| 名称 |
MIRS1501 開発完了報告書 |
| 番号 |
MIRS-REPT-0006 |
最終更新日:2015.02.23
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2016.02.08 |
高橋元太、鈴木莉子、吉岡昂哲、野田剛志、中村勇吾、小川智司、河合将和、小川雄矢、遠藤智己、山本拓也 |
牛丸先生 |
初版 |
目次
1.はじめに
本ドキュメントはMIRS1501班の開発完了報告書である。
2. 競技会結果
1回目は現場急行 10.41[s],数字認識 失敗,怪盗確保 失敗
2回目は現場急行 11.50[s],数字認識 成功,怪盗確保 失敗
2.1 原因分析
1回目は、パラメータ調整が上手くできてなかったため、壁に突っ込んでしまい期待通りの現場急行の動作ができなかった。
記録では現場急行ができているようになっているが、実際はできているかいないかの中途半端な走行だった。
2回目は、現場急行と数字認識は成功したが、怪盗機を確保することができなかった。
後になってわかったが、怪盗機の確保は、追跡時、毎回行動の合間に停止するようにプログラムを変更すれば確保できたと思われる。
たったの2行の変更である…。
3. 開発スケジュール分析
今回の開発スケジュールと実際の開発スケジュールのリンクを以下に示す。
開発スケジュール
3.1 メカ
特に工数が多かったのはボール盤によるシャーシの加工だった。上段は第一段階、第二段階それぞれ2時間。
下段シャーシは2.5時間の時間を要した。
支柱は新規に4本作成し、小川(智)・野田の両名で合計3.5時間を要した。
組み立て時間に差が出たのは、小川(雄)は発表用PVの作成、野田はパンフレットのページ作成のため、主に小川(智)が担当したためである。
3.2 エレキ
スケジュールは少し遅れたがおおむね予定通りに行うことができた。しかし統合試験中に基板の固定がしっかりとしていなく壊れてしまったり、ケーブルの作り直しがたびたびあり新たなスケジュールを組むこととなった。そのため他の班のスケジュールを遅らせてしまった。
3.3 ソフト
ソフトではCPU-Arduino間のシリアル通信においての遅れが多く生じてしまった。そのため、その後に行う予定だった赤外線センサを用いた追跡、確保プログラムを作成する事もずれ込んでしまった。
CPU-Arduino間のシリアル通信の遅れの原因についてはソフトウェア開発完了報告書の方で説明する。また、プログラムのデバック中にコードの断線やボートの接触不良などのアクシデントがあり、開発が遅れることもあった。
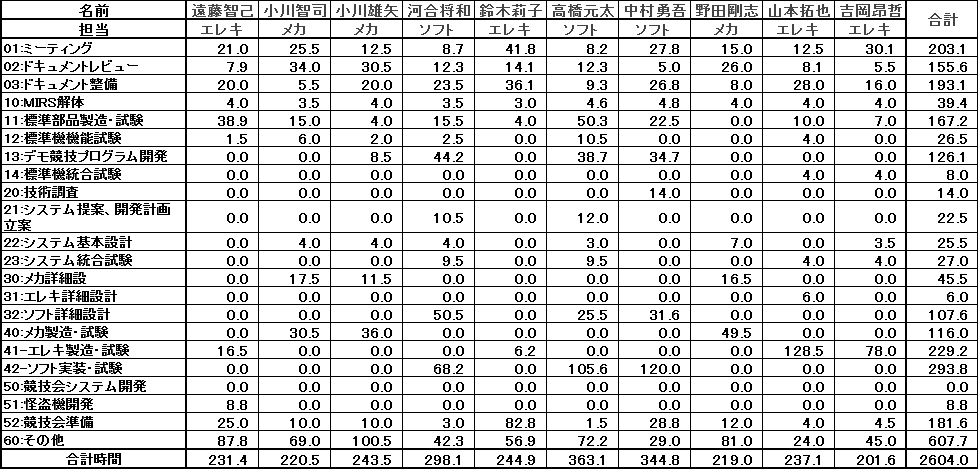
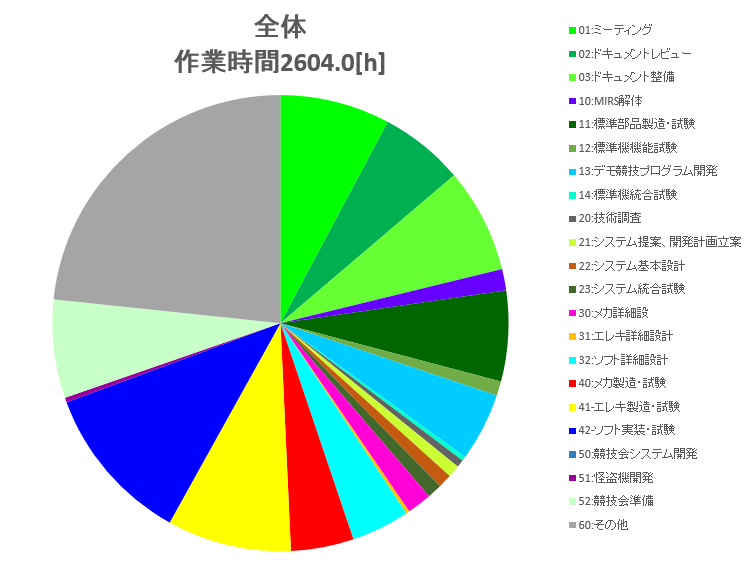
4.開発工数分析
- この工数分析は、競技会までの班員全員の工数を分析したものである。
各班員の作業時間を集計・グラフ化したものを以下に示す。
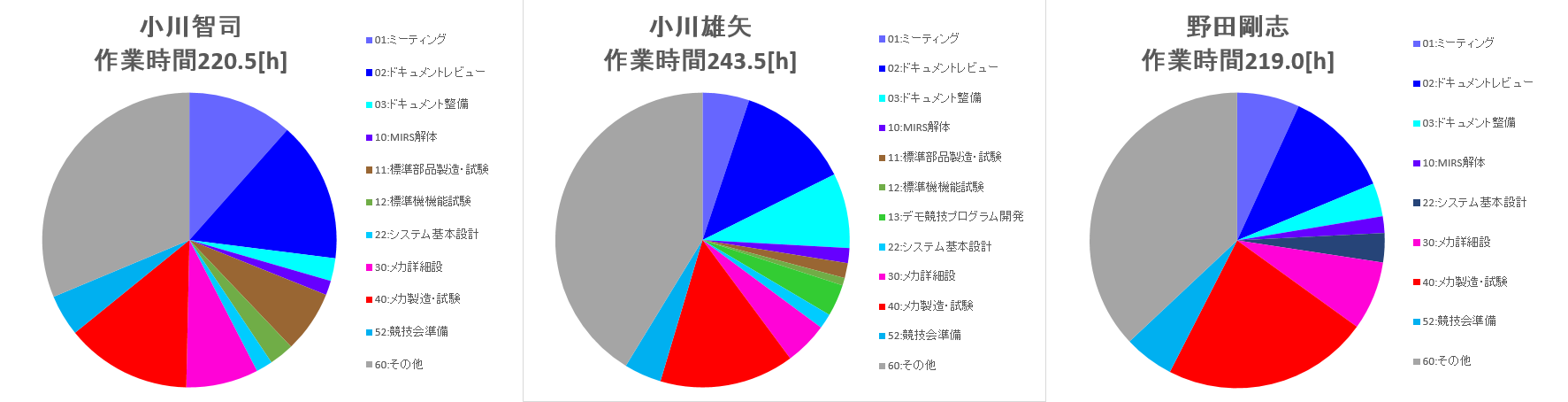
メカ
エレキ

ソフト
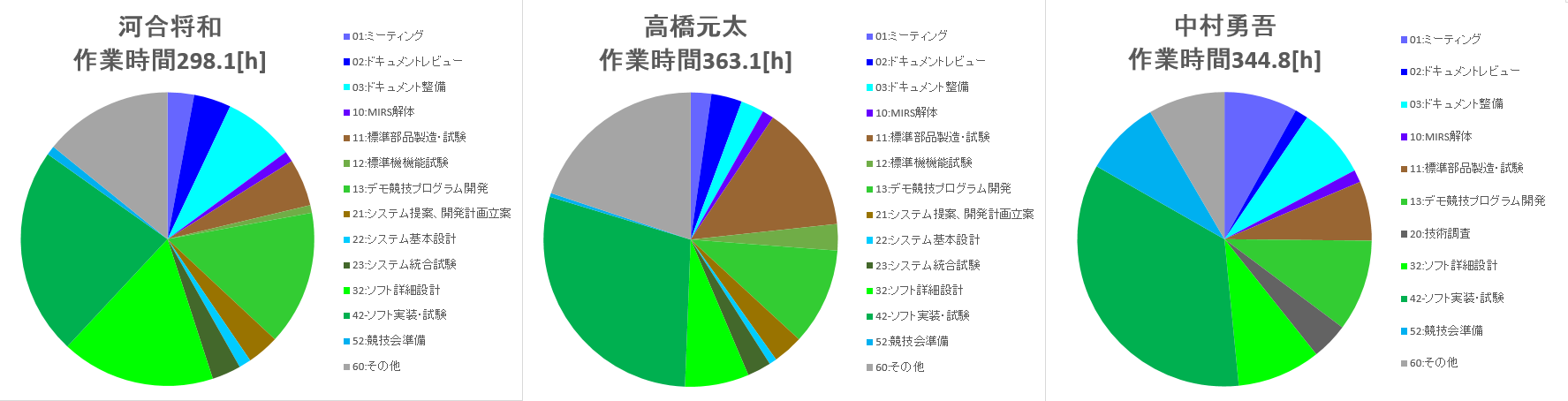
全体としては、それぞれの平均がメカ227.67時間・エレキ228.75時間・ソフト335.33時間であった。ソフトの作業時間が多くなっているが、
これは最終的に残る作業はソフトの開発で、最後のほうはメカやエレキは仕事があまりないため、そこで差が開いたのだと思われる。
「メカの完成→エレキの完成→ソフトが本格的に作業開始」という流れが基本であるため、このくらいの差になるのが妥当だと思われる。
人によって最も作業時間か多い項目が異なっているが、これにより各自がそれぞれの決められた仕事を全うしてくれたのだと思う。
最後に、意外とドキュメント関連の作業時間が長いことから、いかにレビューが大変であるかが改めてわかった。
5.総括
競技会は4位という結果に終わってしまい、目標として掲げた「全クリ」もあと一歩というところで達成できませんでしたが、
独自の動作であるYUGOカーブと走りながらの数字認識は、しっかり決めることができたのでよかったです。
メカは、1年を通して仕事があまり与えられなかったように思います。コンセプトが「いたって素朴。」とあるように、あまり大きな変更をしなかった結果です。
しかし、低重心にしたり新たな部品を追加するための最適な配置を考えてくれました。また、部品チェックを口実に何度も解体と組み立てをしてもらいました。
メカの迅速な作業のおかげで、エレキやソフトの作業を円滑に行うことができたのではないかと思います。
エレキは、とにかく何度も回路のデバックをしてもらいました。前期のうちは、はんだ付けにあまり慣れていなかったので、
接触不良や短絡しているなどの不具合が多かったですが、後期で新たに作成した基板などは、比較的よくできていたと思います。
それでも、どうしても回路やケーブルの不具合はつきもので、何度も修正をしてもらいました。おそらく、後期で一番苦戦していたのがエレキの基板の不具合だったので、
エレキのスタンスとしては、期限に間に合うように急いで作るよりもじっくり確実なものを作るようにしたほうが、最終的にはうまくいくのではないかと思いました。
ソフトはチームリーダー自身がソフト担当のため割愛
今回の製作では、工場での加工が主だったため、精度に関しては非常に高いものが出来上がった。しかし、工場での加工は時間がかかった上に、本番2週間前に工場で新規に部品を作成するという、スケジュール的にもかなり厳しいものがあった。
MIRS1501の標準機からのメカトロニクスとしての変更点は、支柱とバンパのy軸の長さ変更のみだったため、メカの仕事が少なかった。支柱とバンパの長さはCPUタワーを下段に搭載するために変更した。その為、他の担当(エレキ、ソフト)のサポートをもっとすべきだったと考えられる。例えば、エレキのケーブル作成である。
来年度以降のメカ班は、自分たちの仕事だけではなく、特に終盤にかけて仕事が少なくなるため、班員全体の手助けに気を配る必要がある。ただし、そのことで自分の仕事をおろそかにしないこと。
また、今回の材料であるアクリル板は、レーザー加工機で短い時間で加工可能であり、また透明なため内部の状況が把握し安いため非常に有用だった。
自分たちの班では基板の作り直しを何度も行ってしまった。その原因は設計が甘かったことである。設計図を作成するに当たり自分達が使う機器のことや配置したときに配線が複雑にならないかなどのことを意識していなかったからである。
また基板作成まではスケジュール通りに行うことができたが統合試験で躓くことが多かった。もっと基板ひとつひとつの試験を丁寧に行うべきでした。
ソフトは、とにかくArduinoのシリアル通信に悩まされました。軽い気持ちで手をつけてみましたが、何をやってもなかなかうまくいかず、そのせいでほかの開発に影響が出てしまったように思われます。
しかし、YUGOカーブ・走りながらの数字認識・赤外線センサによる怪盗機追跡といった、それぞれのモジュールに関してはいくつか課題は残りましたがよくできていたと思います。
しかし、かなり高精度な赤色認識モジュールを完成させたのにも関わらず、実装に至らなかったということが少し心残りではあります。後世にでも使ってもらいたいものです。
進捗管理は、作業前に行うミーティングで各班の進捗状況を報告してもらい、班員全員で共有した。
またドキュメントに置かれているスケジュール管理表にそれぞれの担当者が開始日、終了日を記入して今どこまで終わっているのか分かるようにした。
しかし、スケジュール管理表の更新は作業終了からしばらく経ってからになってしまった。
その都度更新する習慣を付ければより正確で有意義なスケジュール管理表になったと思った。
今回1班ではアジャイル開発を取り入れた。
システム提案書にあるように、第一段階から第三段階に分けて開発を行う計画を立てたが、実際には曖昧になってしまった。
競技会までにしなければならないことと残っている時間から切り捨てた開発内容もいくつかあった。
反省としては、システム提案後の開発時間がやりたい開発内容に対して少なく、また年明けから競技会までは日数がなく第二、第三段階のアジャイル開発ができずMIRSの調整に終わってしまったことが挙げられる。
しかし、第一段階では年末までに基本的な機能を実装し、ひとまず動くMIRSを作ろう、という開発は成功した。この点は大変よかったと思う。
最後に、開発計画をより詳しく挙げ開発内容に優先順位をつけ、時間とマンパワーを管理し、開発計画を更新していくことがアジャイル開発成功の鍵だと感じた。
それには進捗管理が必須であり、ミーティングには時間をかけるべきだと思った。
6.感想
6.1 高橋元太(チームリーダー,ソフト)
まず、チームリーダーとして一年間無事にやってこれた(?)のでよかったです。
基本的に何でも自分でやってしまっていたので、もっと分担させてあげられればと思いました。といっておきます。
この班だったからこそ好き放題作業できたし、この班だったからこそ何とかやってこれたのだと心から思っています。
自分はチームリーダーの器ではないですが、自由にやらせていただける役職という意味ではぴったりの役職でした。
とにかく楽しくできたので、個人的には大満足です。
ソフトとしてもYUGOカーブ・走りながらの数字認識を実現できました。また、ほぼ全てのモジュールの開発に携わることができました。
エレキの手伝いも行い、ほぼ全ての基板に手を施しました。
本当にたくさんの作業をやらせていただけたので、とても楽しかったです。
やたら作業に首を突っ込んでくるチームリーダーで、班員にもたくさん迷惑をかけたと思いますが、一年間文句を言わずについてきてくれた班員には
とても感謝しています。本当にありがとうございました。
6.2 鈴木莉子(プロジェクトリーダー,エレキ)
1班のプロジェクトリーダー兼エレキ(一応)を担当しました。作業前にはリフレッシュルームで行ったミーティングを通してMIRS開発の進渉状況を確認するのが主な仕事でした。
面白くて頼もしい班員と楽しく一年間MIRSの開発ができて良かったです。
ありがとうございました。
6.3 山本拓也(エレキ)
エレキの作業を通して、オシロスコープの使い方や基板の作り方を改めて学習できたので良かったです。個性豊かなメンバーでとても楽しかったです。
6.4 遠藤智己(エレキ、競技会運営)
エレキと競技会運営を担当しました。
主にドータボードをケーブル系の作成をしました。
エレキの仕事が全体的に遅れて、ソフト班に迷惑をかけてしまい申し訳ないという気持ちでいっぱいです。
ですが、一年間、楽しい班員と作業ができて、本当に良かったです。Thank you.
6.5 吉岡昴哲(エレキ、広報)
エレキを担当した吉岡です。
班のみんなが本当に面白くて、笑顔の絶えない職場でした。
Thank you.
6.6 中村勇吾(ソフト、競技会運営)
ソフトを担当し、Arduino-CPU通信プログラムと赤色認識プログラムを作成しました。
後期の作業時間のほとんどをArduino-CPUの通信方法の検討に使った気がします。
赤色認識プログラムはなかなか制度が良いものができましたが、時間が間に合わず、MIRSへの実装まではいかずに残念です。
今後のMIRSで改良し、使ってくれるとうれしいです。
6.7 河合将和(ソフト、ドキュメントマネージャ)
ソフトとドキュメントマネージャを担当しました。
ソフトでは主に、標準プログラムからの改良を行い、巡回、探査プログラムを作成しました。ソフト担当なのに、C言語の人並みの理解しかなく非常に苦労しました。競技会までに完璧なプログラムが出来なくて後悔もしていますが、それなりに動いたので良かったです。
あと、ドキュメントマネージャの仕事のひとつとして1年のMIRS1501の製作の流れをDatabaseに乗せてあるので下級生の参考になるといいなと思います。
6.8 小川雄矢(メカ)
今回はメカ担当で、シャーシ、支柱、バンパなどの作成、機体の組み立て等に携わりました。
全体としての感想として、メカの仕事以外はまったくといって関わっていなかったことが非常に班員に申し訳なかったと思います。
それでも、最終的にMIRS1501班としての思い描いたとおりの動きを、競技会でしてくれてくれてうれしかったですし、
一班としての一年は非常に充実していたと思います。
また、競技会のPVも担当しました。友人がやっていたので何とかなるだろうと思っていましたが、使用したこのツール「AVIUTL」、思ったより
敷居が高く、結構な時間がかかってしまいました。まあ、それも含めていい経験になったと思っています。
6.9 小川智司(メカ)
メカを担当し、シャーシや支柱の加工を行いました。工場での加工を再度学ぶことができて良かったです。
MIRS1501の仲間と1年間作業ができてとても楽しかったです。ありがとうございました。
6.10 野田剛志(メカ)
私はMIRS製作を通して、ものづくりのプロセスと作業を文章にすることの重要性を学びました。
みんなでどんなものを作りたいかを話し合い、それを文章にして企画を通し、限られた日程の中で加工をする。
これらの経験は、個人では体験することのできない貴重な経験だと思います。
機体にただ穴を開ける・センサを搭載するだけでも文章にしなければいけない。文章の重要性と製品開発の苦労を感じました。
一班の班員としては、プログラムが書けない・基板が作れない・工具の使い方がわからない私ですがみんなに救われて完成することができました。
マイナスの面しか書いてませんが、まとめると楽しかったです。おっけおっけ。
7. リンク