| 名称 | MIRS2403 プロジェクト企画書 |
|---|---|
| 番号 | MIRS2403-PRSN-0001 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A2 | 2024.06.26 | 中村介 | 小谷進 | 第二版 |
沼津高専にはイベントが少ない。イベントとは外部の人に高専を知ってもらう機会であり、その機会は多くあるべきだ。
しかし新たなイベントの開催は人手やお金等のコスト問題によって実現が難しくなっている。
学生課に聞いたところ、大きくコストのかかっていたイベントは主に入学式とテクノフォーラムの二つだった。
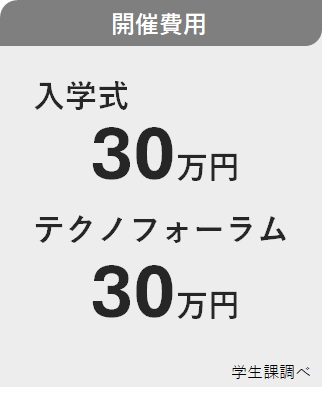
この金額はすべて椅子の整列などの会場設営費によるものだそうだ。
そこで、会場設営を代行してくれるロボットがあればイベントの開催コストを削減することができると考えた。
この60万円が削減できれば新たなイベントの開催に費用や人手を回すことができ、イベントが増やせるはずだ。
コンセプトは働きアリのようにコツコツときれいに椅子を並べてくれるロボットである。
これによってコストを削減し、イベントを活性化させることを目指す。
私たちの掲げるプロジェクトは華蟻プロジェクトである。
本プロジェクトのロボットの主な機能は以下の4つとなる。
ユーザーはWEBアプリを介して配置の手配をすることができる。
「椅子の配置位置」「開始位置」を入力することで手配ができ、人数データを入力することで自動的に座席配置を生成してくれる。
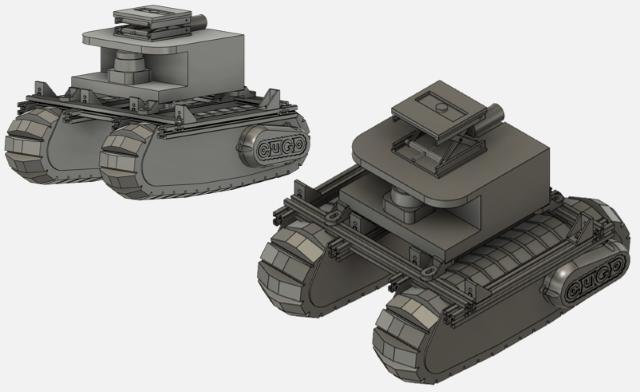
椅子を認識し、椅子の下に潜り込んで椅子を持ち上げ移動する。移動経路は自動生成される。目的地まで移動したら椅子をおろす。
運搬と逆の動作を行い、配置記録をもとに椅子を回収する。
倉庫ー体育館間でラックの移動を行い、椅子の積み下ろしや片付け時には椅子の積み上げを行う。
開発項目とその優先度の一覧を以下に示す。
| 機能 | 開発項目 | 担当 | 優先度 |
|---|---|---|---|
| 配置手配 | WEBアプリ開発 | S | A |
| 配置の自動生成 | S | B | |
| 椅子の運搬・回収 | 椅子の向きを取得 | S | A |
| 次に運ぶ椅子の位置を取得 | S | B | |
| 昇降装置の設計・作成 | M | A | |
| 椅子の下に潜り込める足回りの作成 | M | A | |
| 自己位置取得 | S | A | |
| mapデータ作成 | S | A | |
| 経路自動作成 | S | A | |
| 自動走行 | S | A | |
| ラックの運搬 | ラックを掴む機構の設計・作成 | M | C |
| 積み下ろし機構 | M | C | |
| 積み上げ機構 | M | C | |
| その他 | 電圧監視基板 | E | B |
開発担当 S:ソフト M:メカ E:エレキ
優先度 A:最優先 B:ぜひ搭載したい C:夢
購入予定物品の一覧を以下に示す。
| 物品 | 用途 | 備考 | 単価(円) | 個数 | 小計(円) |
|---|---|---|---|---|---|
| USBカメラ | 画像認識 | 配布の可能性あり | 2000 | 1 | 2000 |
| ラボジャッキ | 昇降機構 | ジャンクパーツ 改造して使用 | 0 | 1 | 0 |
| モーター | 昇降機構 | ジャンクパーツ | 0 | 1 | 0 |
| モータードライバー | 昇降機構 | 2068 | 1 | 2068 | |
| カップリング | 昇降機構 | 1470 | 1 | 1470 | |
| リミットスイッチ | 昇降機構 | 160 | 2 | 320 | |
| プラスチック段ボール | 外装 | 2000 | 1 | 2000 | |
| 9軸センサ | 方角取得用 | 2000 | 1 | 2000 | |
| RP2040搭載ボード | システム | micro-ros用 | 700 | 1 | 700 |
| MISUMIフレーム用ブラケット | フレーム | 200 | 10 | 2000 | |
| 合計 | 12558 |