はじめに
本ドキュメントは,MIRS1301の標準ボード試験結果について記したドキュメントである.
試験項目
試験を行った対象,試験項目,担当者,試験終了日を示す.
具体的な試験内容および合格基準は
MIRS1301 標準ボード試験計画書
を参照.
| 試験対象 | 試験項目 | 担当者 | 試験終了日 | 備考 |
|---|---|---|---|---|
| 電源ボード |
| 高原,鈴木 | H25/6/21(金) | 昨年度の基板を使用 |
| ドータボード(上下1枚ずつ) |
| 大森,吉田谷 | H25/6/26(水) | |
| モーター制御ボード(2枚) |
| 岩田,鈴木 | H25/7/9(火) | 片方は昨年度の基板を使用 |
| 超音波センサボード(親機1枚,子機3枚) |
| 筧,高遠 | H25/7/8(月) | 子機2枚は昨年度のものを使用 |
試験結果
電源ボード
部品配置確認
仕様と異なる部品がいくつか存在したものの,
いずれも仕様通りの部品と同等の機能を持つものと判断し合格とした.
仕様書の部品表との相違点と,合格理由の詳細を以下に示す.
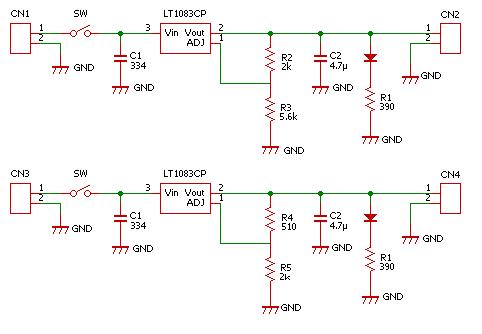
相違点 合格理由 積層セラミックコンデンサC1がフィルムコンデンサに変更されていた. 容量が変更前のものと同じ0.33μ Fであったため. 抵抗R2の抵抗値が2kΩ から1.8kΩ に変更されていた. 三端子レギュレータのデータシート(PDF)から出力電圧を計算したところ
理論値が約5.45Vで,動作試験の合格基準を満たしていたため.
スイッチレンズが,透明なものに変更されていた. 回路上の変更点が無く,また変更前と比べてLEDの点灯が分りやすかったため. 2ピンコネクタがDCジャックに変更されていた. 接触不良対策としての変更であることが明らかなため.
また,十分な数のケーブルを前年度の班から引き継いでおり使用上問題無いため.導通試験
はんだ付けに問題は無く,GNDが浮いている箇所も無かった.
なおCN2,4のVcc端子とGND端子の間の抵抗値は390Ω であり絶縁の判定基準10kΩ 以上を満たしていなかったが,
回路図 からこの抵抗値が正常であると分かるため合格とした.動作試験
試験結果 : 電源ボード動作試験チェックシート
制御系電源,駆動系電源ともに合格基準を満たしていた.
入力電圧低下時の動作について :
制御系電源は,入力電圧が6.0Vまで低下しても出力電圧は5.1Vを下回らなかった.
駆動系電源は,入力電圧が6.4Vまで低下した時点で出力電圧が基準の電圧6.1Vを下回った.
ドータボード
部品配置確認
対象のボードと仕様書の実装図,部品表を照らしあわせ, 部品がすべて正しく実装されていることを確認した.
しかし,ドータボード回路図と実装図を比較した際,
GNDが正しく接続されていないことが判明したため, 図1のように回路を変更した.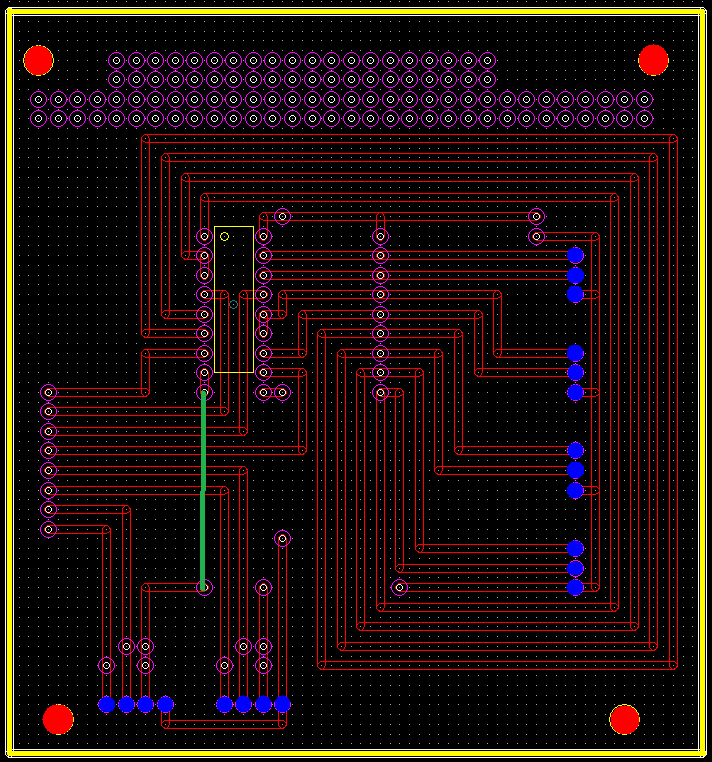
導通試験
上段・下段ドータボードともに,Vcc端子とGND端子間の絶縁が確認できた.
はんだ付けに問題は無く,GNDが浮いている箇所も無かった.
電源供給用のコネクタのGND端子と他の全てのGND端子の間の導通も確認出来たため,合格とする.
動作試験
試験結果 : ドータボード動作試験チェックシート
上段・下段ドータボードともに10回以上試行して同様の結果が得られたため,合格基準を満たしているとする.
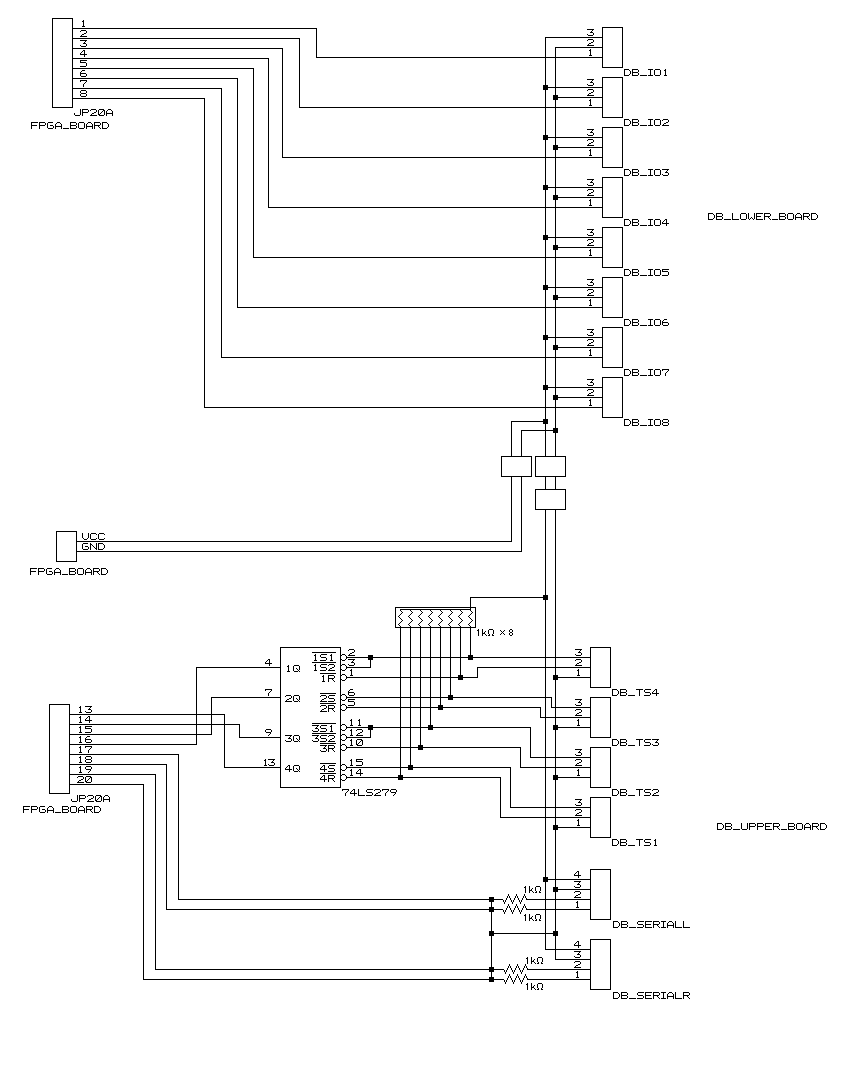
MIRSMG3D On/Off I/Oデータ取得試験プログラム を実行した際,センサ無接続時に,TS[1]〜TS[4]は1の値を返したが,I/O[1]〜I/O[8]は0と1を不規則に繰り返していた.
しかし,センサを接続した場合は安定した値をとるため,動作に影響はないものとする.
TS[1]〜TS[4]において,タッチセンサ反応時は1,無反応時は0の値を返した.
I/O[1]〜I/O[8]において,白線センサ無反応時に,FPGAボードに5.4Vの電圧がかかり,値は0を返した.
白線センサ反応時には,FPGAボードに電圧はかからず,値は1を返した.
また,MIRSMG3D FPGA Quatus設計データおよびTTFファイル のttfファイルと,以前から使用されていたttfファイルにおいて,I/O[5]〜I/O[8]のピン番号の設定が異なっていることが判明した.
旧ttfファイルと新ttfファイルのI/Oポートの対応を以下に示す
旧ttfファイルのI/Oポート 新ttfファイルのI/Oポート 5 8 6 7 7 6 8 5
モーター制御ボード
部品配置確認
前年度より引き継いだ基板をMTCB1,今年度作成した基板をMTCB2とする.
対象のボードと仕様書の実装図,部品表を照らしあわせ, MTCB2は部品がすべて正しく実装されていることを確認した.
MTCB1の2ピンコネクタがDCジャックに変更されていたが,接触不良対策としての変更であることが明らかであり,
また,十分な数のケーブルを前年度の班から引き継いでおり使用上問題無いため,合格とした.
導通試験
MTCB1,MTCB2ともに,Vcc端子とGND端子間の絶縁が確認できた.
はんだ付けに問題は無く,GNDが浮いている箇所も無かった.
電源供給用のコネクタのGND端子と他の全てのGND端子の間の導通も確認出来たため,合格とする.
動作試験
試験結果 : モータ制御ボード動作試験チェックシート
総合動作試験時に,PICが動作していないことがあった
原因は不明だが,遅くても一日体験入学までには修復させる.今までにチェックした箇所を以下に述べる.
- ドータボード試験の再試験(問題なし)
- MTCB,ドータボード間のコードの導通チェック(問題なし)
- LEDがついてないときのMTCBのVCC,GND間電圧(5V)
原因は,一時的な接触不良によるものであったと思われる.- ドータボード試験の再試験(問題なし)
超音波センサボード
部品配置確認
対象のボードと仕様書の実装図,部品表を照らしあわせ,親機,子機1,2は部品がすべて正しく実装されていることを確認した.
子機3はコネクタが1つ付いていないが,この後に接続する子機がないため,合格とする.
導通試験
子機1,2,3に関しては,はんだ付けに問題はなく,GNDが浮いている箇所もなかった.
また,Vcc端子とGND端子間の絶縁,電源供給用のコネクタのGND端子と他の全てのGND端子の間の導通が確認できた.
親機の超音波受信部のはんだがついていなかったため,はんだ付けを行った.
修正後は,Vcc端子とGND端子間の絶縁,電源供給用のコネクタのGND端子と他の全てのGND端子の間の導通が確認できた.
動作試験
試験結果 : 超音波センサボード動作試験チェックシート
チェックシートより,板との角度θ=0度である場合に,板までの距離が20cmから40cmのときは誤差5%以内,40cmから先は誤差10%以内であることが確認できたため,試験は合格とする.
また,チェックシート内のオレンジ色の部分は値が20(近すぎた場合のエラー値)および9999(遠すぎた場合のエラー値)である.
また,超音波センサの読み取る値は,超音波センサと測定対象との角度θの絶対値が90度に近づくに連れて誤差が大きくなり,値が読めなくなることも確認できた.
この結果から,超音波センサを取り付けるときには測定対象との角度を考慮したうえで取り付けなければならないことが判明した.
{kind=link}
{kind=link}