本チームでは、モータ・モータドライバの選定に際して、MIRS機体を想定した負荷に対する各モータの挙動を調べた。この結果を
MIRS1041 標準モータ試験報告書に示す。
これより、旧モータ3633では負荷に対して十分な回転速度を得られないと判断し、新モータ380を使用することを決定した。また、380が消費する電流は定常状態で3A程度であったため、連続電流定格が1Aである現行のモータドライバTA7267BPを使用することはできないと判断した。
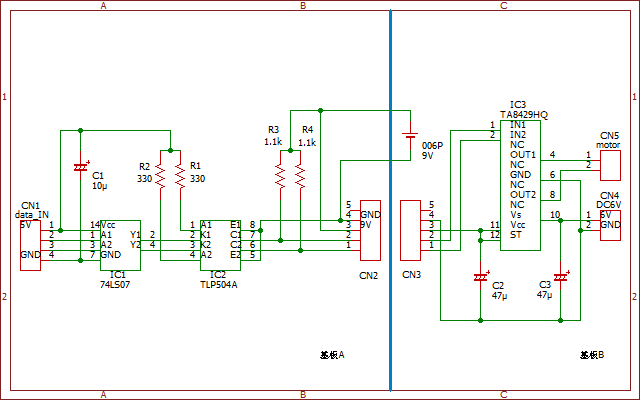
これに代わって、新規作成するモータ制御ボードでは、連続電流定格が3AであるモータドライバTA8429HQを採用する。このドライバの特徴を以下に示す。
- 出力電流 3A(AVE.)、4.5A(PEAK)
- 制御側動作電圧 7~27V
- 駆動側動作電圧 0~27
TA8429HQは、制御側の動作電圧として7V以上を必要とするため、これに合わせて回路を一部変更する。バッテリの定格電圧が7.2Vであることから、バッテリから安定して7Vを供給するのは難しいため、制御側の電源には9Vの角型電池を用いる。一方で、駆動部の電圧は6Vで足りるため、今まで通り電源ボードから直接接続する。
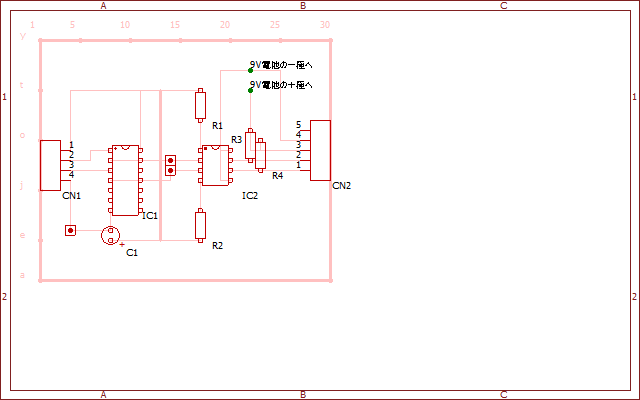
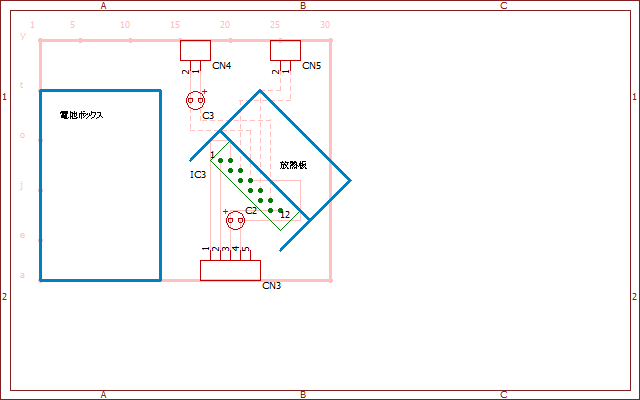
また、モータドライバの発熱および、放熱板の取るスペース、9V電池を置くスペースを考慮して、基板を2枚に分ける。