
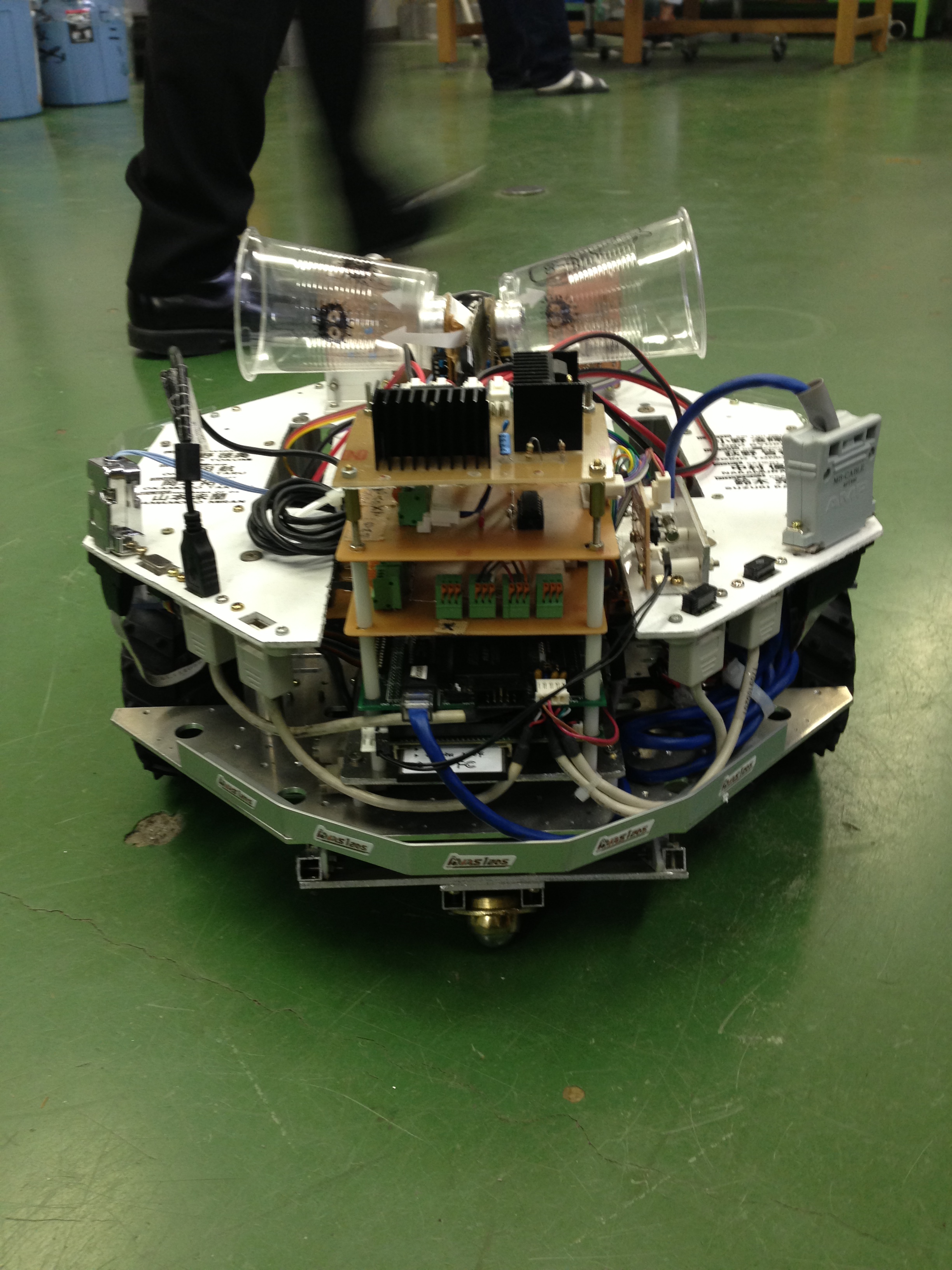
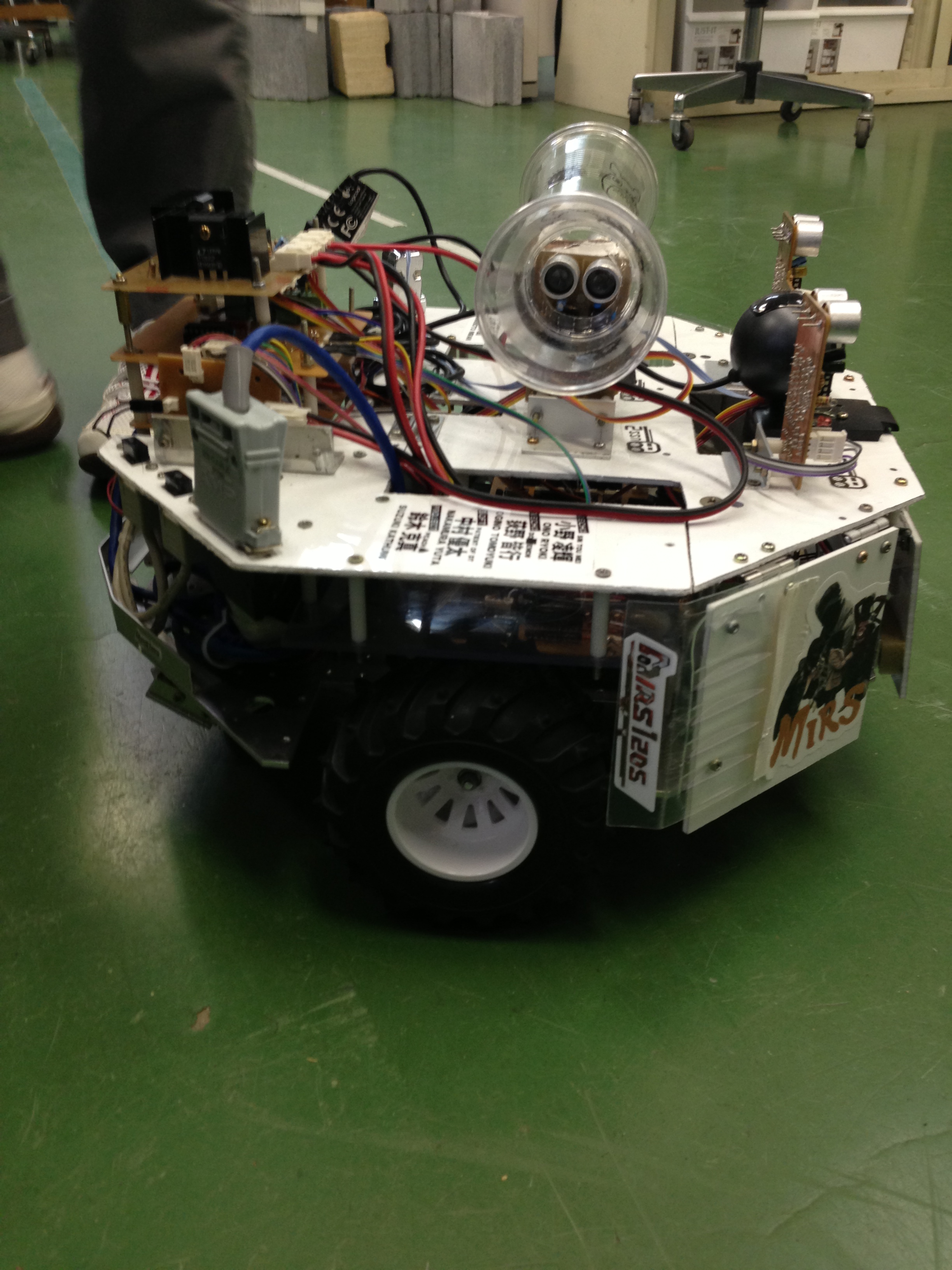
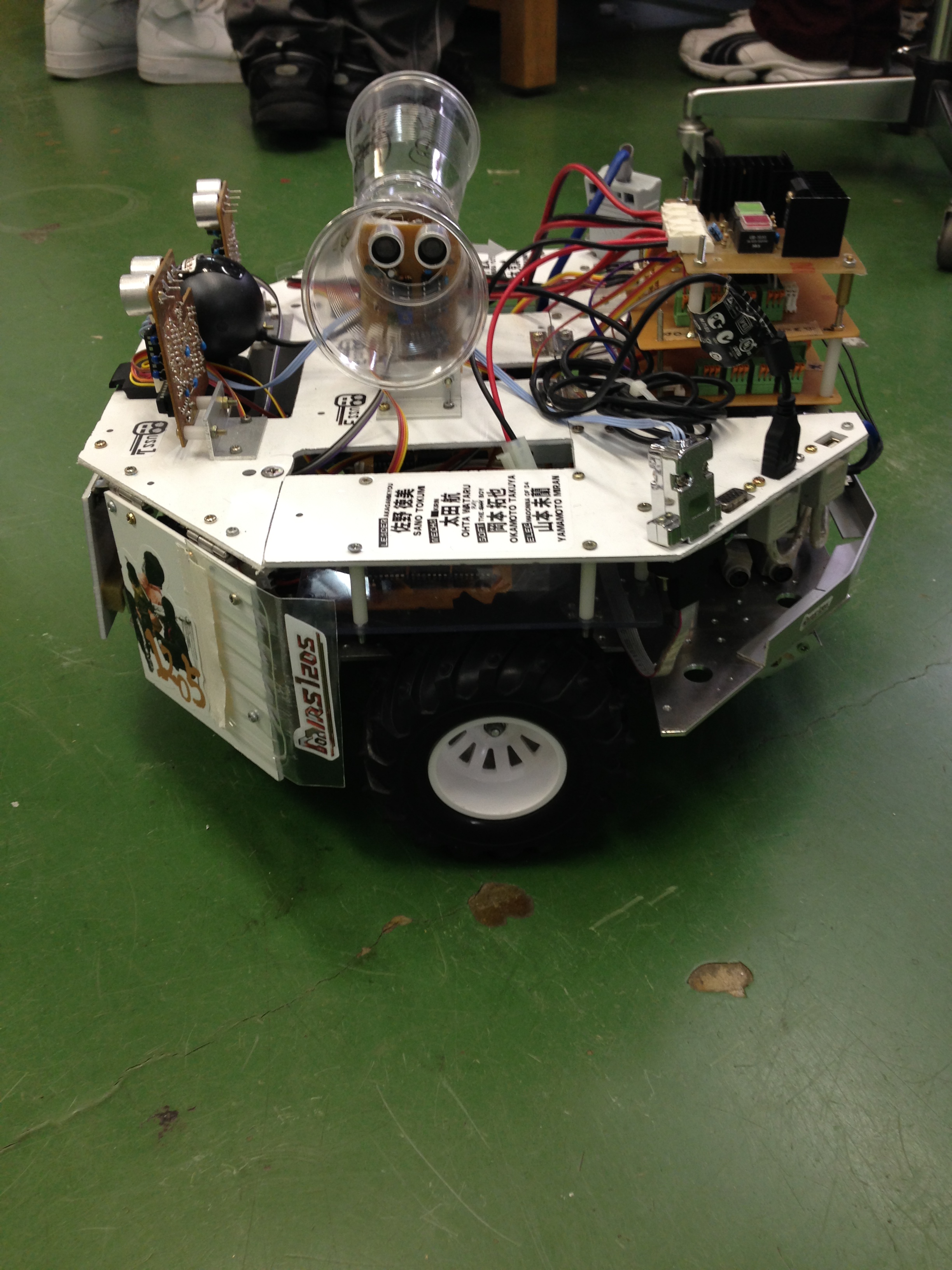
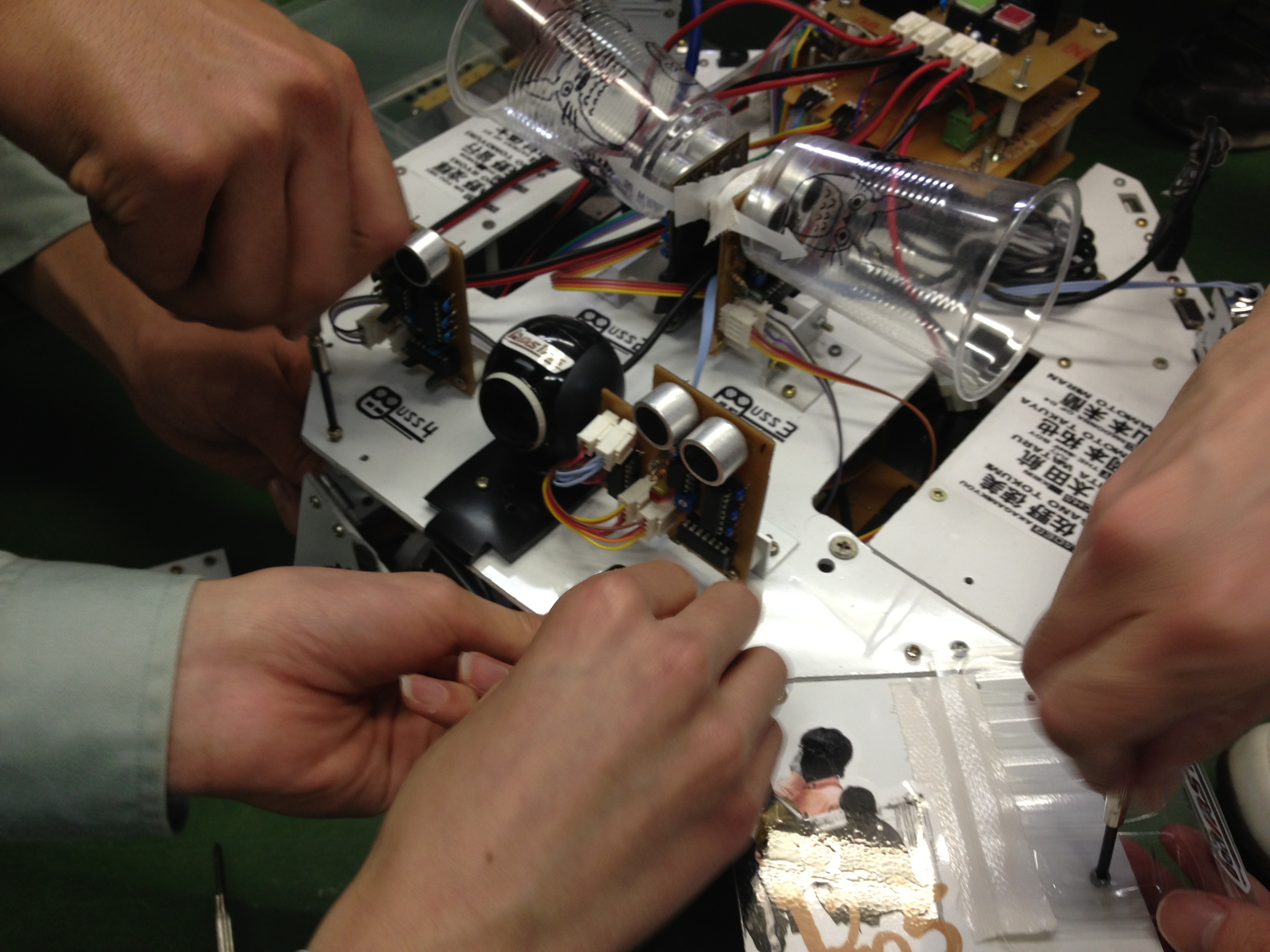
| 名称 | MIRS1205 解体報告書 |
|---|---|
| 番号 | MIRS1304-TECH-0001 |
最終更新日:2013.5.15
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2013.5.15 | 小鍋涼太 | 初版 | |
| A02 | 2013.5.15 | 小鍋涼太 | 牛丸先生 |
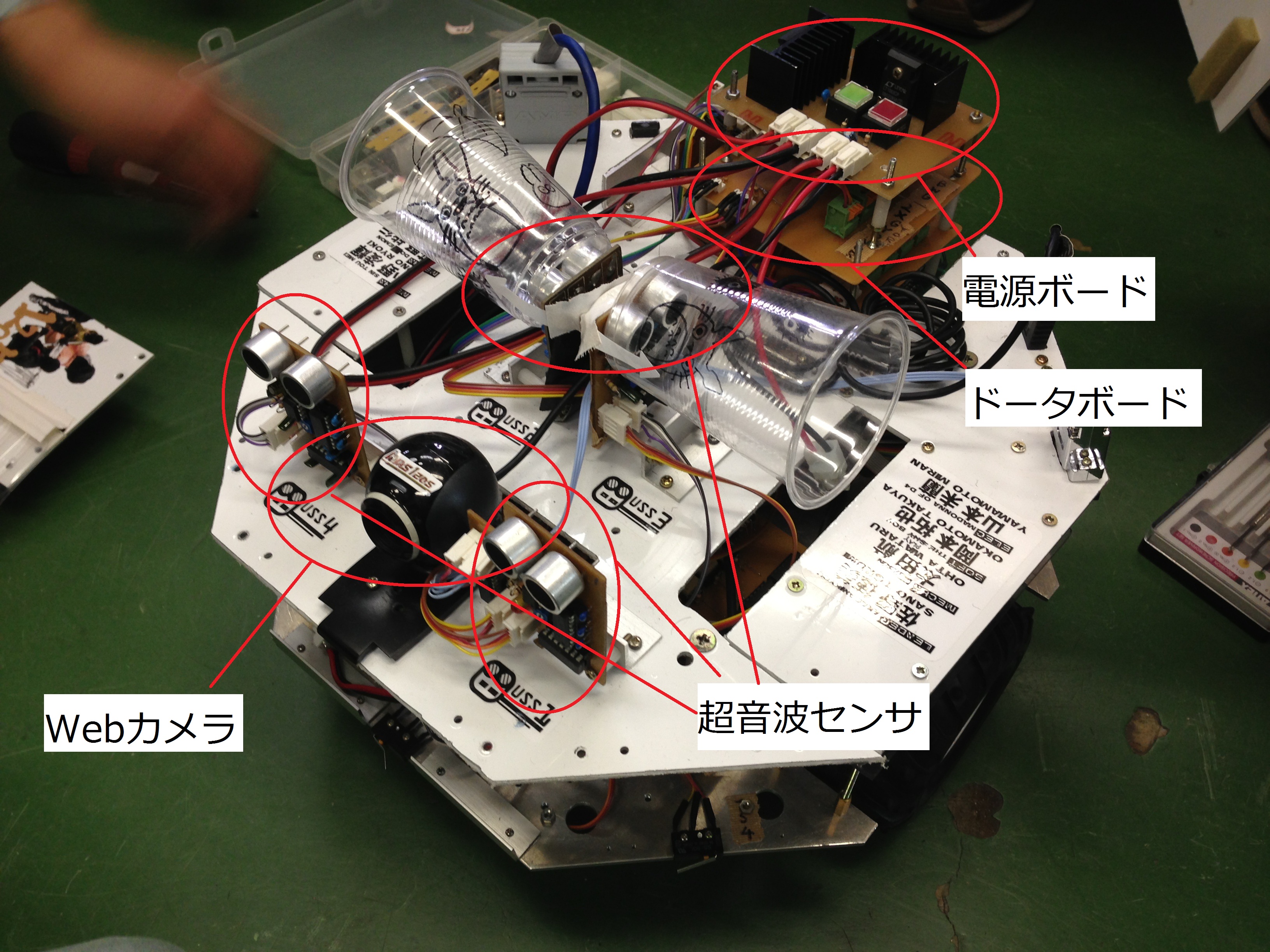
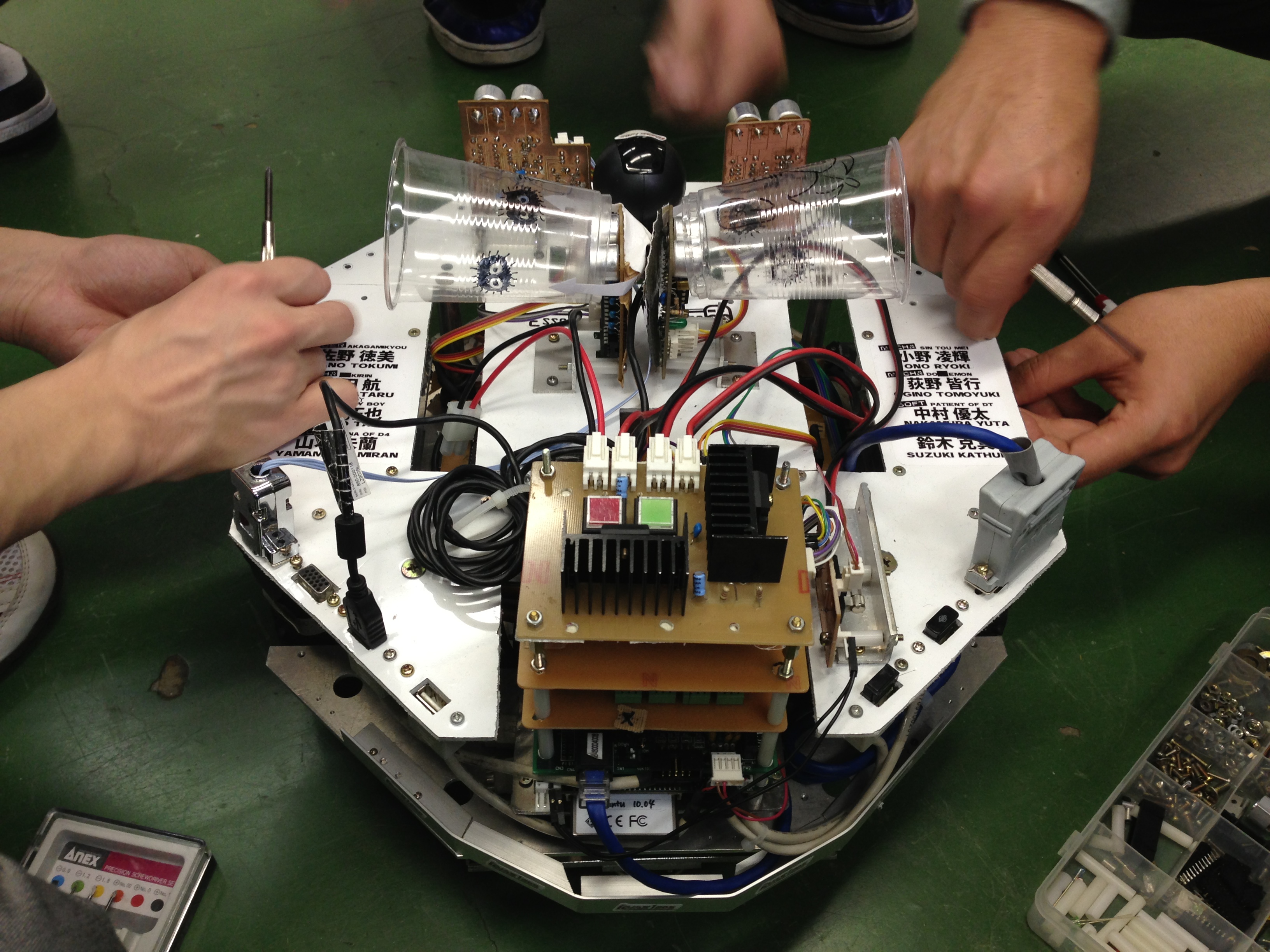
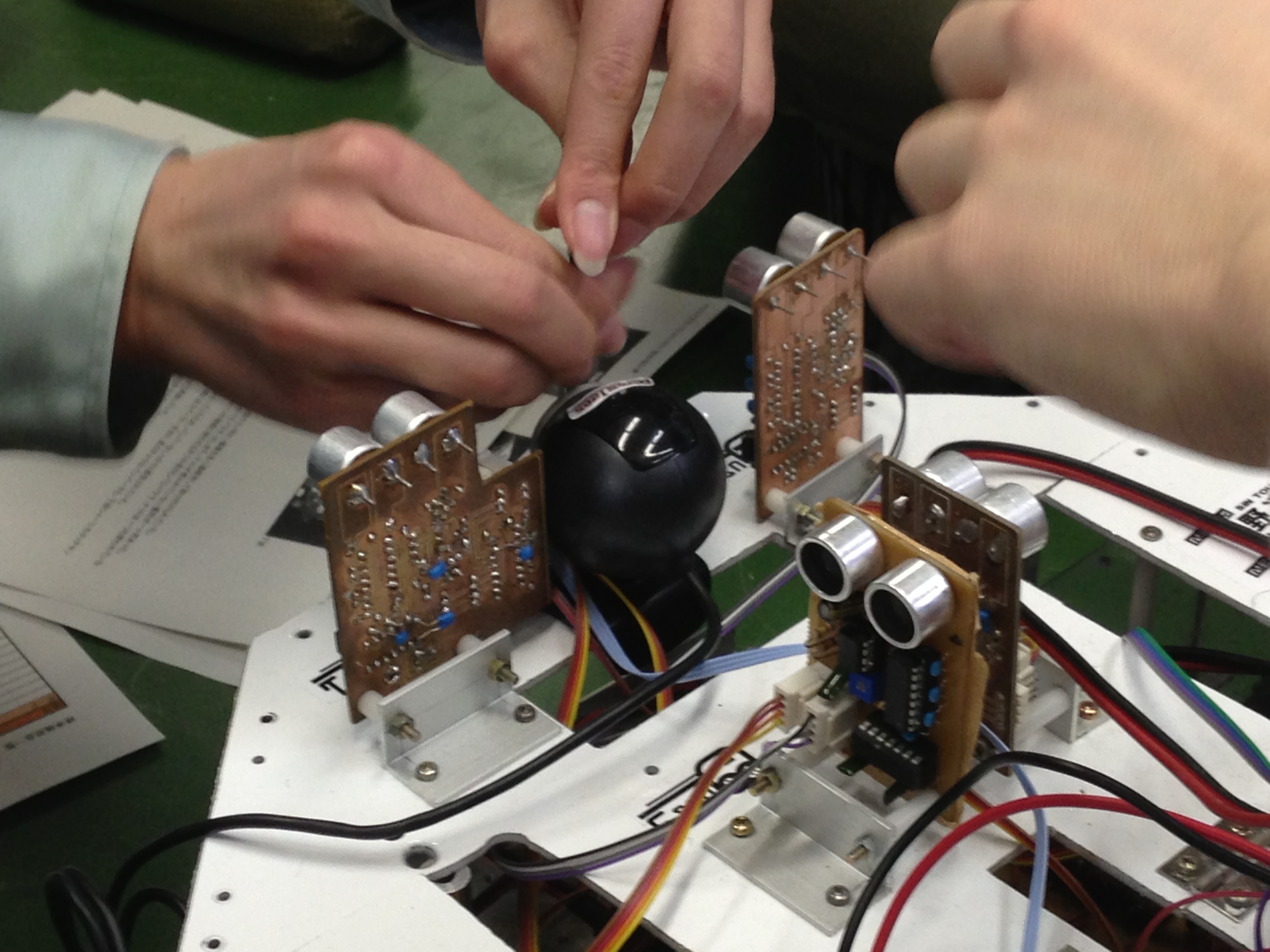
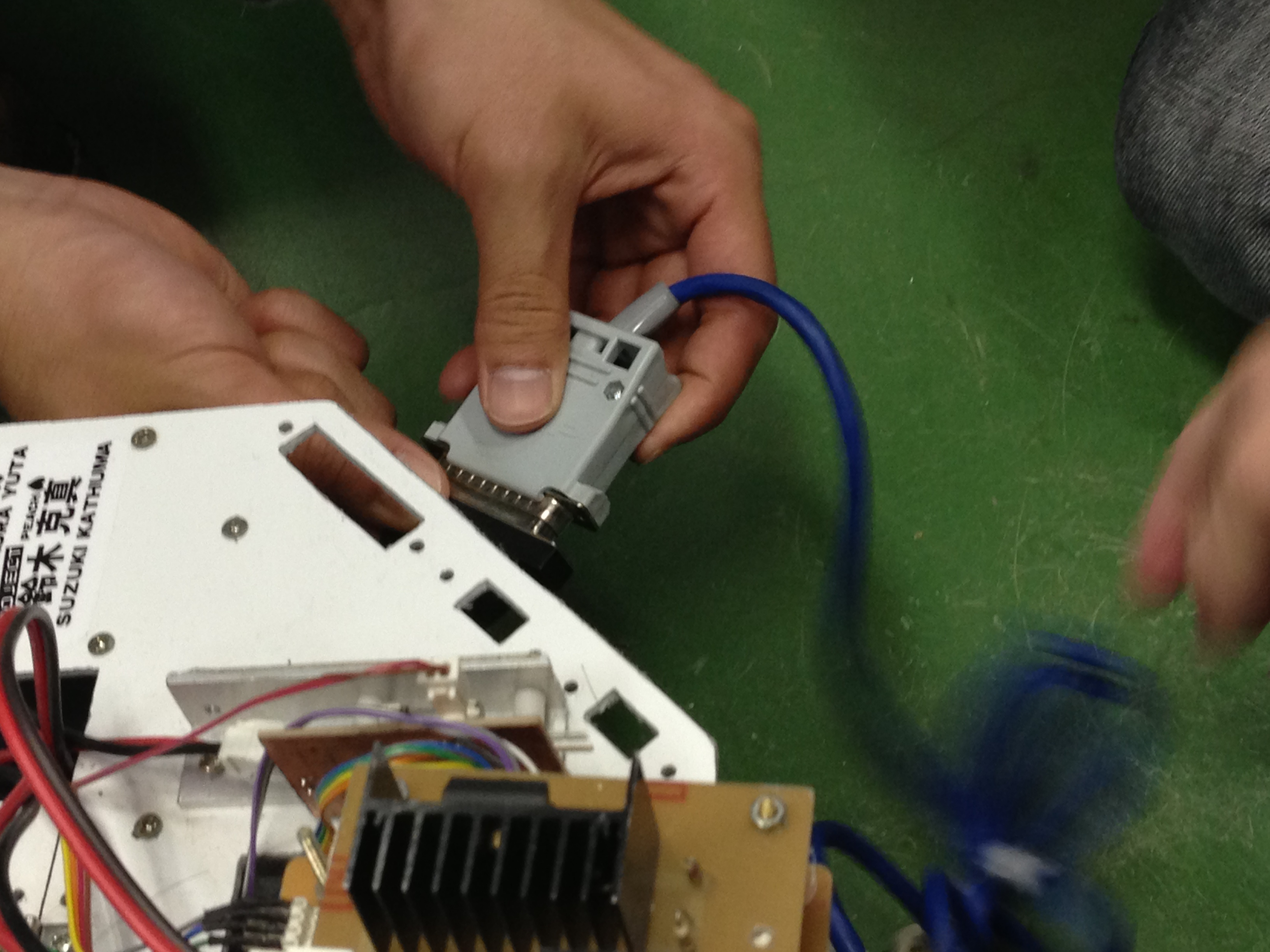
全ての画像の拡大可能化 バンパーについての修正 支柱についての修正 ヒューズ回路についての説明の加筆 下段シャーシの説明の加筆 MIRS1205自体の部品の写真の添付 リンクミスの修正 |




| 関連文書 |
|---|