| 名称 | MIRS2403 基本設計書 |
|---|---|
| 番号 | MIRS2403-DSGN-0002 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A05 | 2024.11.22 | 中村 介 | 小谷先生 | 第五版 |
| A06 | 2024.12.2 | 舟久保 友花 | 小谷先生 | 第六版 |
MIRS2403は会場設営のための椅子ならべを行うロボットである。仕事をロボットに代行させることで運営コストを削減し、イベントを活性化させることを目指す。
本プロジェクトの主な機能と性能は以下の3つとなる。
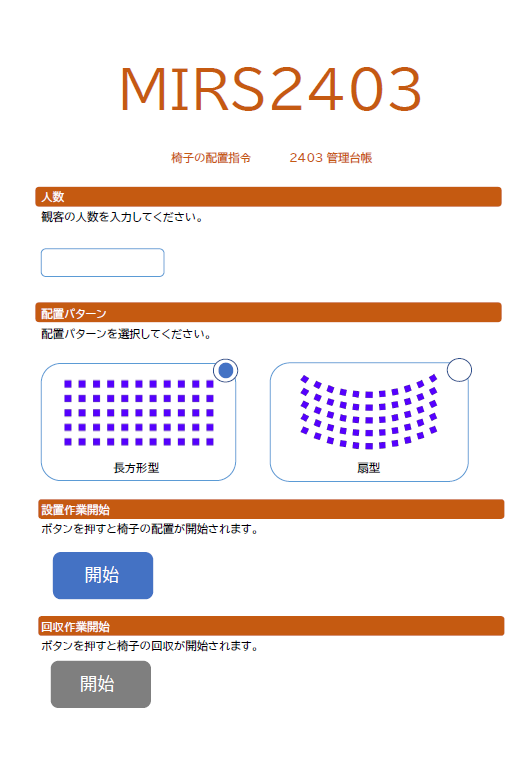
設置作業をしたい場合、ユーザーは体育館で椅子をラックから降ろし、
webアプリ上のfig.1のような入力画面で人数と配置タイプを入力した後開始ボタンを押すと、華蟻が作業を開始する。
華蟻が作業を完了するとwebアプリに完了通知がいくため、現地で作業結果を確認する。
回収作業をしたい場合、ユーザーはwebアプリ上の回収開始ボタンを押し華蟻に作業を開始させる。
華蟻が回収した椅子をユーザーがラックに片付ける。華蟻はすべての椅子を運び終えると完了報告を送る。
httpでユーザーのデバイスと華蟻間で通信を行う。ユーザーはWEBアプリを介して椅子の配置位置・動作開始の指示をすることができる。
動作開始位置はあらかじめ登録させておく。椅子の配置は事前にいくつかアセットを登録させておき、ユーザーがその中から選んで注文を行う。
前方向きのカメラで椅子を認識し、ジャッキに取り付けた上方向きのカメラで椅子の裏を確認し椅子の向きを認識する。
椅子の下に潜り込んで椅子を持ち上げ移動する。移動経路は自動生成される。目的地まで移動したら椅子をおろす。
LiDARとエンコーダーを用いて自己位置推定を行い、移動経路を自動決定する。
椅子の認識には画像認識を用い、椅子の持ち上げにはジャッキを改造したものを用いる。耐荷重は10kg。走行速度は最大1m/s。
対象となる椅子は、体育館の椅子を想定している。
運搬と逆の動作を行い、配置記録をもとに椅子を回収する。
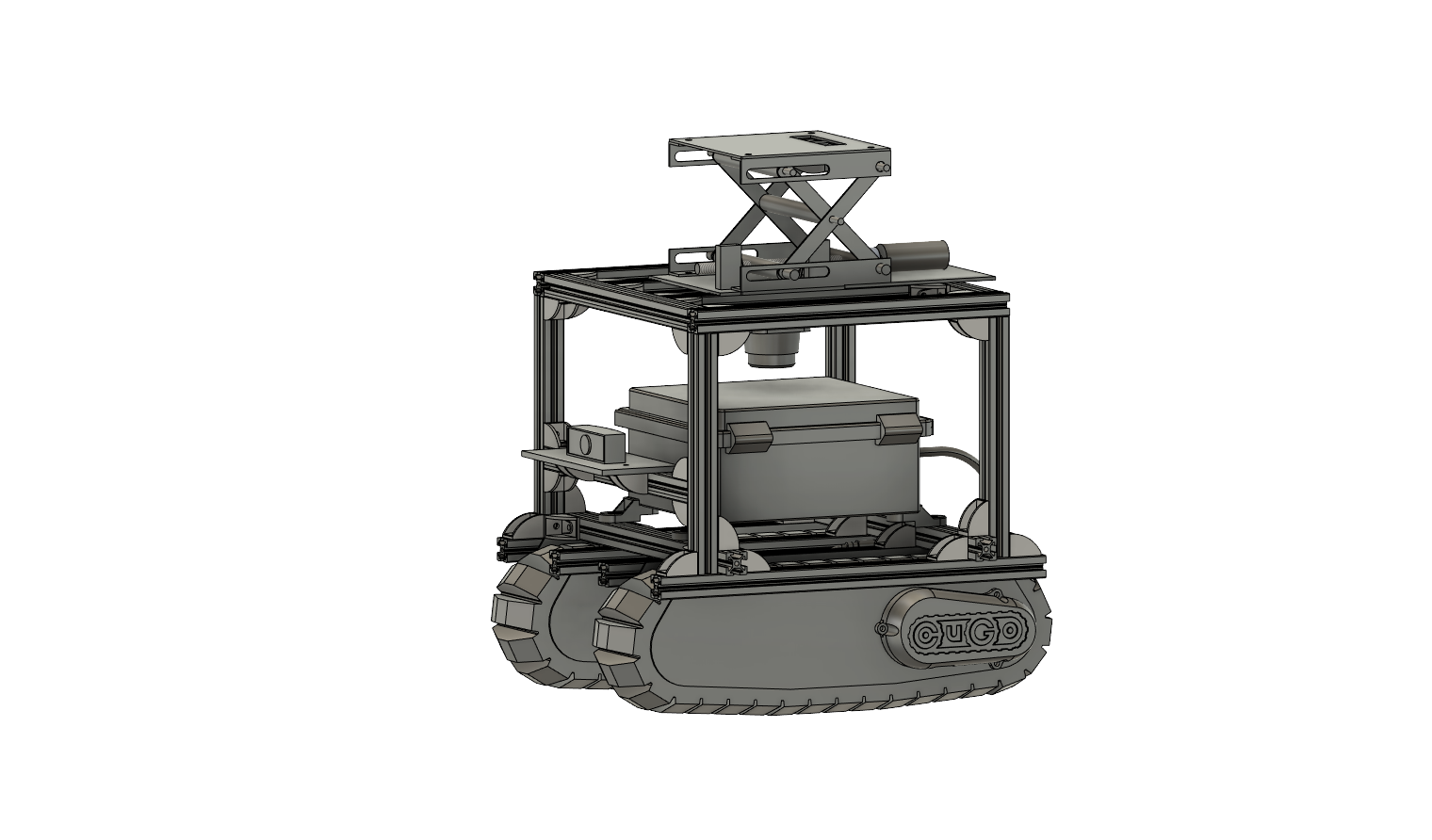
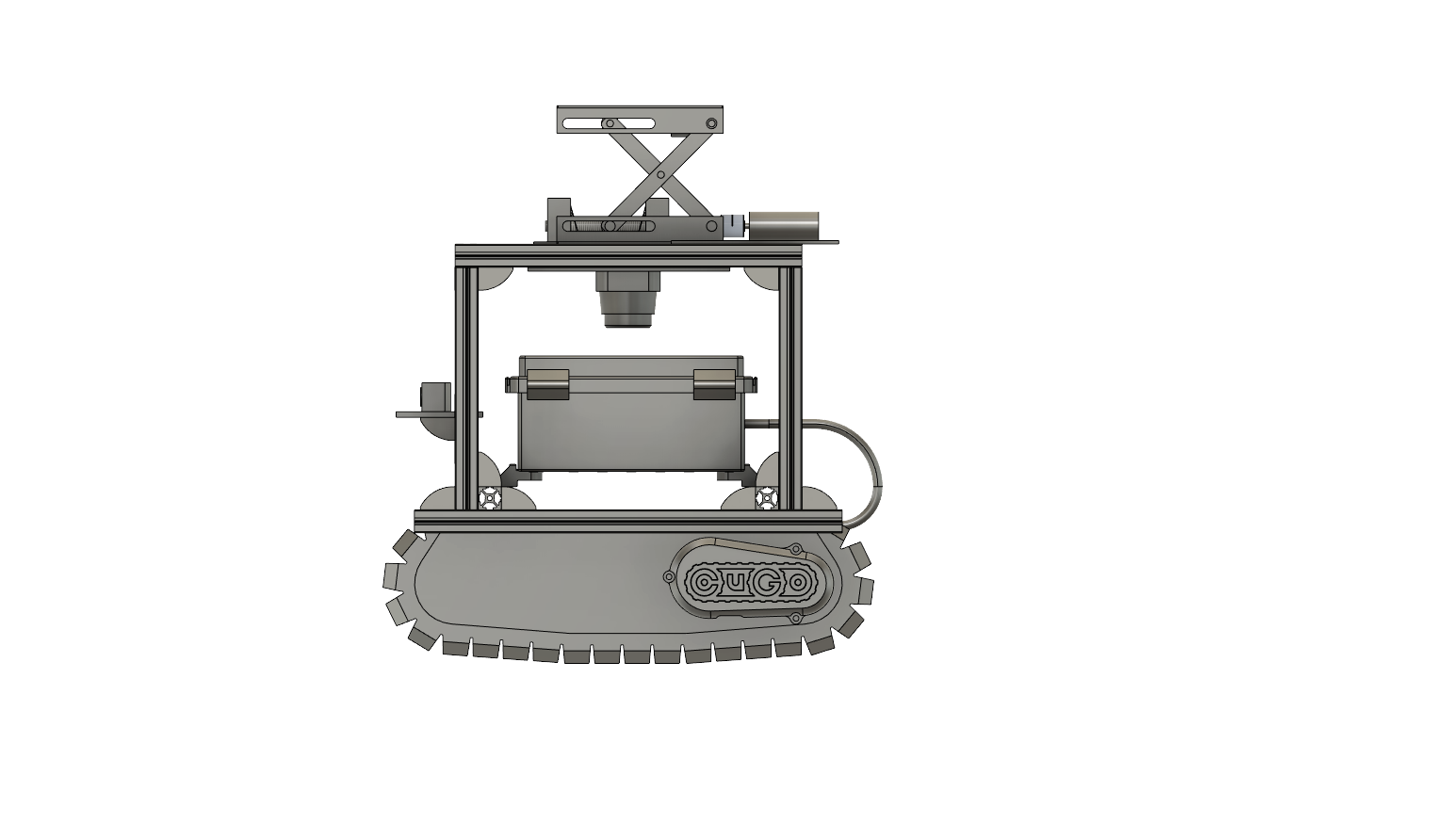
全体の概形についてfig.2とfig.3に示す。
アルミフレームを用いて外形を作成する。
カメラを前面につけ、機体上部には改造したラボジャッキを設置し、
その裏面に上下を反転させたLiDARを設置する。
|
|
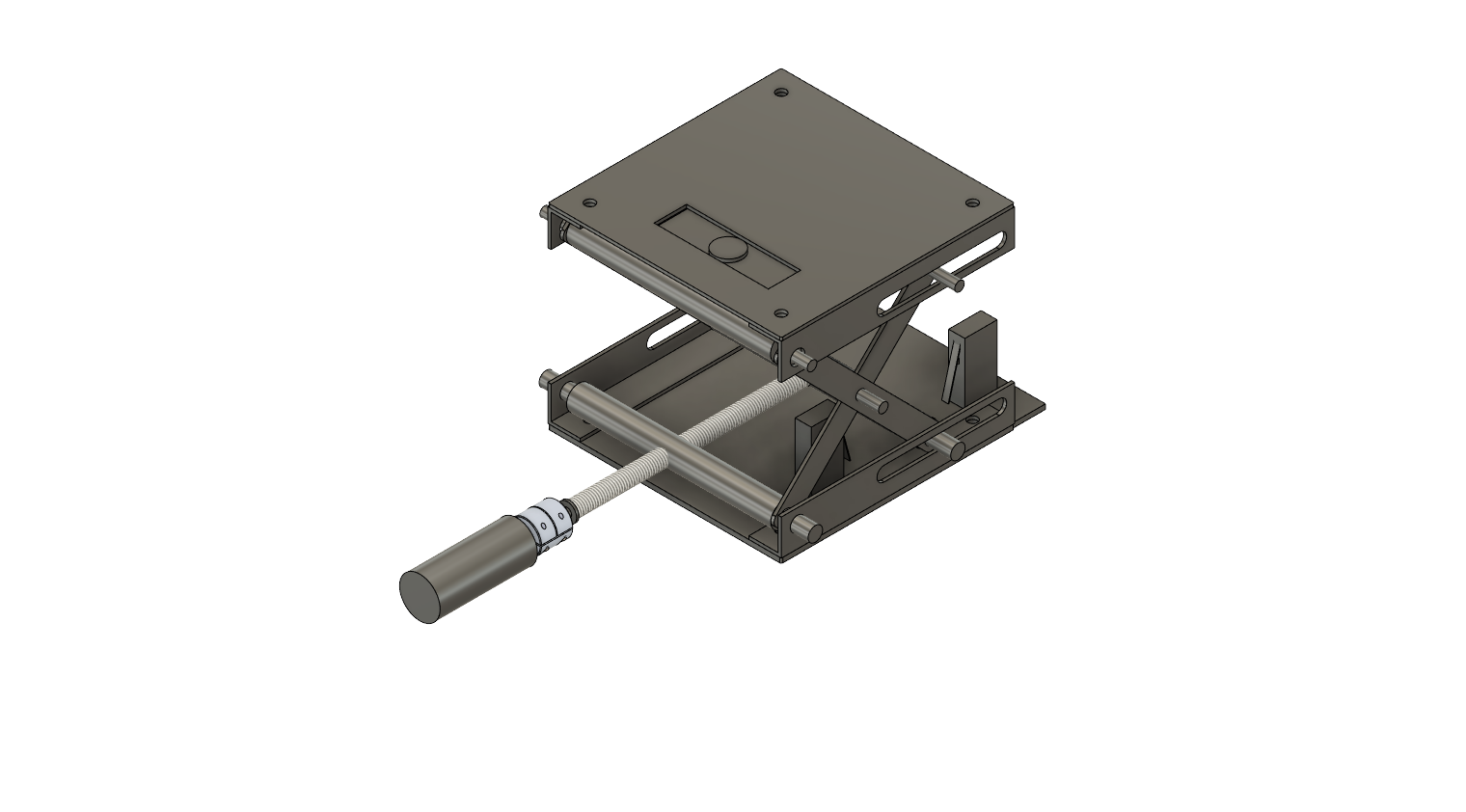
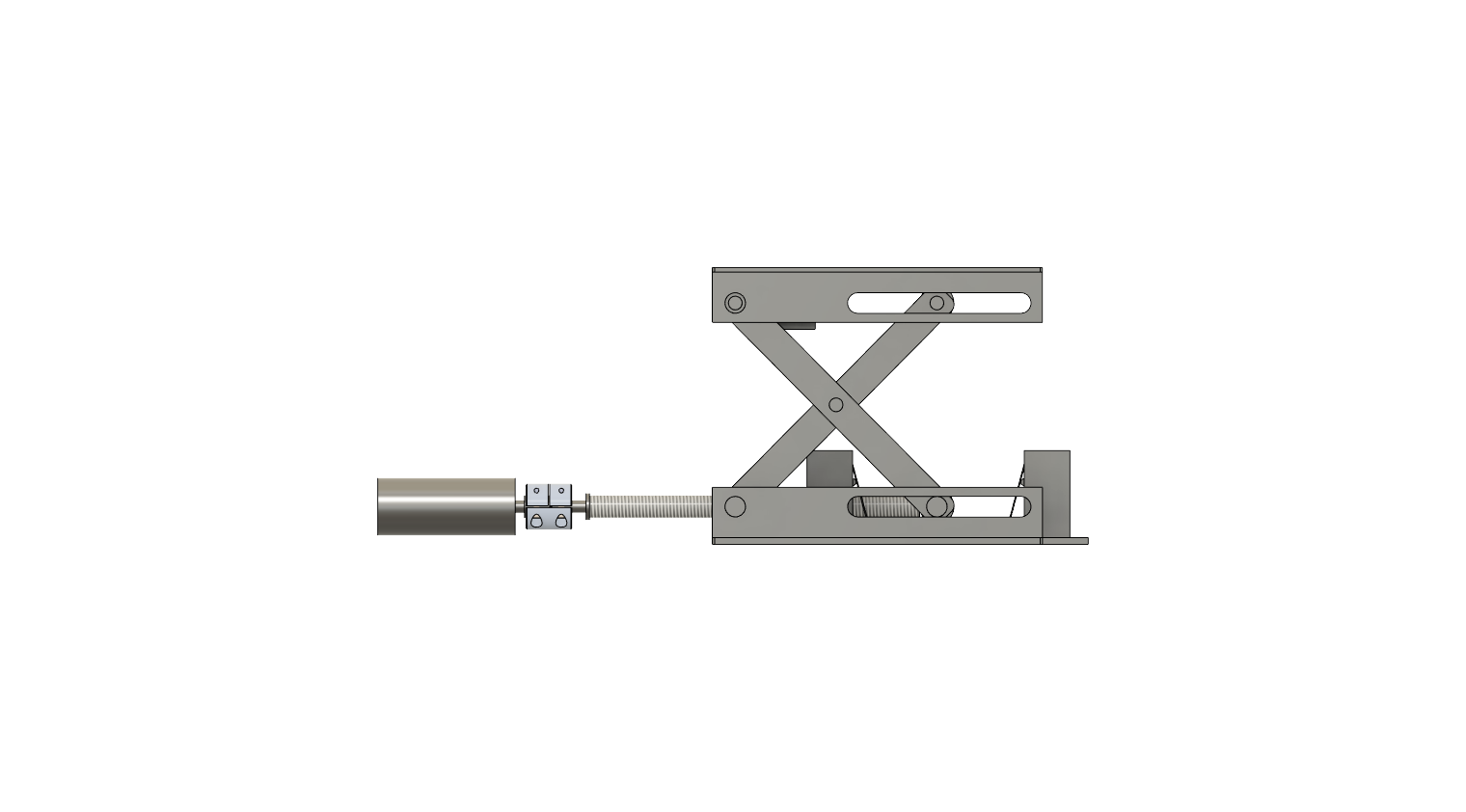
ジャッキの概形についてfig.4とfig.5に示す。
ジャッキ上部の天面にはカメラを設置する。
ジャッキについていたハンドルをはずし、昇降用のねじとモーターをカップリングで接続する。
ジャッキの昇降を管理するリミットスイッチはジャッキ下部に設置し、水平に動く機構部分に当てる。
また、段数を一段減らしリンク機構の数を減らす。
|
|
エレクトロニクスのシステム構成についてfig.6に示す。
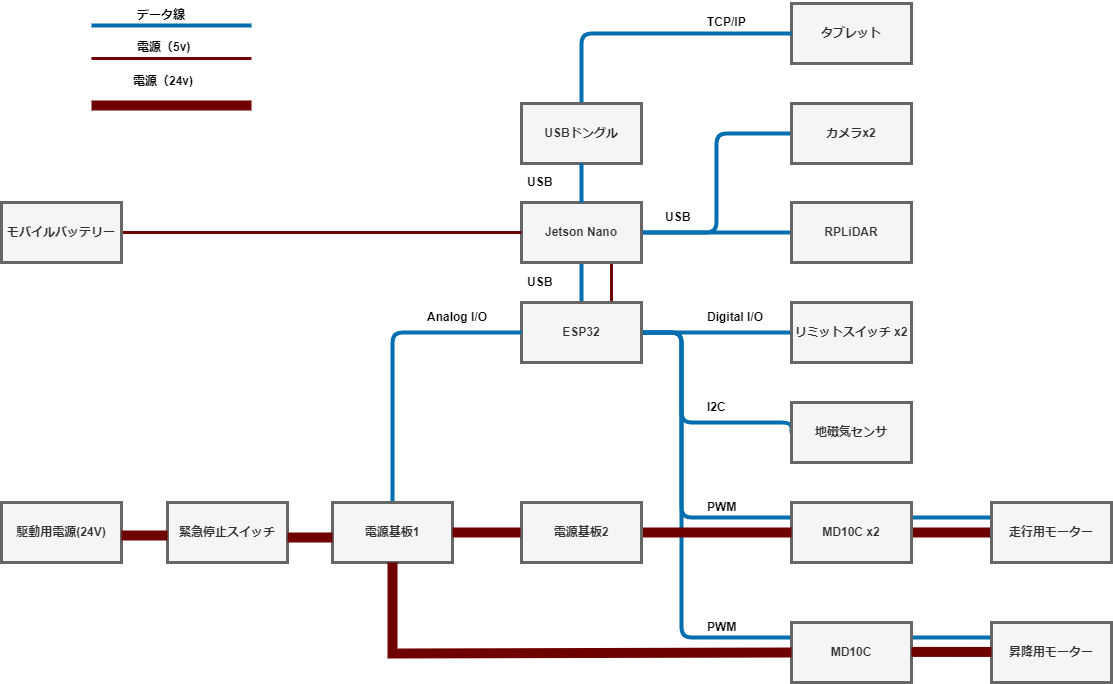
電源に関する仕様をtable1に示す。
| 名称 | 個数 | 供給電圧(V) | 接続先 | 使用用途 |
|---|---|---|---|---|
| 駆動用バッテリー | 1 | 24 | モータードライバー | 電源 |
| 駆動用バッテリー | 1 | 7.4 | モータードライバー | 電源 |
| 制御用電源 | 1 | 5 | Jetson Nano, ESP32 | 電源 |
| 電圧監視基板 | 1 | - | ESP32,電源基板 | バッテリー電圧の管理 |
| 電源基板 | 2 | - | 電圧監視基板,MD10C | 駆動電源の個別管理 |
| 緊急停止 | 1 | 5 | 駆動用電源 | 緊急停止 |
センサ・IFに関する仕様をtable2に示す。
| 名称 | 個数 | 使用用途 | 接続方法 |
|---|---|---|---|
| USBカメラ | 2 | 画像認識 | USB |
| LiDAR | 1 | マッピング、自己位置推定、椅子の配置位置調整、椅子の認識 | USB |
| リミットスイッチ | 2 | 縮んだ状態、伸びた状態の停止位置を検知 | Digital I/O |
| 地磁気センサ | 1 | 機体の方向の検知 | I2C |
駆動系に関する仕様をtable3に示す。
| 名称 | 個数 | 使用用途 |
|---|---|---|
| 走行用モーター | 2 | 移動 |
| ジャッキ用モーター | 1 | ジャッキの動作 |
機能概要をtable4に示す。
| 動作環境 | 機能 | 詳細 |
|---|---|---|
| Jetson Nano | Arduinoとの通信 | Arduinoからエンコーダーの値・バッテリー電圧・機体角度を受信し、速度指令値を送信する |
| 自己位置推定 | LiDARとエンコーダー、角度情報、マップデータから自己位置の推定を行う | |
| 経路作成 | 位置情報と現在配置した椅子の位置、次の椅子の配置位置を元に走行経路を作成する | |
| 走行制御 | 走行経路を元に走行用モーターの速度指令値を決定する | |
| 椅子認識 | LiDARとカメラの情報を元に次に運ぶ椅子の位置を認識する | |
| 椅子管理 | 現在配置した椅子と運搬中の椅子の情報管理 | |
| ジャッキ制御 | ジャッキの動作命令を出す | |
| WEBアプリ | ユーザー側のWEBアプリとの通信 | |
| 全体制御 | ロボット全体の動作フローの管理 | |
| Arduino UNO | Jetsonとの通信 | Jetsonから速度指令値を受信し、エンコーダーの値・バッテリー電圧・機体角度を送信する |
| 走行用モーター制御 | 走行用モーターの速度制御を行う | |
| ジャッキ用モーター制御 | ジャッキ用のモーター制御をリミットスイッチを用いて行う | |
| エンコーダー読み取り | エンコーダーの値の取得 | |
| 角度取得 | 9軸センサとI2C通信を行い、機体の方角情報を取得する | |
| WEBアプリ | WEBサイト | HTML,CSS等を用いてWEBサイトの装飾を行う |
| Jetsonとの通信 | Jetsonへ動作開始の指示・椅子の配置位置を送信し、椅子の配置状況を受信する |
ガントチャートを以下に示す。
ガントチャートの直リンク(pdf)