|
沼津高専 電子制御工学科 |
||||||
|
||||||
|
改訂記録 |
||||||
|
版数 |
作成日 |
作成者 |
承認 |
改訂内容 |
||
|
A01 |
2004.7.20 |
相磯雄飛 |
鈴木寛里 |
初版 |
||
|
A02 |
2004.7.21 |
上園隆文 |
上園隆文 |
ドキュメント番号の変更 |
||
|
A03 |
2004.7.22 |
相磯雄飛 |
上園隆文 |
誤字訂正、ソフト関連訂正 |
||
|
|
|
|
|
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
||
目次
1、はじめに
2、システム概要
3、機能・性能
4、実現方法
最近のロボットの進歩(progress)は目覚しく、MIRS(Micro Intelligent Robot System)もその繁栄を受け、1995年に始まったMIRS競技会も2002年には競技場を覆っていた壁も取り払われ、今、僕たちが高専D科の先頭にたち、新たなる歴史を作ろうとしている…。今までの輝かしい高専の歴史を作ってきた先輩方に恥じないような活躍が僕たちに期待されている。
本仕様書はMIRS競技規定に基づき、MIRSの基本仕様を記述する。
1、
システム要求
MIRSがポストのない直線を確認しある場所で止まり、そこから超音波センサにより感知できるポストの座標を取る。もしそれで全てのポストの座標を取れなかったら、もう一度ポストのない直線を確認した後に移動し、一回目と同じように超音波センサによりポストの座標を取る。この時、最終的にMIRSがいる位置をAとする。その後近いポストの番号を調べにいく。またそのポストからもっとも近いポストへと移動してすべてのポストを回ってからAに戻ってくる。
このとき1とそれと連続する番号があった場合はそのポストを獲得する。
例 3→4→2→1だった場合は1だけ獲得
1→3→2→4だった場合は1と2を獲得
その後とってない番号を回りすべてのポストを獲得する。
競技2回目は1回目にとっておいた座標を使いAに移動してからポストを順番に獲得する。
詳しい動作説明をシステム提案書に示す。
2、
ハードウェア
MIRS0403システムのハードウェアは標準MIRSに準ずる構成を有するが、MIRS0403固有の機能を実現するためにいくつかの変更点がある。以下、標準MIRSと異なる点のみ述べる。
<赤外線センサ>
赤外線センサは、ポストのボタンから発信されている赤外線を感知するために使用する。
MIRSの前方のものは、ポストのボタンを押してポストを獲得できたかどうかを確認するためのもので、 MIRSの左側(このMIRSは時計回りにポストを回るので)のセンサは、ポストのボタンの位置を探すときに使用する。
<超音波センサ>
超音波センサはMIRSからポストまでの距離を測る。
超音波センサはMIRS機体の上、標準ではテンキーがある位置にプロペラのようにして2つのセンサをとりつけ、モーターにより独立させて回転させる。
ポスト探索時はこのセンサを回転させることによりMIRSの回転運動無しでポストを探索する。
前方についている2つの超音波センサでポストにMIRSが垂直になるようにする。
左側についている超音波センサ(プロペラに装着)で周回しているポストとの距離を保つ。
右側についている超音波センサ(プロペラに装着)で周回しているときにほかのポストを探る。
<白線センサ>
白線センサはMIRSが白線の外に出そうになったときにMIRSの制御を行う。
MIRS0403では白線センサは四方に搭載する。
<タッチセンサ>
タッチセンサはポストのボタンを押したかどうかを判別する。
MIRS0403ではタッチセンサは前方にひとつだけ搭載する。
3、
ソフトウェア
MIRS0403システムのハードウェアは標準MIRSに準ずる構成を有するが、MIRS0403固有の機能を実現するためにいくつかの変更点がある。以下、標準MIRSと異なる点のみ述べる。
・ MIRS上部のプロペラを回転させ、それについている超音波センサでポストの探索をするための制御プログラムを作成する。
・ ポスト獲得の際の移動方法を変更する。
・ 白線を確認した場合の回避動作を加える。
・ ポスト獲得数を4〜5個に対応できるように変更する。
・ 超音波センサでポストの位置を測る際、全てのポストを把握できない場合は別の位置に移動し、もう一度ポストを探す。
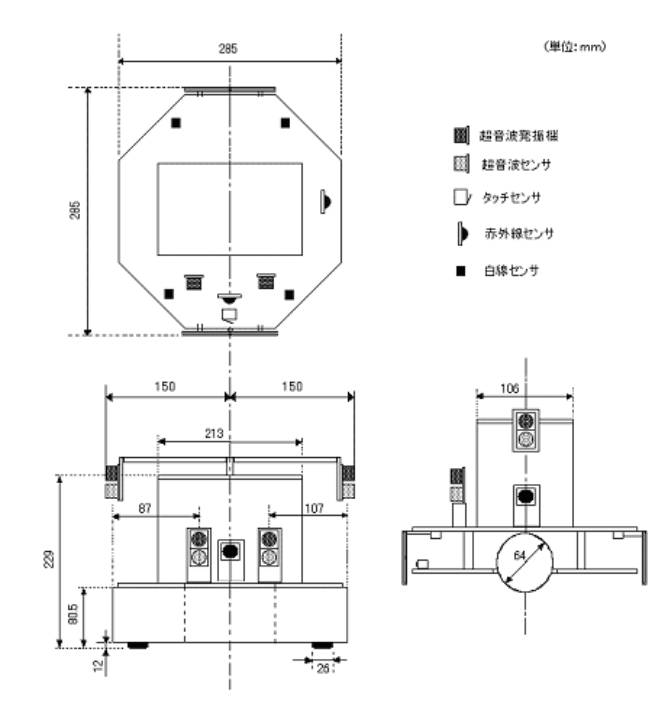
4、外観
1、
ハードウェア
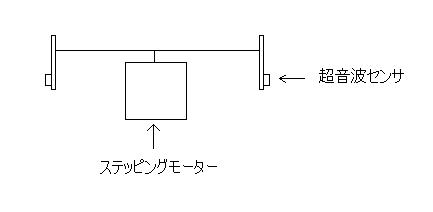
MIRS上部に独立して回転するプロペラを設置し
それに超音波センサを乗せる。
![]()
ステッピングモーター
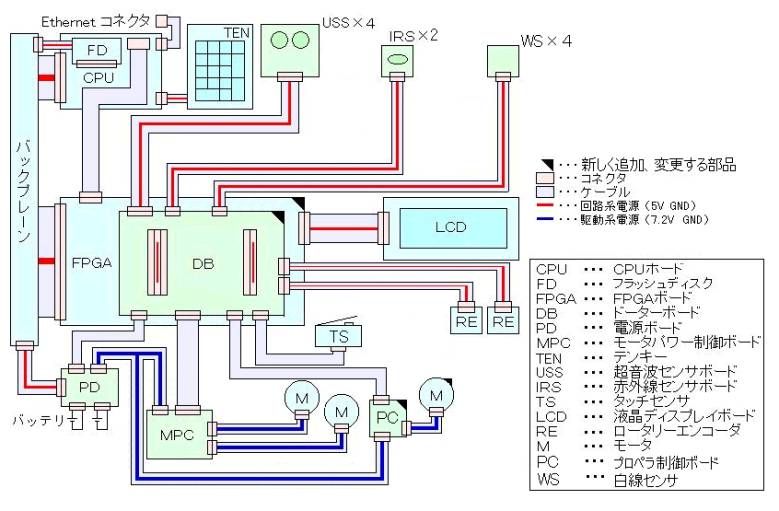
PC(プロペラ制御ボード)には自作する。詳しくはプロペラ制御ボード技術調査報告書参照。
l ドータボードとFPGAボード
プロペラを制御するために変更を加える。
l ステッピングモーターを追加
l プロペラを制御するボードを追加(プロペラ制御ボード設計書参考)
制御信号をドータボードから出力
電源は足回りを駆動する電源と同じものを使う。
l
タッチセンサと赤外線センサを減らす。
その他は標準機と同じ
ステッピングモーターの仕様
|
ステップ角 deg./step |
電圧 V |
電流 A/φ |
抵抗 Ω/φ |
インダクタンス mH/φ |
最大静止トルク mN・m (kgf・cm) |
ディテントトルク mNm (gf・cm) |
ロータイナーシャ g・cm2 |
機種名 |
|
1.8 |
6.71 |
1.0 |
6.71 |
9.36 |
834 (8.5) |
37 (380) |
188 |
KH56KM2-903 |
|
絶縁階級 |
E種相当 |
|
絶縁抵抗 |
500V DC 100MΩ min |
|
絶縁耐力 |
500V AC 50Hz 1min |
|
使用温度範囲 ℃ |
0〜+50 |
|
温度上昇 K |
70 |
1、
ハードウェア
ポストの高さにより制限されるため超音波センサの設置位置は標準MIRSの最上部より7.5cm以内に設置する。
横もMIRS競技規定より30cm以内にする。
2、
ソフトウェア
・ MIRS上部のプロペラを回転させ、それについている超音波センサでポストの探索をするため、別途購入するステッピングモーターの値と超音波センサの値を読み取るプログラムを作成する。
・ MIRSの移動方法を変更する。
競技開始直後、前方にポストがある可能性を考慮して、超音波センサによってポストの有無の確認を行う。ポストがあった場合はポストのない直線を探し、移動して各ポストの位置を把握する動作に入る。
・ 白線を確認した場合の回避動作を加える。
白線を感知した場合、Aに戻る。
・4〜5個のポストを獲得できるようにする。
・標準機のポストの座標の取り方に少し加える。
最初に超音波センサでポストの位置を検索した際、全てのポストの座標を取れない場合はもう一度移動し、ポストの位置を検索する