3.摦嶌帋尡寢壥
3.1 昗弨帋尡僾儘僌儔儉偵傛傞摦嶌帋尡
偙偺摦嶌帋尡偼昗弨帋尡僾儘僌儔儉偵傛傞捈恑憱峴丄夞揮憱峴丄慁夞憱峴丄悢帤擣幆偺摦嶌帋尡偱偁傞丅
丒moter_test straight丗捈恑憱峴
捈恑憱峴偼憱峴惂屼帋尡僾儘僌儔儉 偵婰嵹偝傟偰偄傞曽朄偱帋尡傪峴偭偨丅
捈恑憱峴僾儘僌儔儉傪幚峴偟偨寢壥丄1m恑傓偛偲偵嵟戝5cm嵍塃偵偵偢傟傞偑捈恑憱峴偼巜椷捠傝偵峴偊偰偄傞偙偲偑暘偐偭偨丅
嵍塃偵偢傟偰偟傑偆摦嶌偺夵慞傪偙傟偐傜峴偭偰偄偔丅
丒moter_test rotate丗夞揮憱峴
夞揮憱峴傕捈恑憱峴偲摨條偵憱峴惂屼帋尡僾儘僌儔儉 偵婰嵹偝傟偰偄傞曽朄偱帋尡傪峴偭偨丅
帪寁夞傝丄敿帪寁夞傝偺椉曽偱90搙偲180搙夞偡巜椷偱帋尡傪峴偭偨丅
幚峴寢壥偼丄妏搙巜椷傛傝傕嵟戝偱10搙丄戝偒偔夞傝偡偓偰偟傑偆栤戣偲5夞偵1夞傎偳夞揮偟懕偗偰巭傑傜側偄栤戣偺2偮偑婲偒偨丅
偙偺栤戣偼僾儘僌儔儉偺尒捈偟偱夵慞偡傞偲巚傢傟傞丅
丒moter_test circle丗慁夞憱峴
儘乕僞儕乕憱峴傕捈恑憱峴丄夞揮憱峴偲摨條偵憱峴惂屼帋尡僾儘僌儔儉 偵婰嵹偝傟偰偄傞曽朄偱帋尡傪峴偭偨丅
儘乕僞儕乕憱峴偼帪寁夞傝丄斀帪寁夞傝偱儘乕僞儕乕偺廃傝傪憱傜偣傞僾儘僌儔儉偲側偭偰偄傞丅
幚峴寢壥偼丄儘乕僞儕乕偺廃傝偼憱傞偑妏搙巜椷偑偱偒偢偵巭傑傜側偄寢壥偵側偭偰偟傑偭偨丅
尨場傪撍偒巭傔丄妏搙巜椷偑偟偭偐傝偱偒傞傛偆偵偟偰偄偔偙偲傪崱屻偺曽恓偲偡傞丅
丒number_test丗 悢帤擣幆
悢帤擣幆偼悢帤擣幆帋尡僾儘僌儔儉偵婰嵹偝傟偰偄傞曽朄偱帋尡傪峴偭偨丅
悢帤擣幆偺僒儞僾儖僾儘僌儔儉傪幚峴偟偨偲偙傠丄DB偺嵍塃椉曽偺悢帤傪堦偮偢偮擣幆偡傞偙偲偼偱偒偰偄偨丅
弌椡寢壥偼撉傒崬傫偩夞悢偑懡偄曽偺悢帤偩偗傪寢壥偲偟偰弌椡偝傟偰偄偨丅
弌椡寢壥偵DB偺嵍塃偳偪傜偐偺悢帤堦偮偟偐弌椡偝傟側偄偨傔丄撉傒庢偭偨嵍塃椉曽偺悢帤傪弌椡偡傞偙偲偑偱偒傞傛偆偵僾儘僌儔儉傪夵椙偡傞昁梫偑偁傞丅
傑偨丄DB偺嵍塃偺悢帤椉曽傪撉傒庢偭偰偄傞偵傕娭傢傜偢弌椡僄儔乕偑弌傞偙偲偑偁傞偺偱偙傟傕夵慞偡傞昁梫偑偁傞丅
3.2 僨儌僾儘僌儔儉摦嶌帋尡
偙偺僨儌僾儘僌儔儉偼丄懱尡擖妛偺僨儌偺嵺偵巇妡偗傪僋儕傾偡傞偨傔偺僾儘僌儔儉偱偁傞丅埲壓偵帵偡偺偼奺巇妡偗偵懳偡傞僨儌僾儘僌儔儉偺摦嶌帋尡偱偁傞丅
丒儘乕僞儕乕
mg3.h撪偺#difine MIRS_RADIUS偺抣傪165偐傜175偵曄峏丅
make偟偰motor_test傪幚峴丅rotary傪慖戰丅
偦傟偧傟偺抣傪
angle 丗360[deg]
time 丗10000[msec]
circle_radius 丗170[mm]
clock_wise 丗0乮帪寁夞傝乯
偵愝掕偟偰幚峴偟偨寢壥丄儘乕僞儕乕偺憱峴偵惉岟偟偨丅
弌岥専弌偟偰儘乕僞儕乕傪敳偗傞偙偲偼偱偒側偐偭偨丅
儘乕僞儕乕憱峴傪巭傔傜傟側偐偭偨偺偑尨場偱偁傞偨傔丄僾儘僌儔儉偺夝愅傪恑傔偨偄偲巚偆丅
彫偝側妏搙偱偼巜掕偟偨妏搙偱掆巭偡傞偙偲偑偱偒傞偺偱丄儘乕僞儕乕僄儞僐乕僟乕偺抣偺庢摼偐傜寁嶼偺晹暘偵偐偗偰丄壗傜偐偺晄嬶崌偑偁傝柍尷儖乕僾偵娮偭偰偟傑偭偰偄傞偲悇應偟偰偄傞丅
丒T帤楬
mg3_std_program偺test僼僅儖僟偺拞偺motor_test.c偺拞恎偵僾儘僌儔儉傪捛壛偟偰摦嶌傪峴偆傛偆偵偟偨丅
忦審暘婒偺僾儘僌儔儉偺嶌惉傪崲擄偲敾抐偟偨偨傔丄僔乕働儞僗惂屼偱T帤楬丄尞丄斷偺峌棯傪峴偭偨丅
僔乕働儞僗偺撪梕偼恾偱帵偡丅
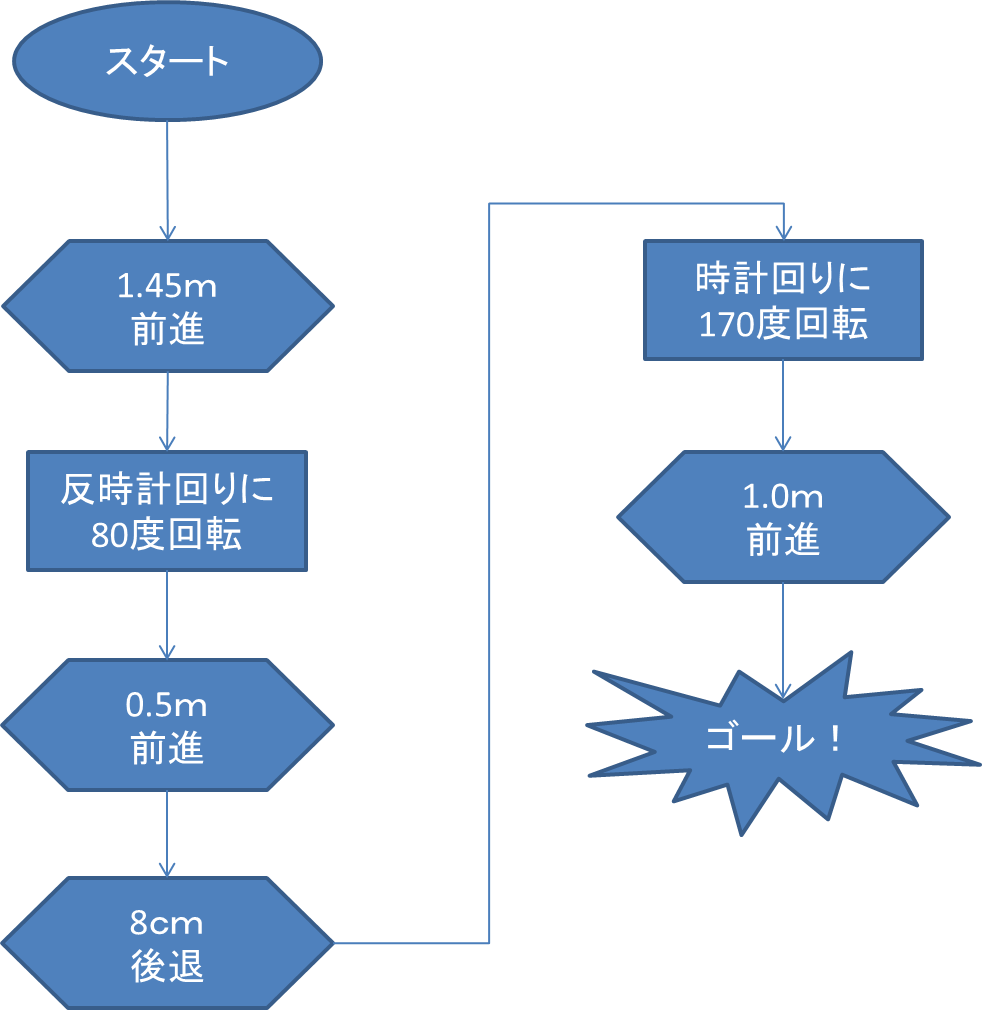 僔乕働儞僗惂屼偺僼儘乕僠儍乕僩
僔乕働儞僗惂屼偺僼儘乕僠儍乕僩寢壥偲偟偰峌棯傪偡傞偙偲偼偱偒側偐偭偨丅偟偐偟丄庤偱曗彆偡傞偙偲偵傛偭偰T帤楬傪敳偗弌偡偙偲偑偱偒偨丅幐攕偺尨場偼僔乕働儞僗惂屼偺挷惍儈僗偩偭偨丅
崱屻偺壽戣傪偟偰丄敀慄僙儞僒丄夋憸擣幆丄挻壒攇側偳偺僙儞僒乕椶傪慻傒崬傫偩忦審暘婒偺僾儘僌儔儉傪嶌惉偟偰偄偒偨偄偲巚偆丅
丒悢帤擣幆
崱夞偺悢帤擣幆偼MIRSMG3D 悢帤擣幆僾儘僌儔儉乮俀悢帤斉乯偵偁傞num_detect2.c傪巊梡偟偨丅
mg3_std_program偺threshold_value.h偺抣傪彂偒姺偊幚尡傪峴偭偨丅乽2乿偲乽8乿偼擣幆偱偒偨偑乽4乿偲乽7乿偼擣幆棪偑掅偔側偭偰偟傑偭偨丅
乽4乿偲乽7乿傪擣幆偟偵偔偄棟桼偲偟偰偼丄廃曈暘晍朄偺僾儘僌儔儉偺偣偄偩偲巚傢傟傞丅乽4乿偲乽7乿偼廃曈暘晍偱偼摨偠暘晍偲側偭偰偟傑偆偺偱暿偵擣幆偡傞
傾儖僑儕僘儉傪巊梡偟偰偄傞丅偙偺僾儘僌儔儉偺尒捈偟傪偙傟偐傜恑傔偰偄偒偨偄丅
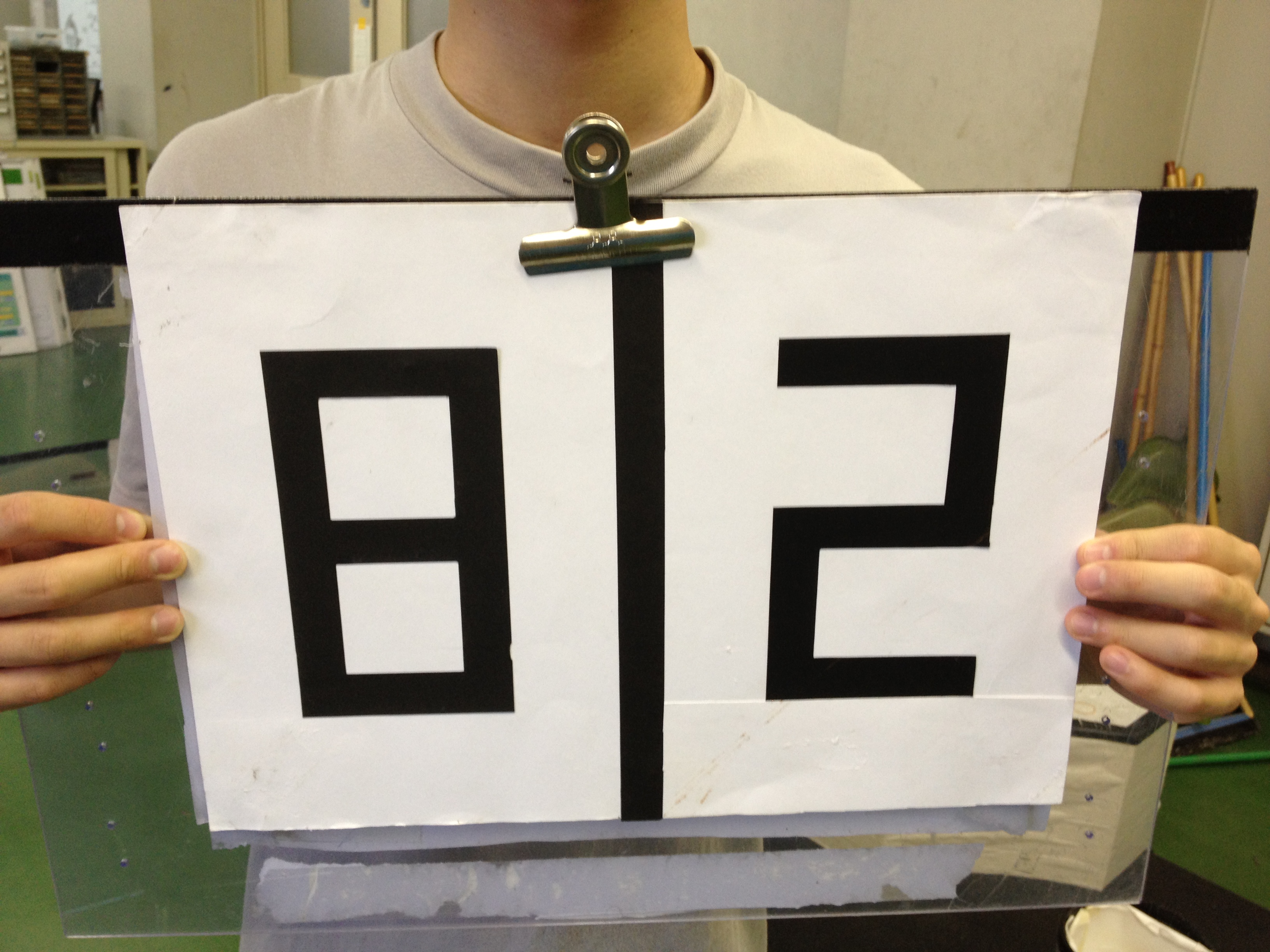 8偲2偺僟僀儗僋僔儑儞儃乕僪
8偲2偺僟僀儗僋僔儑儞儃乕僪
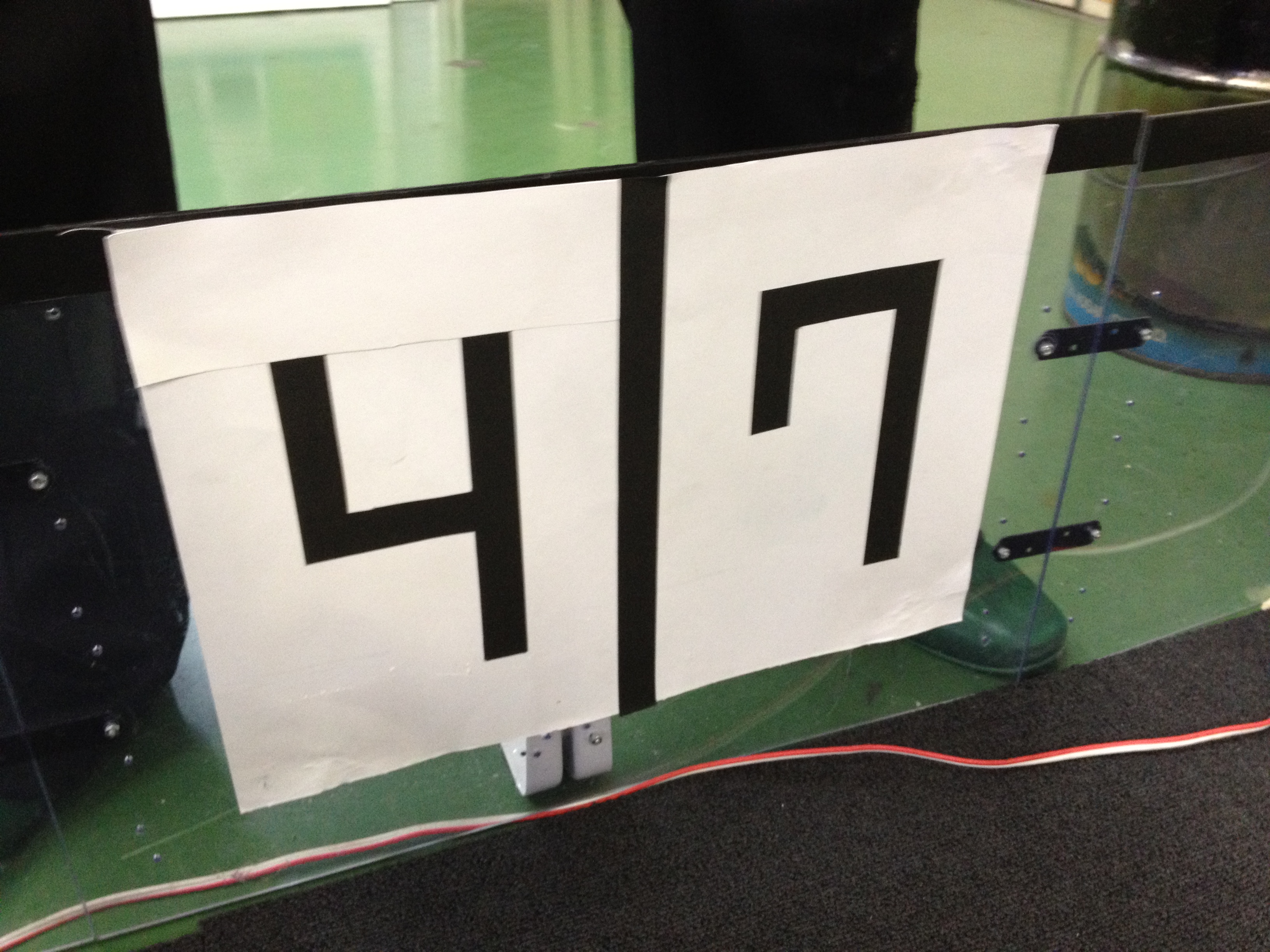 4偲7偺僟僀儗僋僔儑儞儃乕僪
4偲7偺僟僀儗僋僔儑儞儃乕僪