figure2-1:𝔊𝔘𝔏𝔏ℭ
| 名称 | MIRS2405 開発完了報告書 |
|---|---|
| 番号 | MIRS2405-REPT-0002 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2025.02.13 | 宇佐見祥, 清拓実, 幸航輝 | 香川先生 | 初版 |
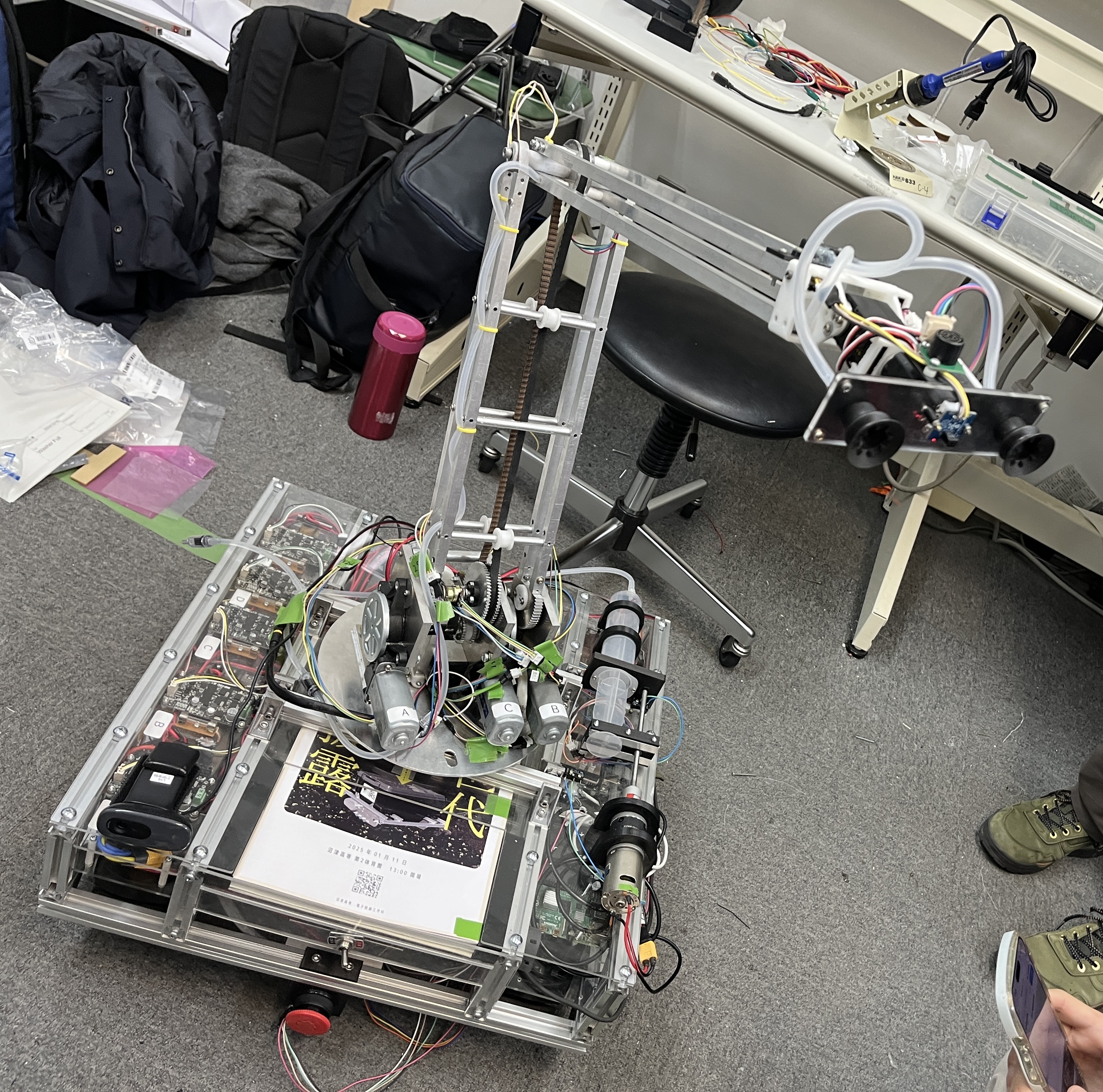
まず、制作した機体をfigure2-1に示す。
発表会における結果は以下のとおりである。
発表会(得票) 第2位
発表会では、仲谷が発表を担当した。
ステージ上で機体が動かなかったのは悲しかったが、ブースではいつも通りの動きを見せることができた。
発表自体も、あまり緊張せずに話すことができた。フィードバックに発表が良かったとも書いてあったし、個人的には満足だった。
社会実装報告書を以下のURLに示す
基本設計時点での開発スケジュールをfigure5-1に,実際の開発スケジュールをfigure5-2に示す。
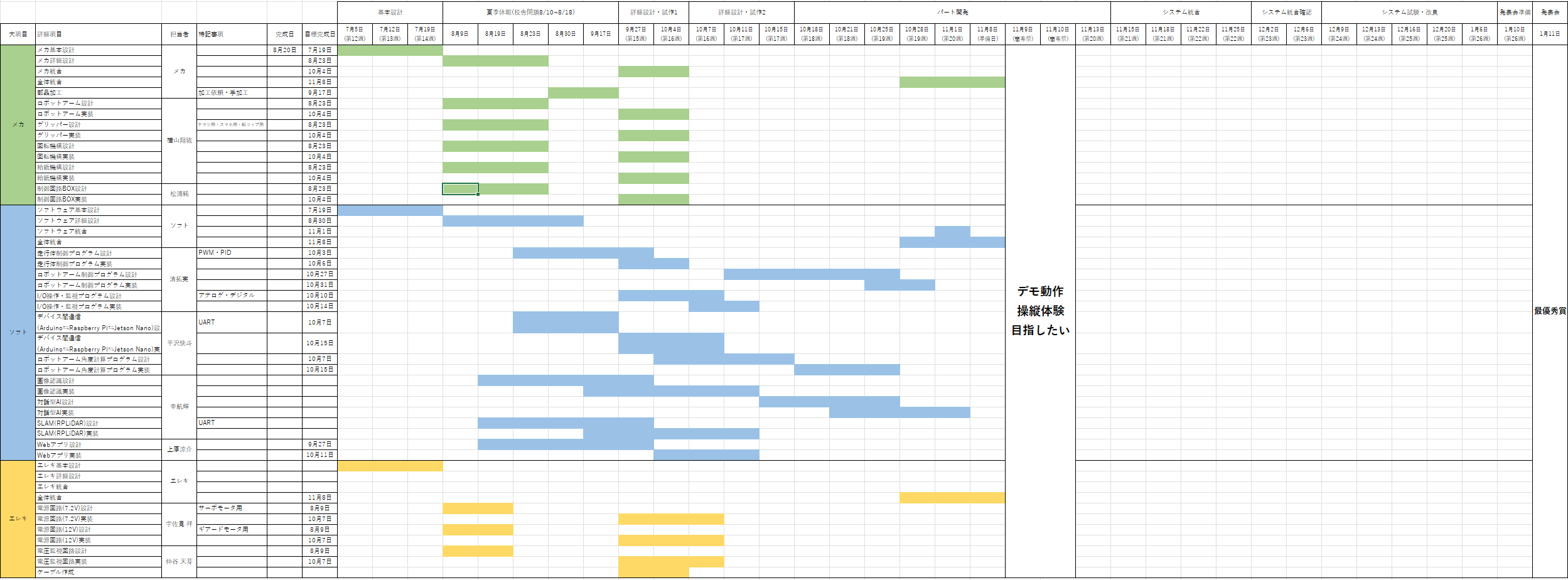
figure5-1.基本設計時点の開発スケジュール
figure5-2.実際の開発スケジュール
各班員の作業時間の割合を以下に示す。
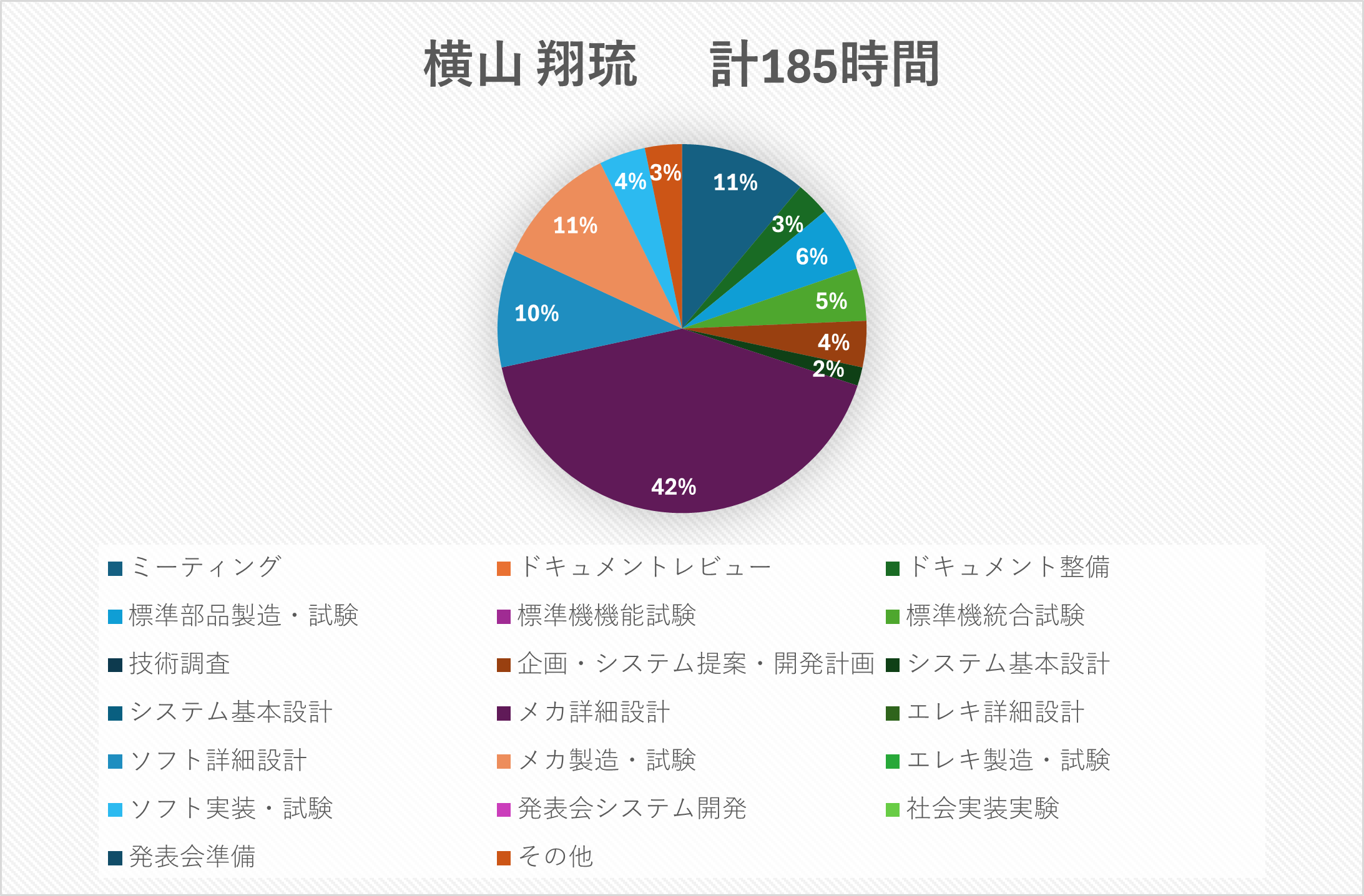
figure5-3.作業時間割合(横山)
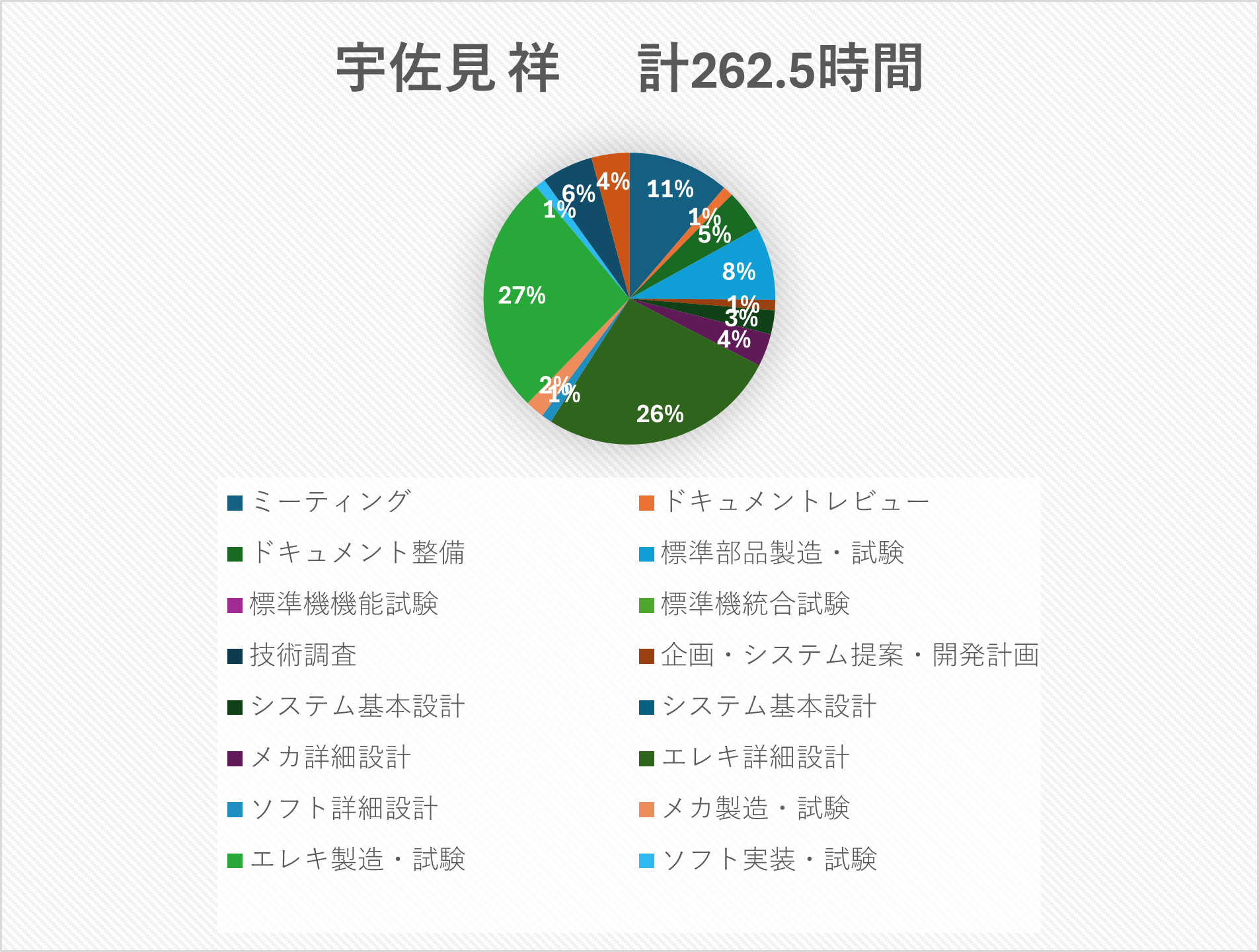
figure5-4.作業時間割合(宇佐見)
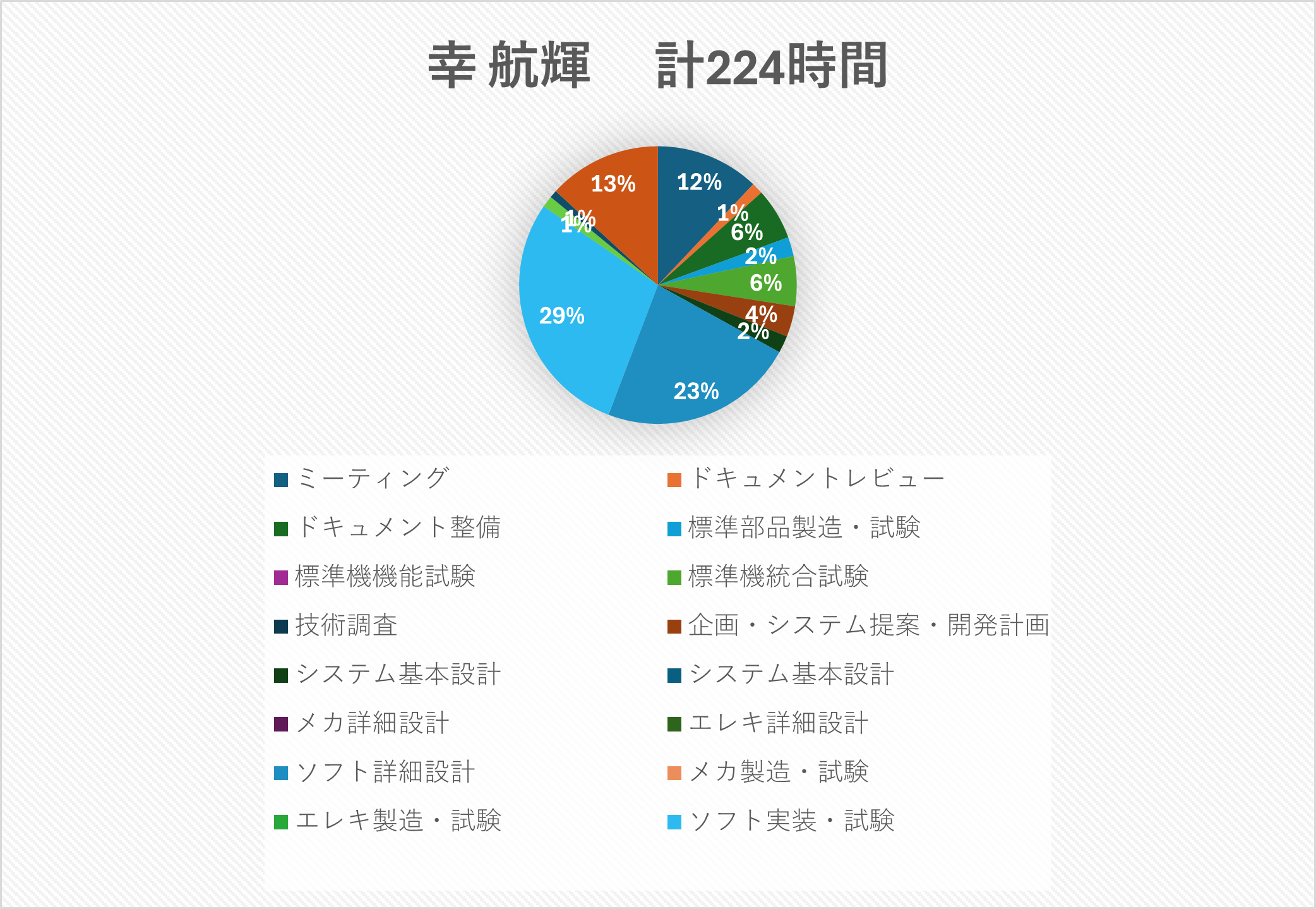
figure5-5.作業時間割合(幸)
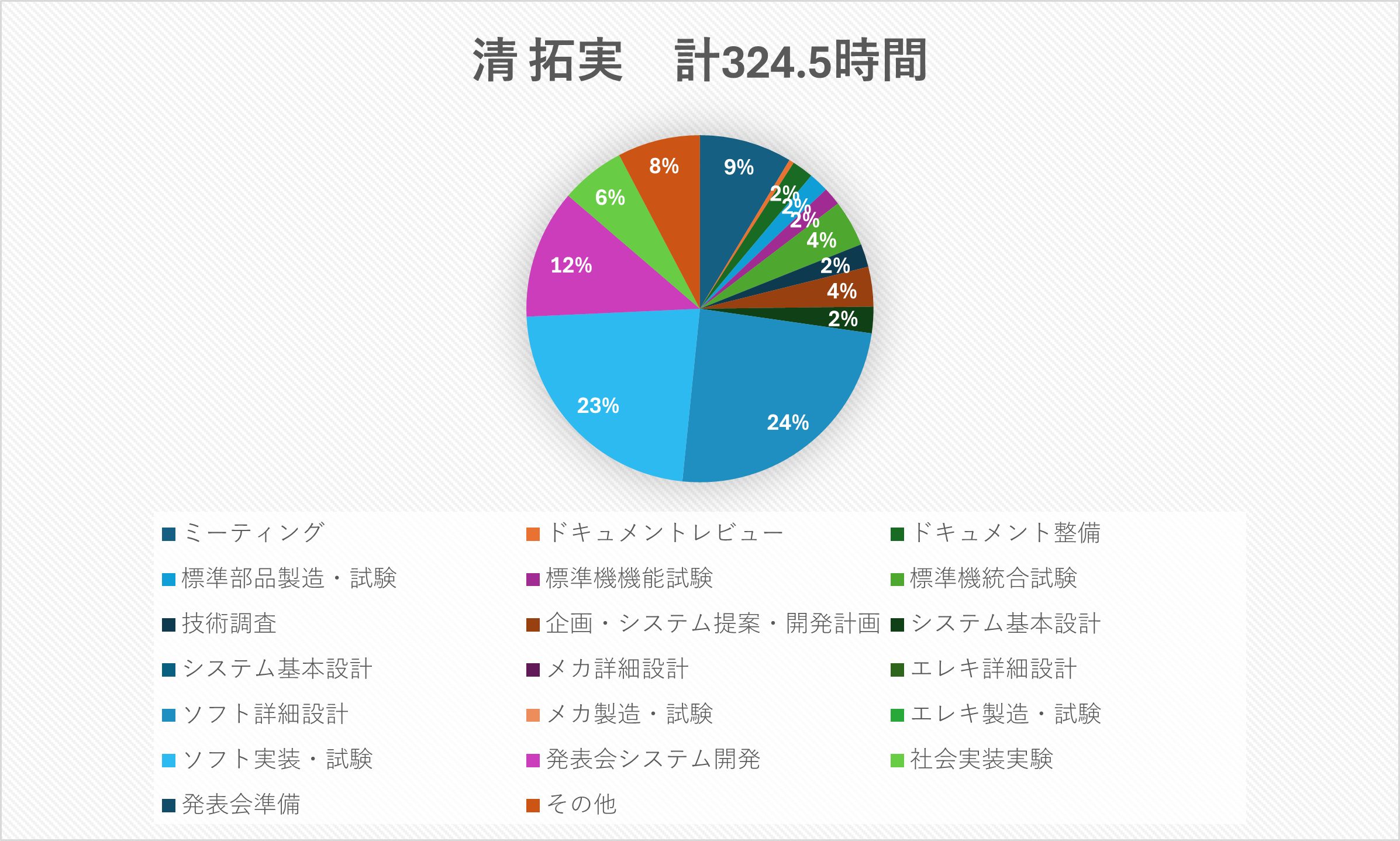
figure5-6.作業時間割合(清)
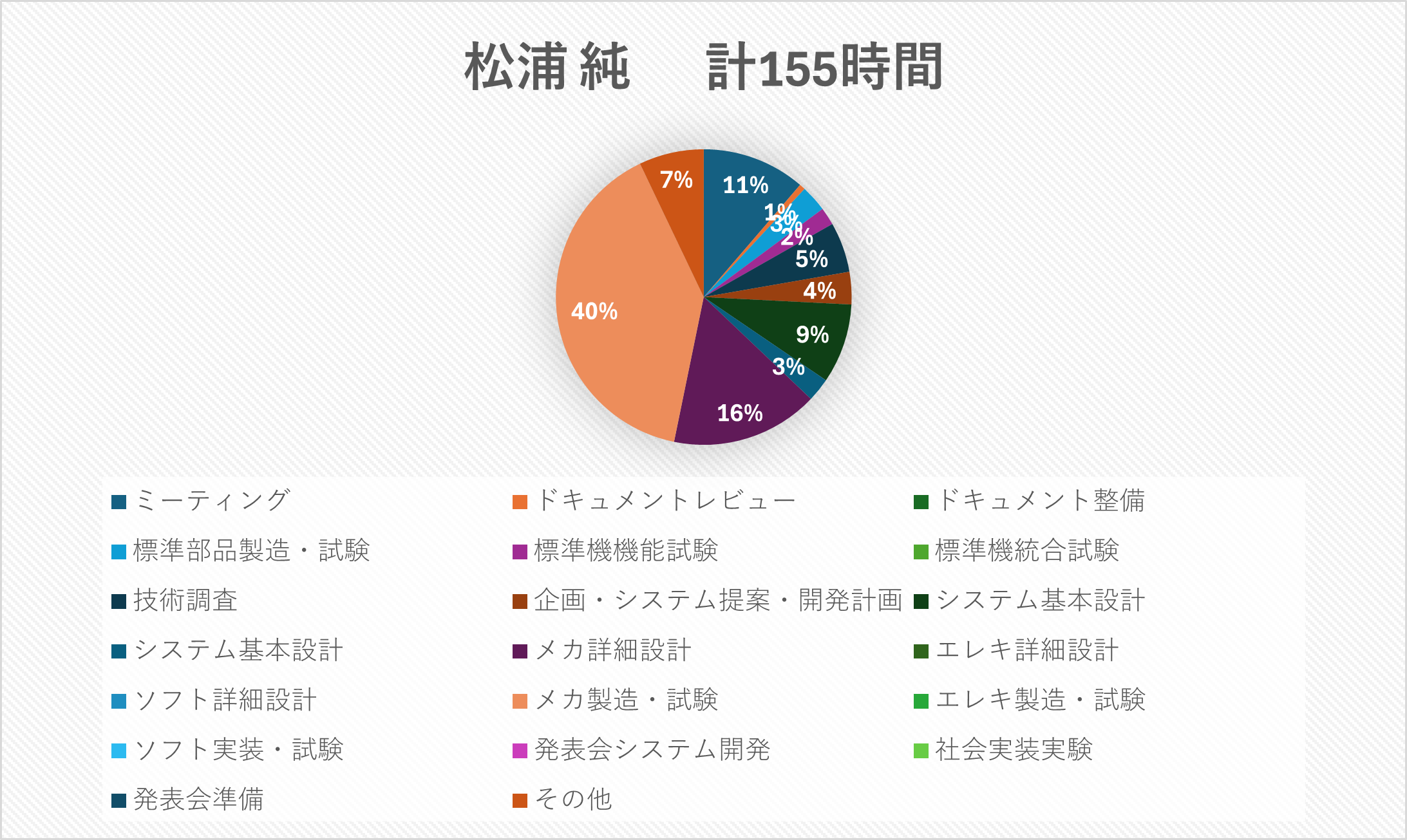
figure5-7.作業時間割合(松浦)
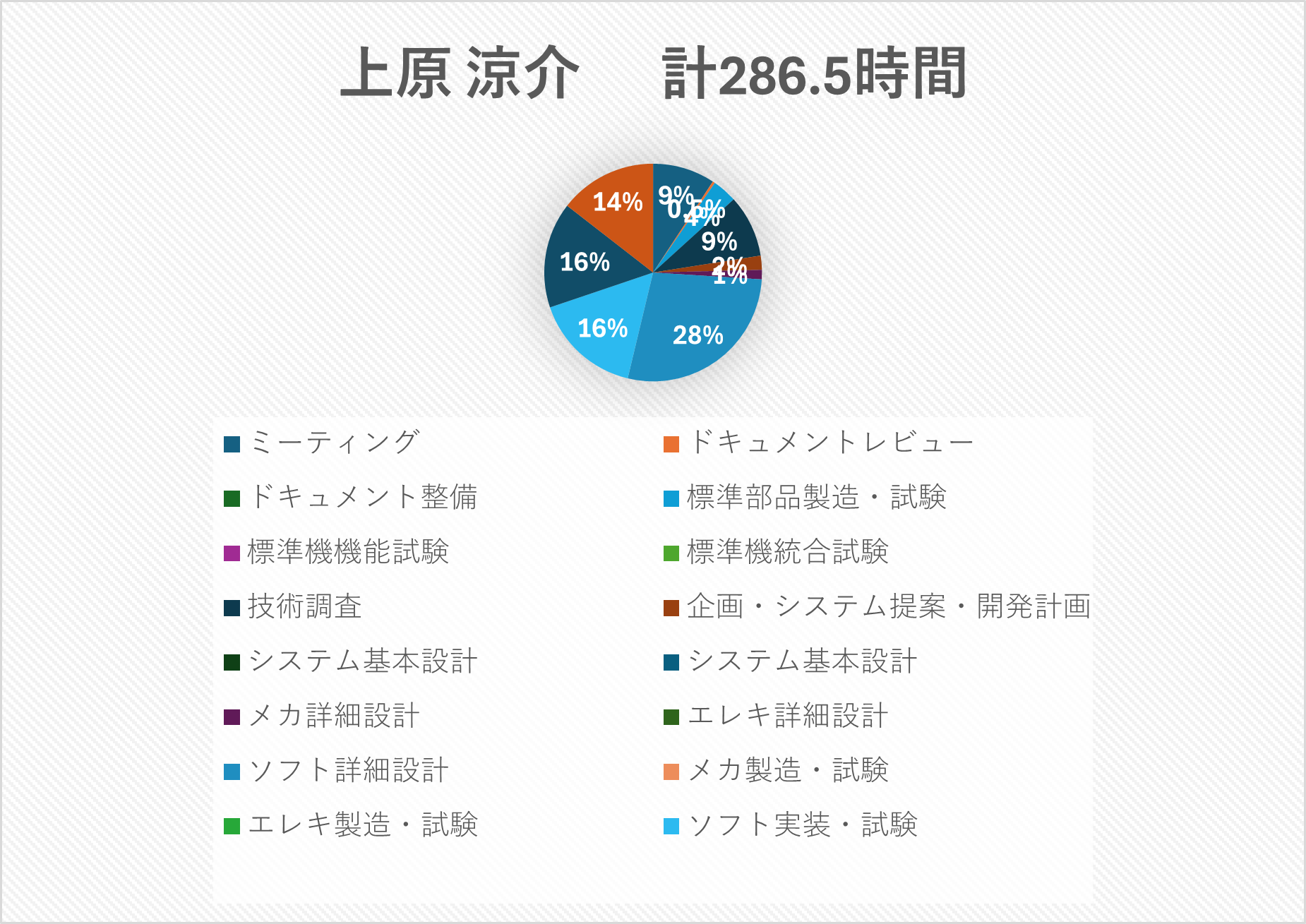
figure5-8.作業時間割合(上原)
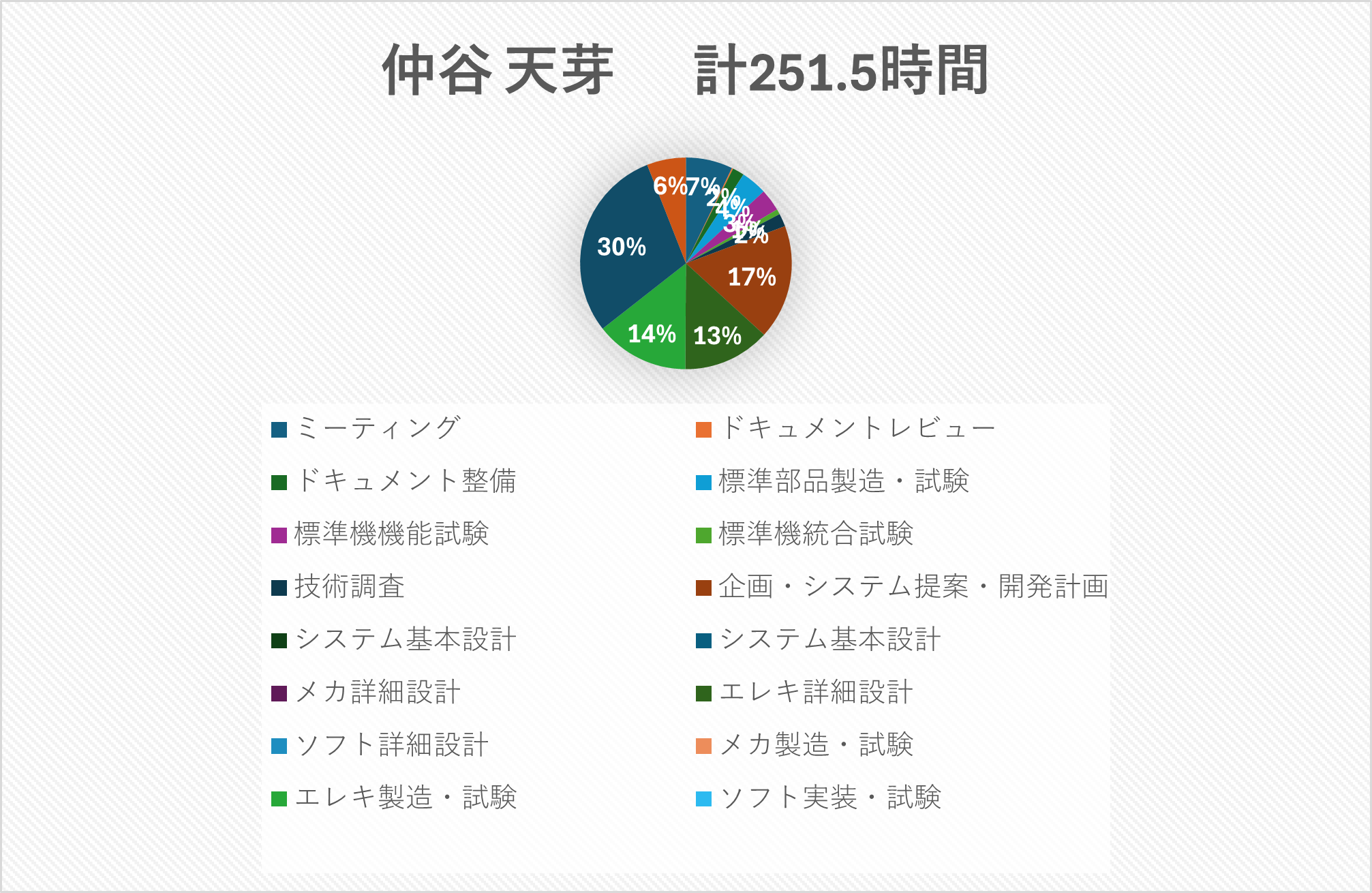
figure5-9.作業時間割合(仲谷)
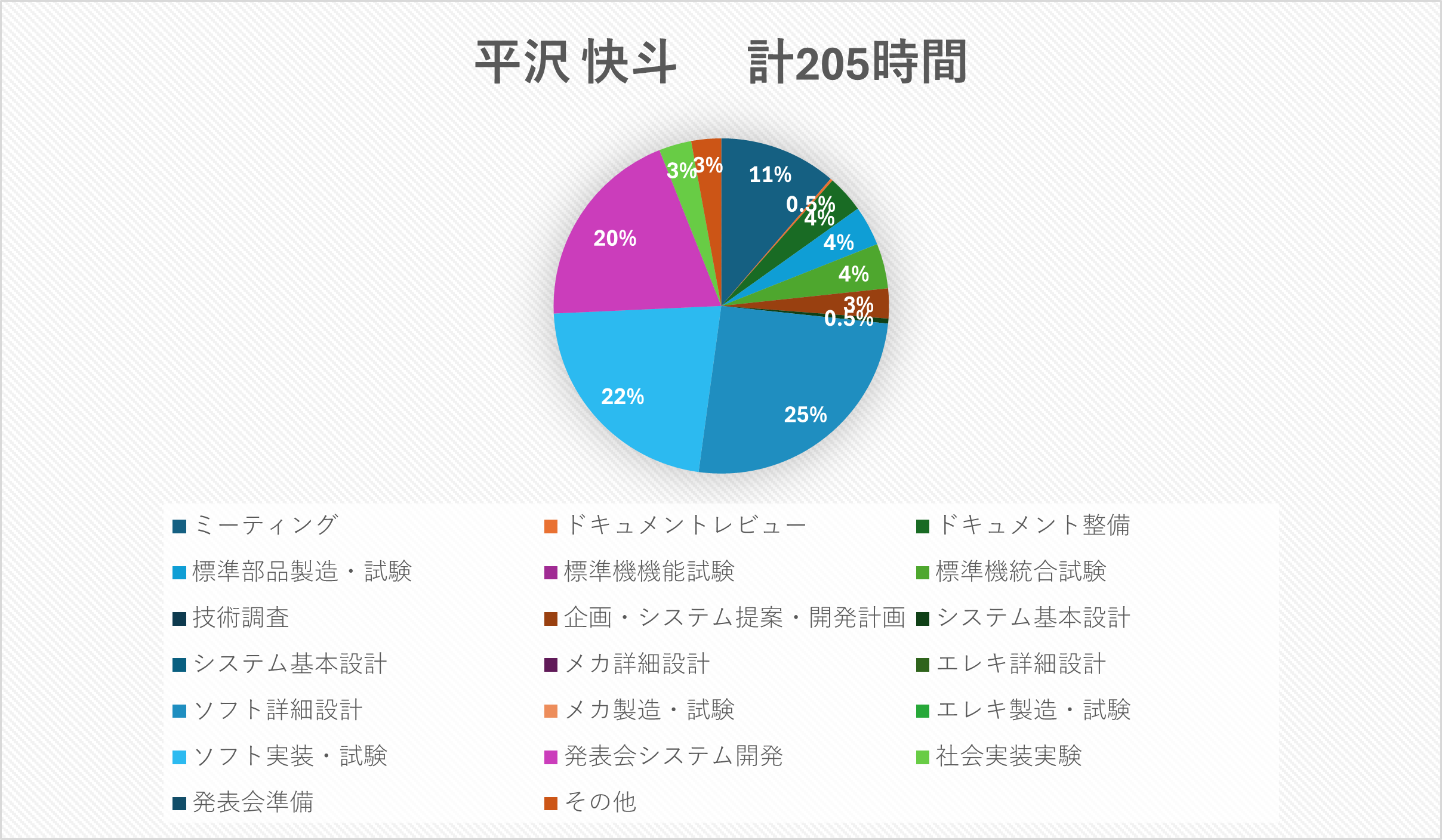
figure5-10.作業時間割合(平沢)
各パートの作業時間の割合を以下に示す。
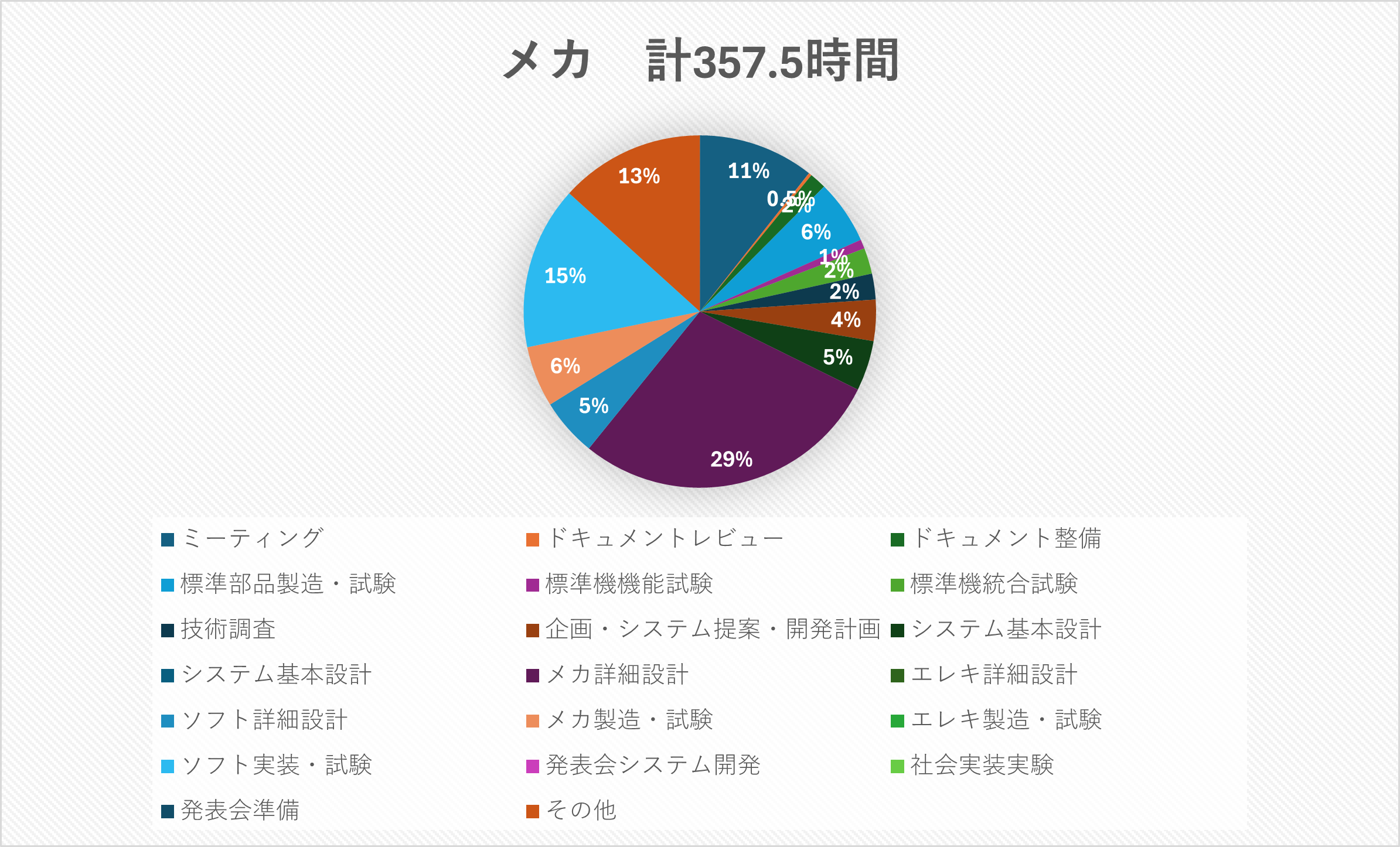
figure5-3.作業時間割合(メカ)
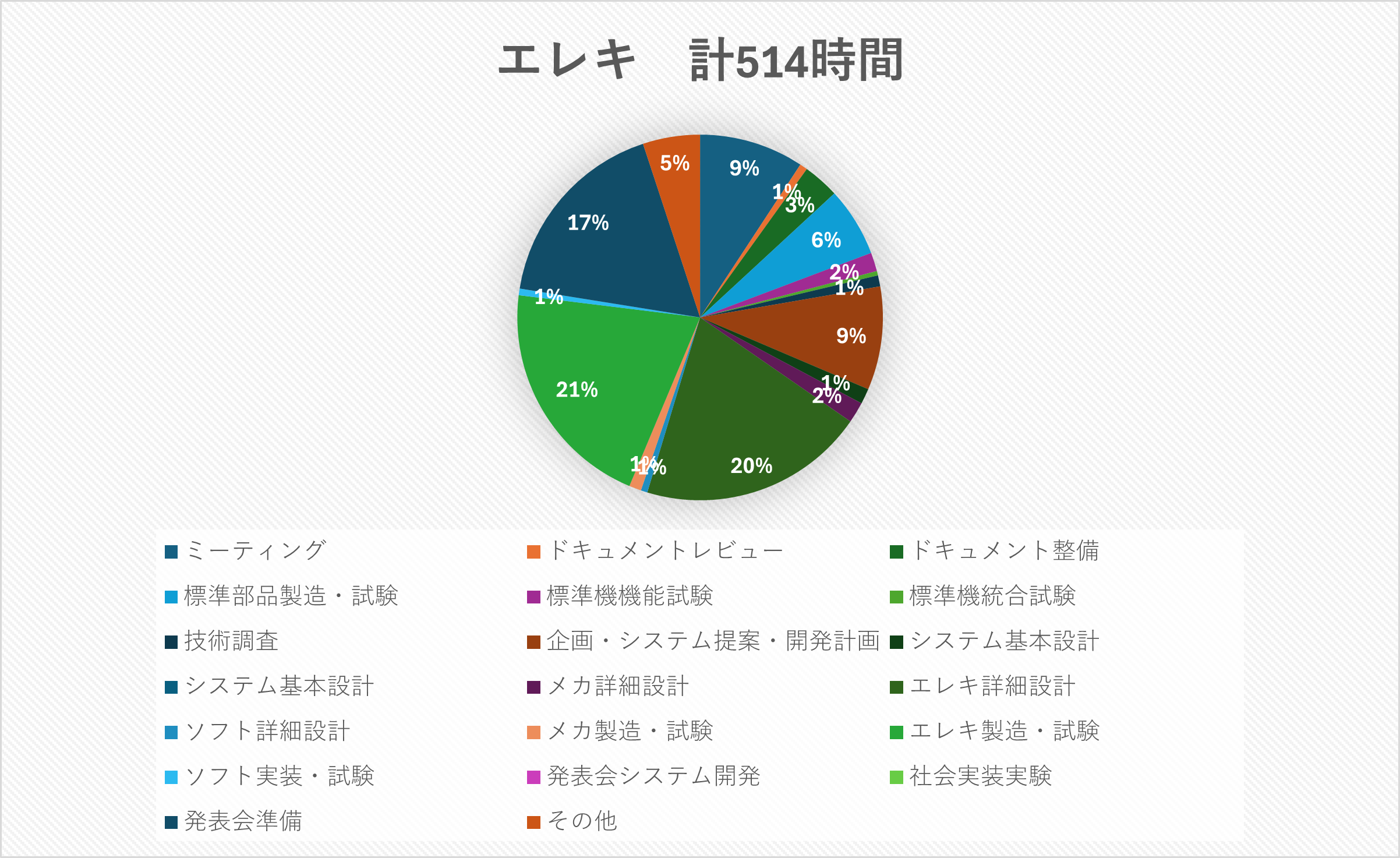
figure5-4.作業時間割合(エレキ)
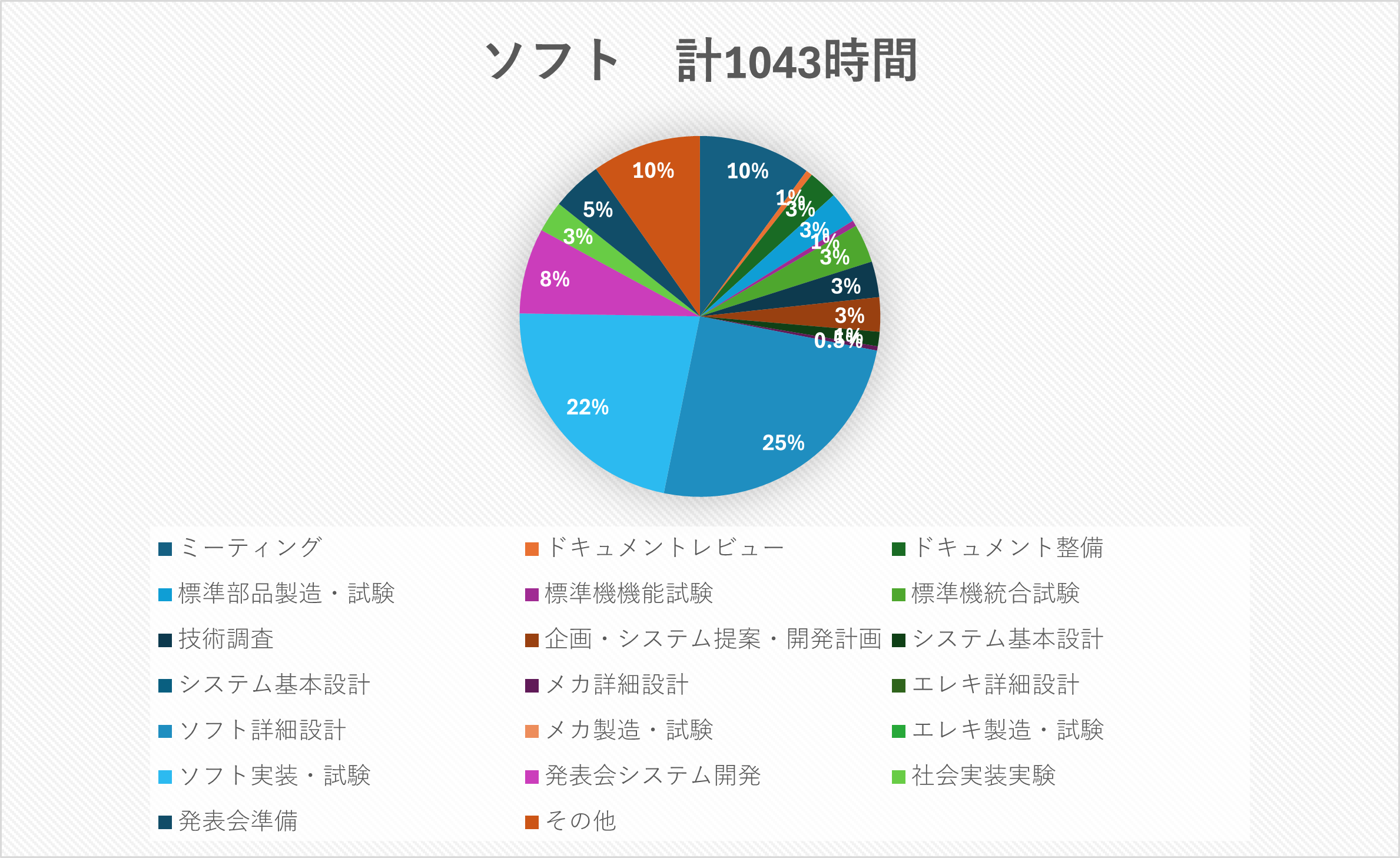
figure5-5.作業時間割合(ソフト)
各パート毎の分析を以下に示す。
計画的に作業しようと6月の終わりから設計を始めたが、夏休み中に全く作業をしなかったせいで後期に大変な思いをした。
夏休みが明けてから急いで設計したためか、設計の段階でのミスが多く、製造の段階での手戻りが多かった。
度重なるミスでASSYの組み立てが遅れ、全体が組み上がったのは発表会1週間前であった。
しかし、最終的には剛性や可動域に問題がなく、初めてのロボットアームにしては完成度は高いと思う。
エアチャックへの挑戦も成功し、ポンプも問題なく動作した。
よって全体的には満足のいく結果であった。
回路の設計や基板の製作、各モジュールの製作については短時間で終わらせることができたが、
ケーブル作成にとても時間がかかった。
また、ロボットアームと組み合わせたときに出てきた不具合に対処するために付けたコンデンサが、ロボットから飛び出る形になり、
とても不格好になってしまった。
最終的には当初目標としていたものが作れたので良かった。
ソフトとしては、実機完成後に、実際に動かすことで、想定していない不具合が見つかり、その調整が大変であった。具体的には、アームの角度による負荷の違いが想定より大きく、角度によって出力が変化する制御をする必要があった。
一番の懸念点である、紙の取得については、無事に紙を取ることができ、とてもよかった。
全体的にスケジュール通りに進まず、遅れ気味であった。これは、各役職ごとの連携不足や、実機の完成が遅れたことが原因としてあげられる。
改善策としては、同時並行して開発できる工程を見極め、実行することが大切だと考えられる。例えば、開発初期はメカの仕事が多く、ソフトの仕事は少なめであったため、ソフトがメカとなって、組み立てなどをすることが改善策として考えられる。
MIRS2405の班員の所感を以下に示す。
計画的に作業しようと6月の終わりから設計を始めたが、夏休み中に全く作業をしなかったせいで後期に大変な思いをした。
夏休みが明けてから急いで設計したためか、設計の段階でのミスが多く、製造の段階での手戻りが多かった。
度重なるミスでASSYの組み立てが遅れ、全体が組み上がったのは発表会1週間前であった。
しかし、最終的には剛性や可動域に問題がなく、初めてのロボットアームにしては完成度は高いと思う。
エアチャックへの挑戦も成功し、ポンプも問題なく動作した。
よって全体的には満足のいく結果であった。
エレキとしてはガントチャートから遅れるものの比較的早くに作業を終えることができた(ケーブル作成を除く)。
一方TLとしては、開発の遅れを改善することができなかった上本来実装するはずだった機能も実装しきれていない部分が多くある。
ケーブル作成もメカとの連携不足で、必要な長さや必要なコネクタの個数も決まらない状態が長く続いた。
これらは作業前のミーティングをしっかり行うことや、パート間での意識のすり合わせを徹底することで防ぐことができたかもしれない。
電源制御回路に絶縁型DCDCやプッシュプル回路を載せられたので楽しかったが、コンバータを同期整流型で作っても良かった気がする。
とりあえず動くロボットアームが出来たので良かった。
今回のMIRSで私はソフトを担当した。
実際の開発スケジュールとガントチャートでは大きくずれてしまったため、実際に計画して作業する大変さを実感した。
主に画像認識のプログラムと通信のプログラムを書いたため、ハードに影響されずに開発をすすめられた。
mirs発表会の先日までソフトのプログラムの微調整をしていたため、ソフトの大変さを実感した。
最終的には、画像認識のプログラムが上手く動作したため良かった。
基本設計段階でのガントチャートから大きくずれてしまい、計画の大切さを実感した。
私は、メイン機能であるアームの制御を担当したため、発表会までに制御できてよかった。紙の取得についても達成できてよかった。
一方、メカやエレキとの連携不足があったと感じた。例えば、マイコンのピン配置や、実際のポテンショメータの向きなど、メカやエレキと共有を早めにすることで互いにより早く開発をできると思った。
小型ロボットを自分たちで設計、作成するという作業が初めてだったため、最初は何をすればいいかわからなかった。
しかし、リーダーから割り振られた仕事を試行錯誤しながらこなしていくうちにやるべきことを理解できるようになり、発表会の直前では遅れている実装を間に合わせるため、自主的に改良や制作に取り組むことができた。
結果的に満足できるロボットを作成することができ、自身の技術力や経験を大いに高められた一年間になったと思う。自身の至らないところや理解の及ばない分野も把握することができたので、今後の学びや活動へと活かしていきたい。
実装はされていないが、担当していたWebアプリがあったが、自分にとって全く新しいJavaScriptやPythonに触れ、イメージほど敬遠するものではなかったなと思うと同時に、エラーの多さと修正の大変を身にしみて感じた。
余裕のある計画だからと後回しにして、どんどん計画から遅れていき、計画よりも余裕をもたせることが大事なんだなと感じた。
今回主にやったことはシステム提案のスライド製作、発表、一部基盤の設計、基盤加工機の修理、基盤加工、スライド製作、発表、pv製作だった。
エレキ面に関しては本当に宇佐見が凄すぎて、見て学ぶことが多かった。MIRS始めたてはエレキにあまり関心がなかったが、宇佐見と一緒にエレキをやる上で関心を持った。
今後個人的にも宇佐見と同じ環境に居れる内にエレキの活動をしていきたいと思う。
開発工程表で計画したスケジュール通りに作業が進まず、計画性の大切さを感じた。
私はデバイス間通信、ラジコンプログラムを担当し、通信の不具合の原因解明と改善ができたためよかった。mirsを通じてpythonやArduino言語に触れることができてよかった。