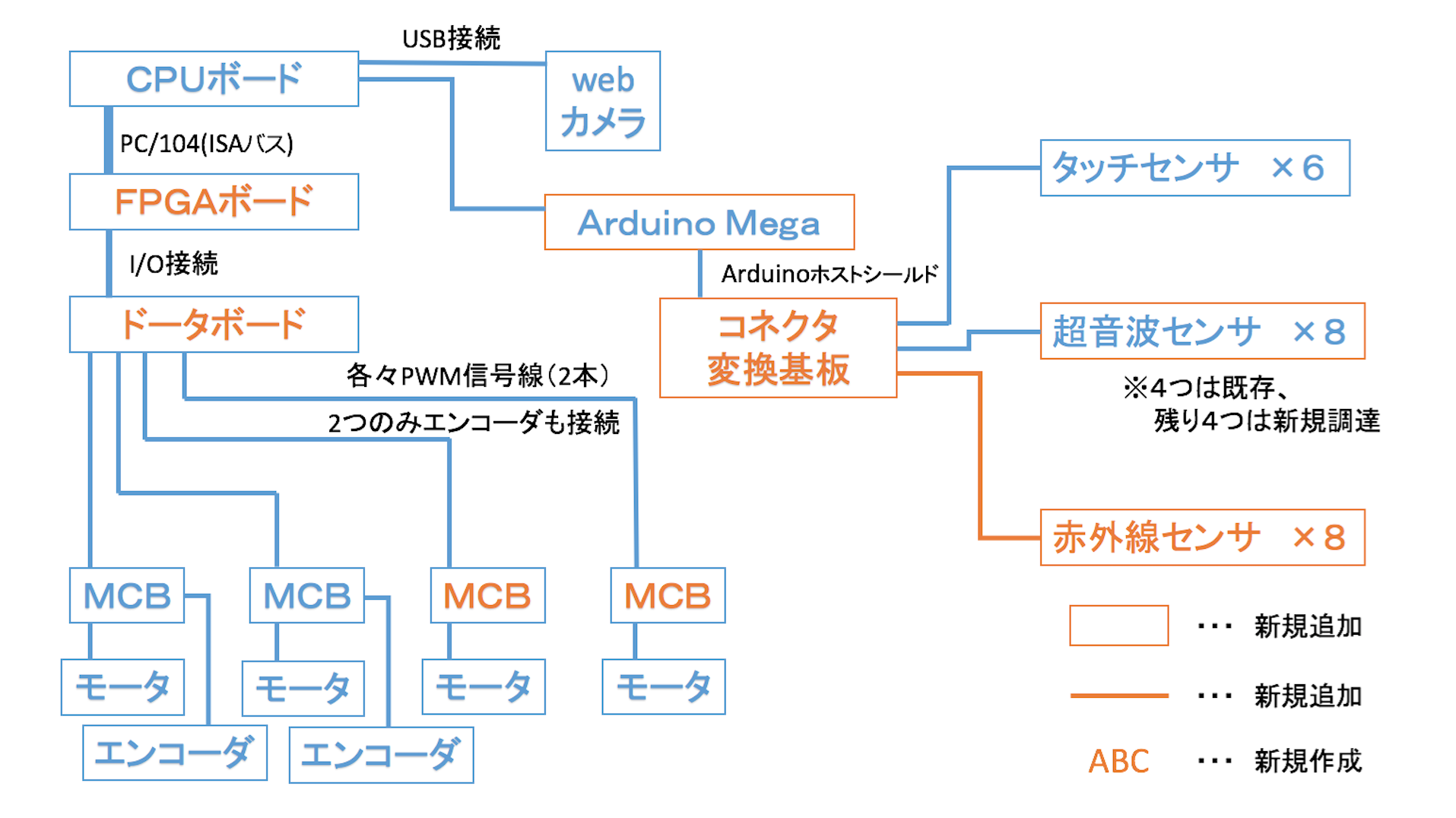
Figure 3. 配線概念図
使用するボードを Table 5 に示す。
Table 5. ボード一覧
使用する部品を Table 6 に示す。ボード 役割 改良点 電源ボード コンデンサとコネクタを変更 CPUボード 変更無し FPGAボード 内部回路の書き換え モータ制御ボード 新たに4枚作成 ドータボード モータを接続するポートを増やす
新規作成Arduino Mega センサの情報を処理し、CPUに渡す 新規購入 Arduinoシールド センサをArduinoに接続する 新規購入
Table 6. 使用部品一覧ソフトウェア構成
ソフトウェアの開発概要を Table 7 に示す。
Table 7. ソフトウェア開発概要
CPUで使用するモジュールの構成図を Figure 4 に示す。項目 内容 オムニホイールによる走行 方向と速さを指定して走行。
超音波センサを用いて障害物を回避。
電子コンパスを用いて直進補正。Arduinoによる各種センサ処理 以下のセンサの処理を一括して行う。
・接触センサ
・超音波センサ
・超音波センサ
・赤外線センサ
・電子コンパス
カメラ用サーボモータの回転制御数字、怪盗(赤い風船・バンパ)の認識 ボード上の数字を認識する。
怪盗の赤い風船・バンパを認識する。サーバーとの通信 認識した数字をサーバーに送信する。
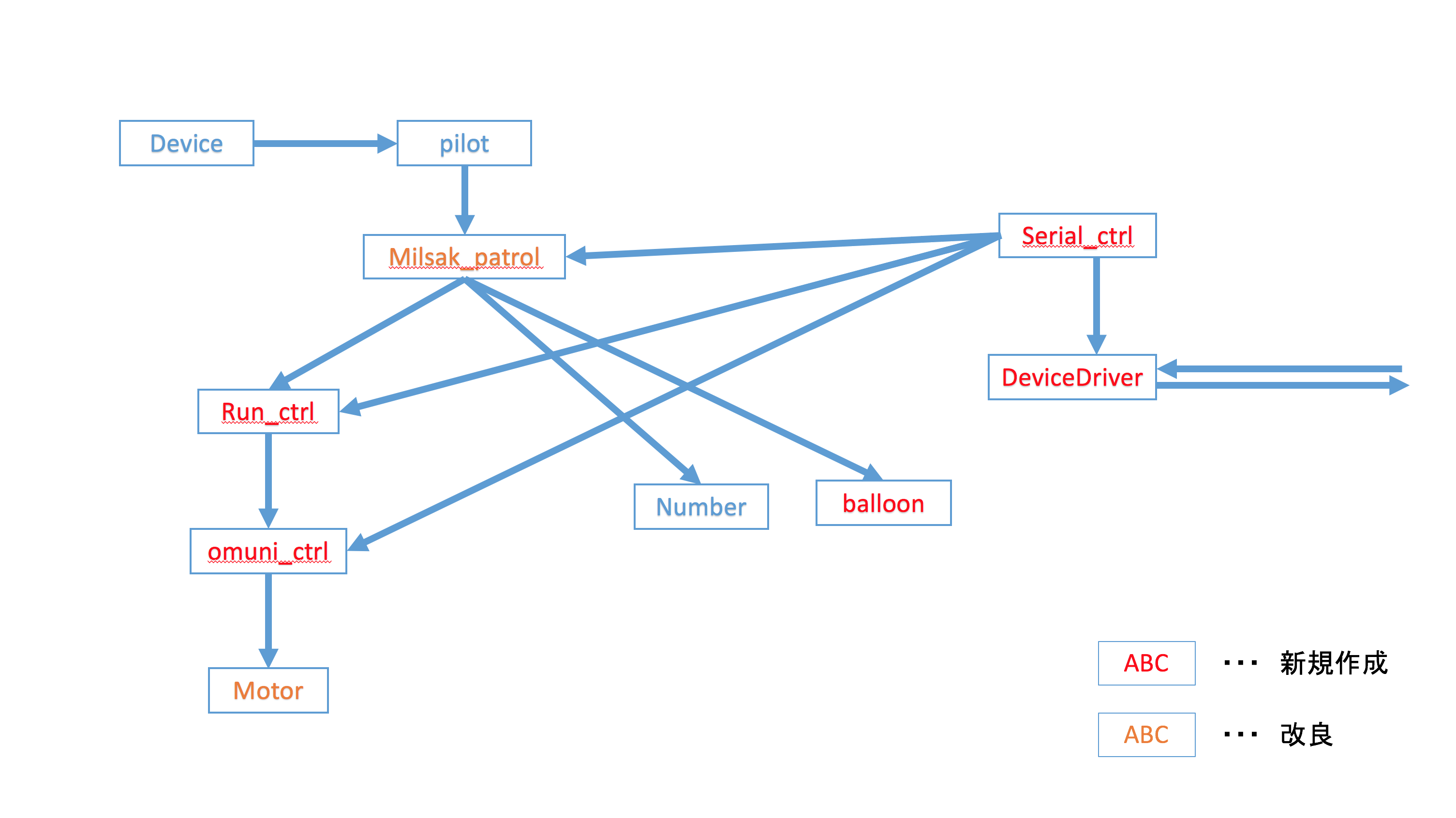
Figure 4. モジュール構成図(CPU)
Arduinoで使用するモジュールの構成図をFigure 5 に示す。
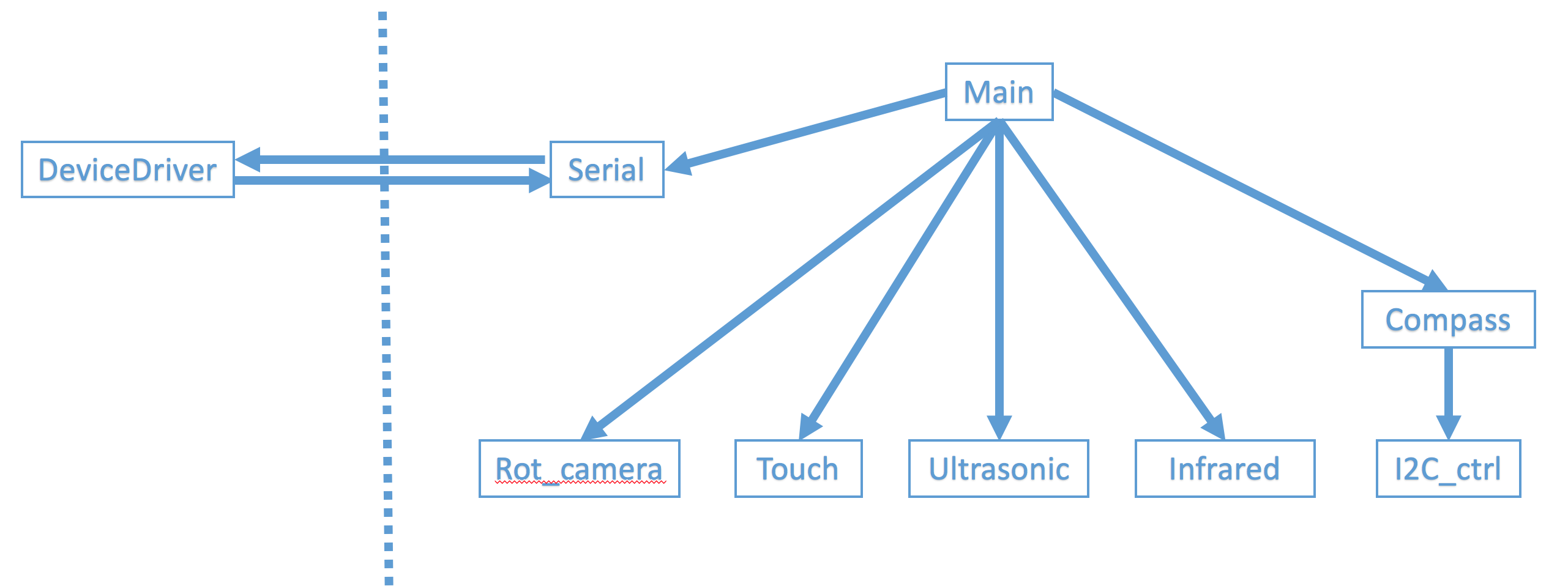
Figure 5. モジュール構成図(Arduino)
CPU で使用するモジュールを Table 8 に示す。
Table 8. モジュール一覧(CPU)
Arduino で使用するモジュールを Table 9 に示す。モジュール名 説明 改良点 Device デバイスドライバの有効化 pilot 全体の制御を行うモジュール Mirsak_patrol 怪盗追跡を行うモジュール 競技会用にプログラムを開発する Run_ctrl 走行制御をするモジュール omuni_ctrl オムニホイールの制御をするモジュール Motor モータを制御するモジュール モータの数が2個から4個に増えたため、それに対応する Number ボードの数字認識を行うモジュール balloon 風船の認識を行うモジュール Serial_ctrl Arduinoを制御するモジュール
Table 9. モジュール一覧(Arduino)モジュール名 説明 DeviceDriver Arduinoとの通信を司るデバイスドライバー Serial シリアル通信(USB)を行うモジュール Main センサの信号処理を行うモジュール Rot_camera カメラの回転の制御を行うモジュール Touch タッチセンサの信号処理を行うモジュール Ultrasonic 超音波センサの信号処理を行うモジュール Infrared 赤外線センサの信号処理を行うモジュール Compass 電子コンパスの信号処理を行うモジュール I2C_ctrl I2Cの通信制御
購入部品一覧
購入部品一覧を Table 10 に示す。
Table 10. 購入部品一覧
| 物品名 | 個数 | 値段 | URL | 備考 |
|---|---|---|---|---|
| フォトトランジスタ5mm丸型(赤外線) | 10 | 200円 | http://akizukidenshi.com/catalog/g/gI-04211/ | |
| 超音波距離センサ | 4 | 1,600円 | http://akizukidenshi.com/catalog/g/gM-08762/ | |
| Arduino Mega2560 Rev3 | 1 | 5,800円 | http://akizukidenshi.com/catalog/g/gM-07381/ | |
| アクリル板 (3mm) | 1 | 3,900円 | http://www.acryl.jp/material/boad.html | 1,100 (mm) × 1,300 (mm) |
| アクリル丸棒12Φ (1m) | 1 | 820円 | http://www.acryl.jp/material/acrylroundbarbubbleroundbar.html | |
| ボールセンサDSR-542 | 8 | 3,624円 | http://www.daisendenshi.com/download/ | |
| pチャネルMOS-FET | 4 | 400円 | http://akizukidenshi.com/catalog/g/gI-00736/ | |
| nチャネルMOS-FET | 4 | 560円 | http://akizukidenshi.com/catalog/g/gI-06172/ | |
| ダイオード | 8 | 80円 | http://akizukidenshi.com/catalog/g/gI-08332/ | |
| インバータ(74LS04) | 2 | 198円 | http://jp.rs-online.com/web/p/hex-inverters/0307503/ | |
| フォトカプラ | 4 | 868円 | http://jp.rs-online.com/web/p/optocouplers/6258031/ | |
| 合計 | 18,050円 |
開発スケジュール
Figure 6 に開発スケジュールを示す。

Figure 6. 開発スケジュール