 |
| fig.1 AQUA 外観 |
| 名称 | MIRS2404 基本設計書 |
|---|---|
| 番号 | MIRS2404-DSGN-0002 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2024.8.9 | 大内 雅寛 | 初版 | |
| A02 | 2024.8.9 | 大内 雅寛 | 第2版 タブレットに気温を表示し熱中症対策を呼び掛ける機能を削除 |
|
| A03 | 2024.8.9 | 原川 一翔 | 第3版 fig.7を変更 Jetson,Arduino → Jetson Nano,Arduino Uno |
|
| A04 | 2024.8.9 | 加藤 創 | 第4版 figの名前変更及びメカの説明文追加 |
|
| A05 | 2024.8.9 | 北川 雄太 | 第5版 メカの説明文を変更 アルミフレームとアクリル板を使い、組み立てて、外装にはプラスチックダンボールを用いる。 → アルミ角パイプとミスミフレームでフレームを作る。外装には基本的にアクリルを用いるが、予算が足りなかった場合はプラスチック段ボールも併用する。 fig.2を変更及び説明文の追加 |
|
| B01 | 2024.11.12 | 原川 一翔 | 第6版 基本接続図を変更 購入物品を追加 |
|
| B02 | 2024.11.22 | 西川 真結 | 第7版 基本接続図を変更 スイッチ仕様の表を追加 |
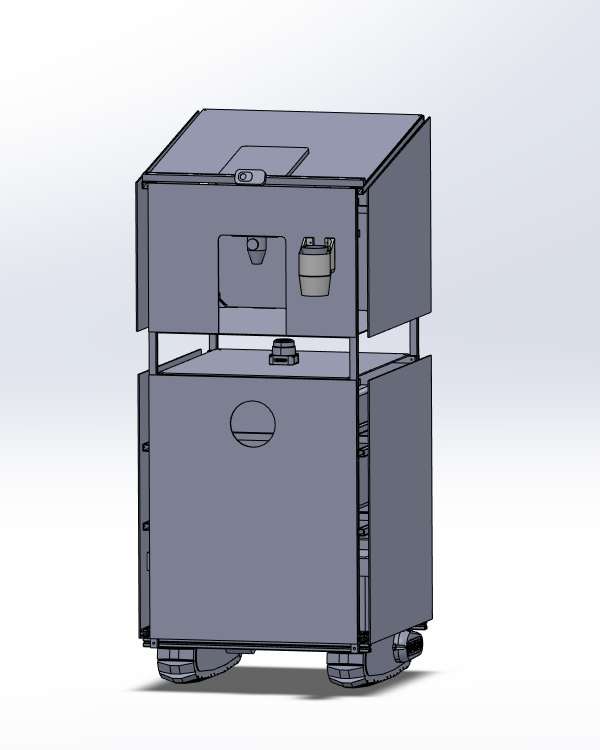
AQUAは、自律移動型ウォーターサーバーロボットである。自律移動しながら水を配ることで、校内のどんな場所でも水分補給を可能にする。
AQUAの全体像を以下に示す。下にあるタンクからポンプを用いて水を上部にある小さなタンクに入れ、チューブの開閉を行うことで水量の調整を行う。
|
| fig.1 AQUA 外観 |
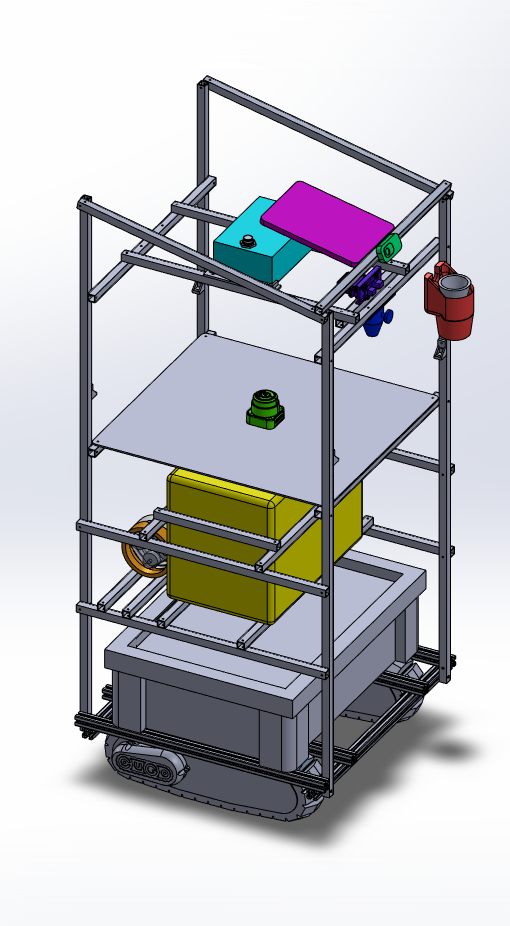 |
| fig.2 AQUA フレームと部品配置 |
アルミ角パイプとミスミフレームでフレームを作る。外装には基本的にアクリルを用いるが、予算が足りなかった場合はプラスチック段ボールも併用する。現段階では設計途中のため、細部の形状は変更する予定である。
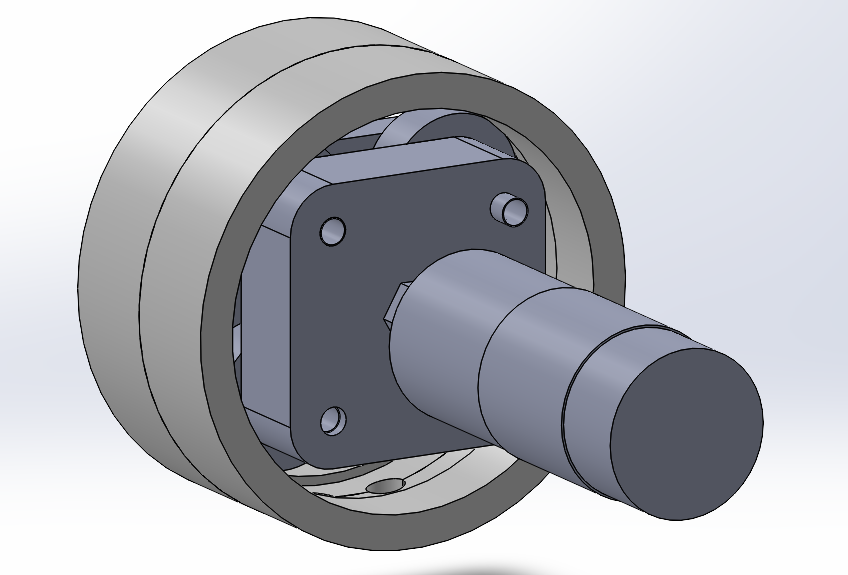 |
| fig.3 ポンプ全体 |
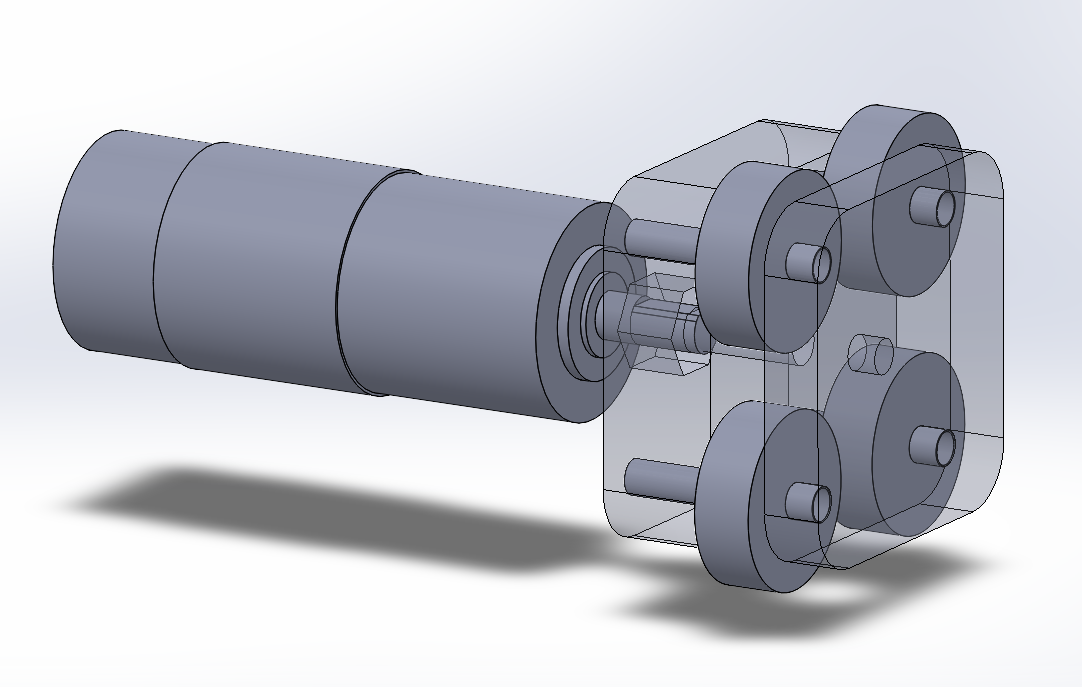 |
| fig.4 ポンプ内部構造 |
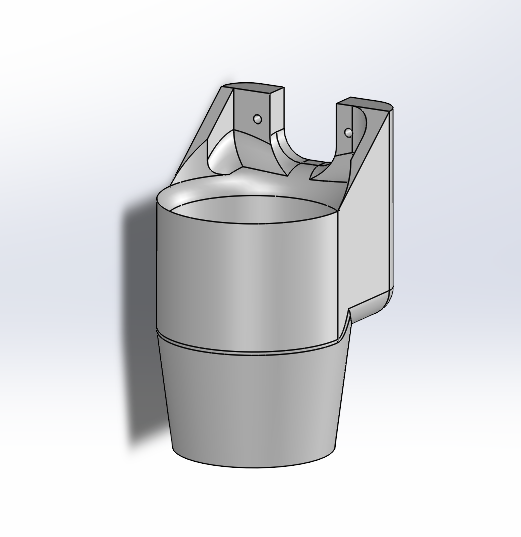 |
| fig.5 紙コップディスペンサー |
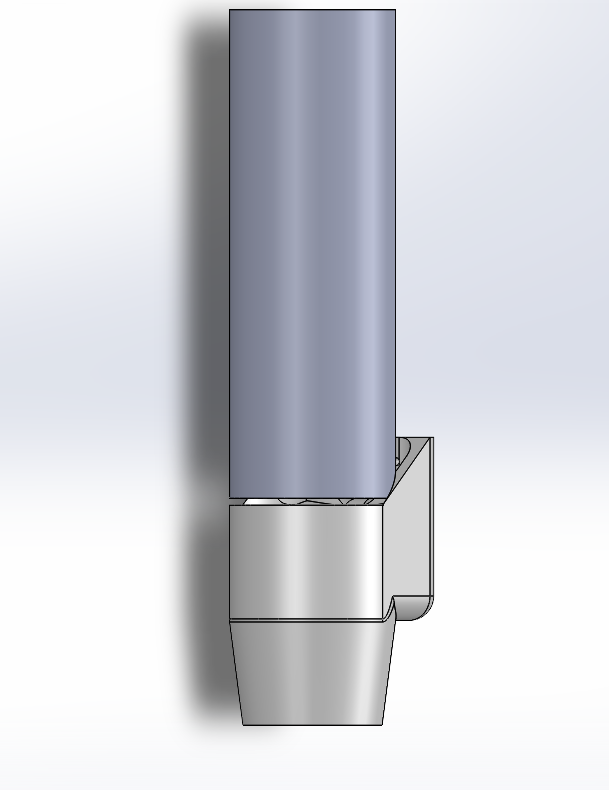 |
| fig.6 紙コップディスペンサー(プラ段付き) |
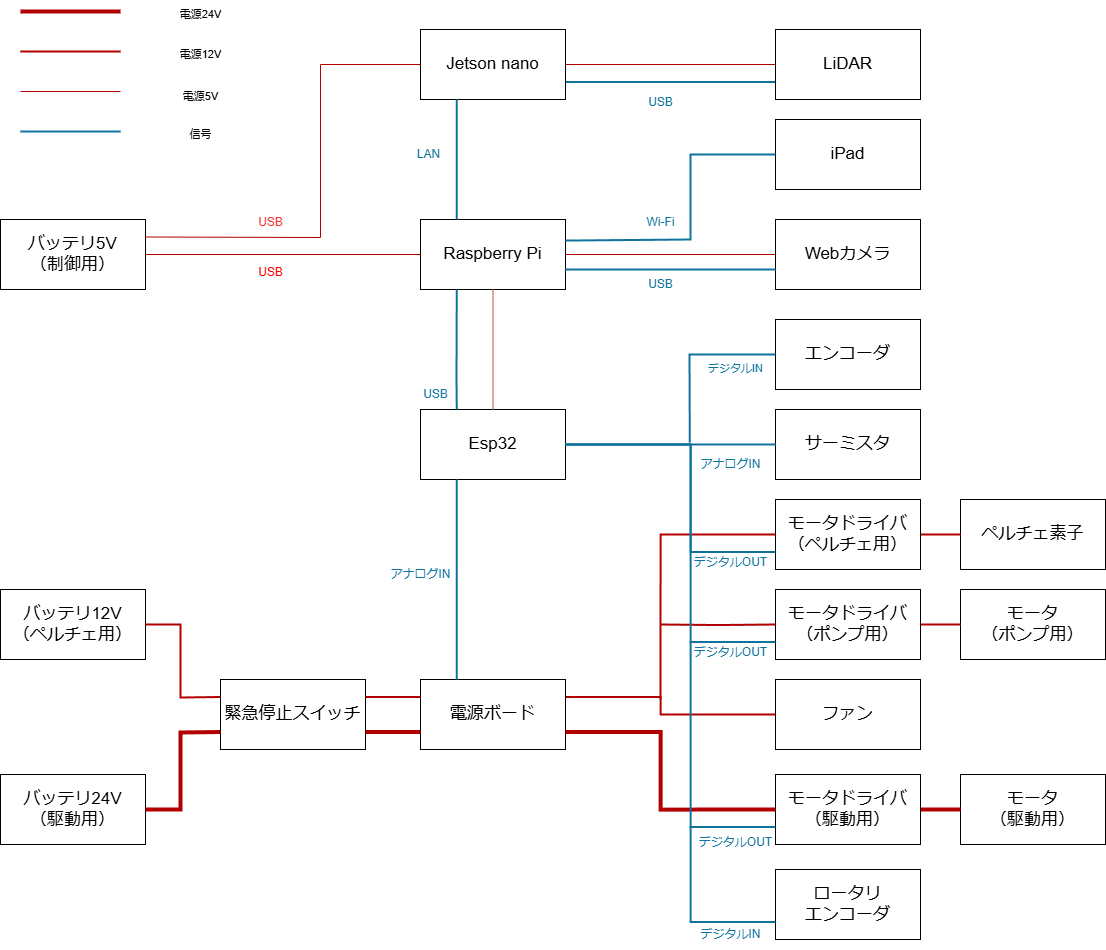 |
| fig.7 全体の基本接続図 |
| 供給元 | 供給電源電圧 | 供給先 |
|---|---|---|
| 制御用バッテリ | 5.0V | Raspberry Pi |
| 駆動用バッテリ | 24.0V | モータドライバ |
| ペルチェ用バッテリ | 12.0V | モータドライバ |
| 名称 | 制御するバッテリ | 詳細 |
|---|---|---|
| 非常停止用押しボタンスイッチ | 駆動用・ペルチェ用 | 標準機搭載 |
| トグルスイッチ | 駆動用 | 標準機搭載 |
| トグルスイッチ | ペルチェ用 | S-331T |
| 名称 | 使用用途 | 接続方式 |
|---|---|---|
| Webカメラ | 障害物の認識 | USB |
| LiDAR | 自己位置の推定 | USB |
| 走行用モータ | 走行 | PWM |
| ロータリエンコーダ | 移動量の計測 | デジタルI/O |
| 名称 | 使用用途 | 接続方式 |
|---|---|---|
| ポンプ用モータ | 水をくみ上げる | PWM |
| サーミスタ | ミニタンクの温度計測 | アナログI/O |
| ペルチェ素子 | ミニタンクの温度調節 | PWM |
| ペルチェ用ファン | ペルチェ素子の排熱 | ON-OFF |
| サーボモータ | 水を出すコックの動作 | PWM |
ソフトの全体構成をtable5に示す。
| 動作環境 | 機能 | 詳細 |
|---|---|---|
| Raspberry Pi | 全体機能の統括 | Arduinoとの通信(足回り・ポンプのモーターへの指令) |
| Jetsonとの通信(自己位置・カメラの情報の受け取り) | ||
| タブレットからのAQUAへの指令の受け取り | ||
| Arduino Uno | モーター制御 | 走行およびポンプ用のモーターの制御を行う |
| ミニタンクの温度管理 | サーミスタ・ペルチェ素子を用いてミニタンクの温度調節を行う | |
| Jetson Nano | 人の認識 | Webカメラを用いて走行中に人が前にいたら減速する |
| 自己位置推定 | LiDARを用いて自己位置推定を行う | |
| タブレット | AQUAの操作 | 移動の停止、給水、移動の再開の操作を行う |
| Web | 位置情報の共有 | AQUAの現在位置と今後の移動先を掲載する |
| ROS2・ソケット通信 | 各デバイス間の通信 | ROS2を用いてRaspberry Pi・Jetson Nano・LiDAR間の通信を、Raspberry Pi・Arduino Uno間ではソケット通信を行う |
ただし、Jetson Nanoで処理が出来ないようであれば、人の認識または自己位置推定のどちらかの機能をRaspberry Piで行うように変更する。
開発工程表を以下に示す。
MIRS2404 開発工程表