1.はじめに
2.システム構成
3.回路図
3-1.電源基板
3-1.Arduino
3-2.ESP
4.使用物品
1.はじめに
本ドキュメントはMIRS2401GAPless、エレクトロニクスについてのドキュメントである。
2.システム構成
全体のシステム構成を以下に示す。
機能削減により,システム構成を変更した.変更後の全体図を開発完了報告書に示す.
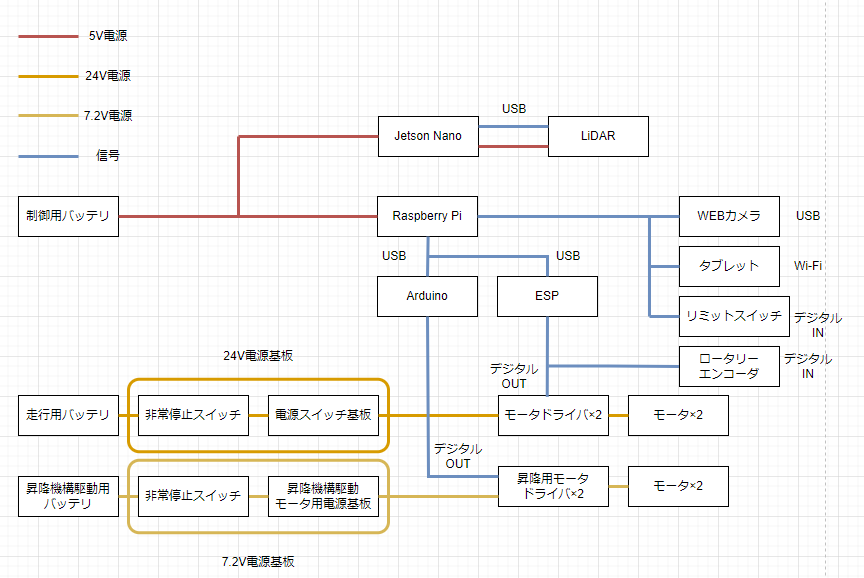
fig1. 全体接続図
3.回路図
以下に電源基板、Aruduino、ESPのそれぞれの回路図を示す。
3-1.電源基板
24V電源基板、7.2V電源基板の回路図を以下に示す。
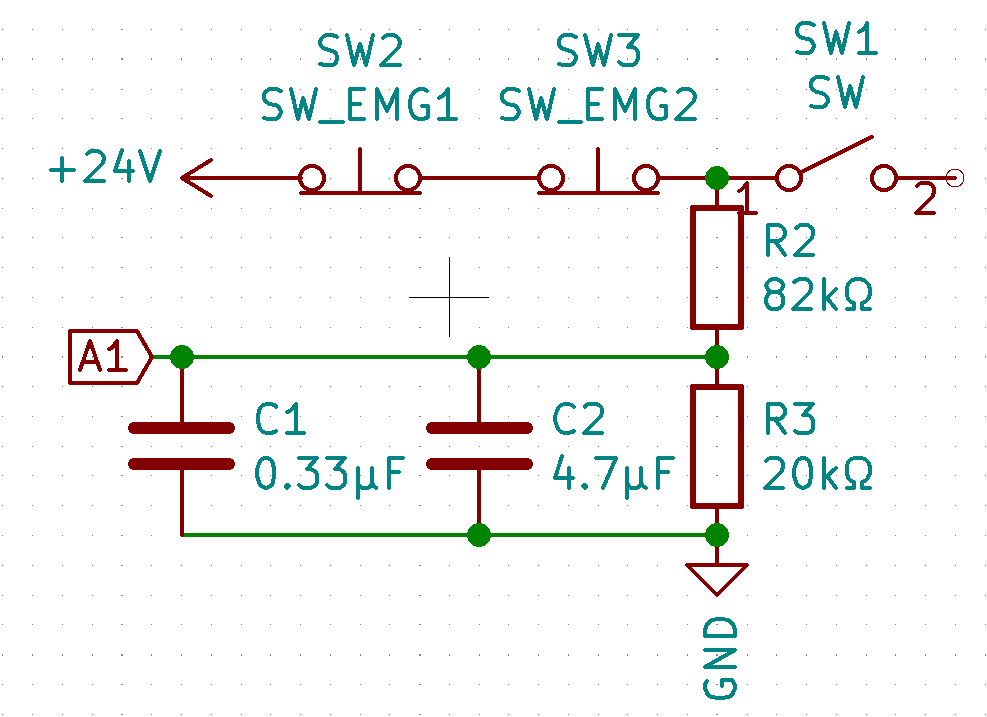
fig2. 24V電源基板 回路図
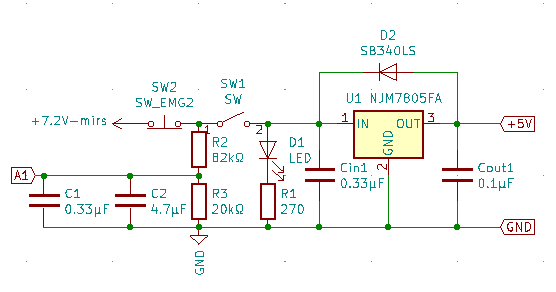
fig3. 7.2V電源基板 回路図
昇降用に用いる7.2V系の電源基板を作成する。赤色LEDを使用し、順電圧が2Vとすると電源電圧が7.2V時の電流は19mA程度となる。
7.2Vと24Vのバッテリーをarduinoのアナログピンに入力可能な5V以下に分圧して電圧を監視する。
この際、抵抗での消費電力は7.2Vで1.3mW、24Vで5.6mWである。
また低周波と高周波のノイズを軽減するため、2種のコンデンサを使用する。
緊急停止スイッチは操作しやすくするため、機体の上部と下部に2つ配置する。
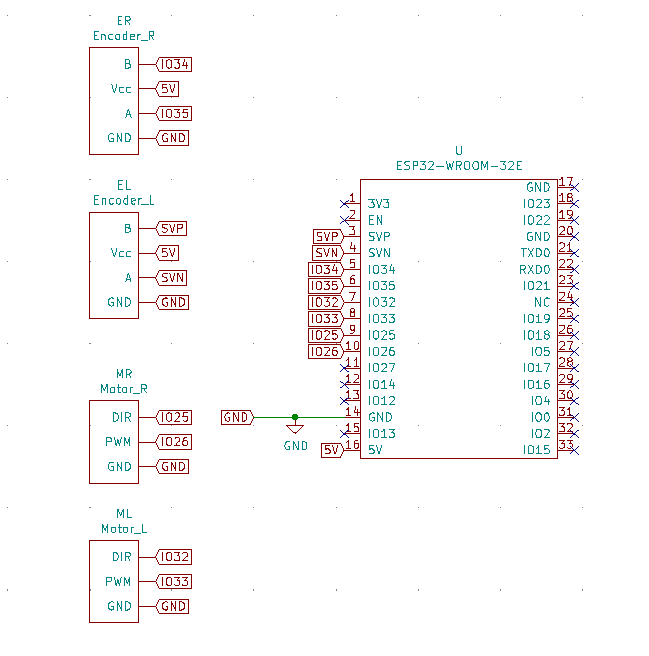
3-2.Arduino
Arduino、昇降用モータの接続図を以下に示す。
また、ピンの接続デバイスをtable.1に示す。
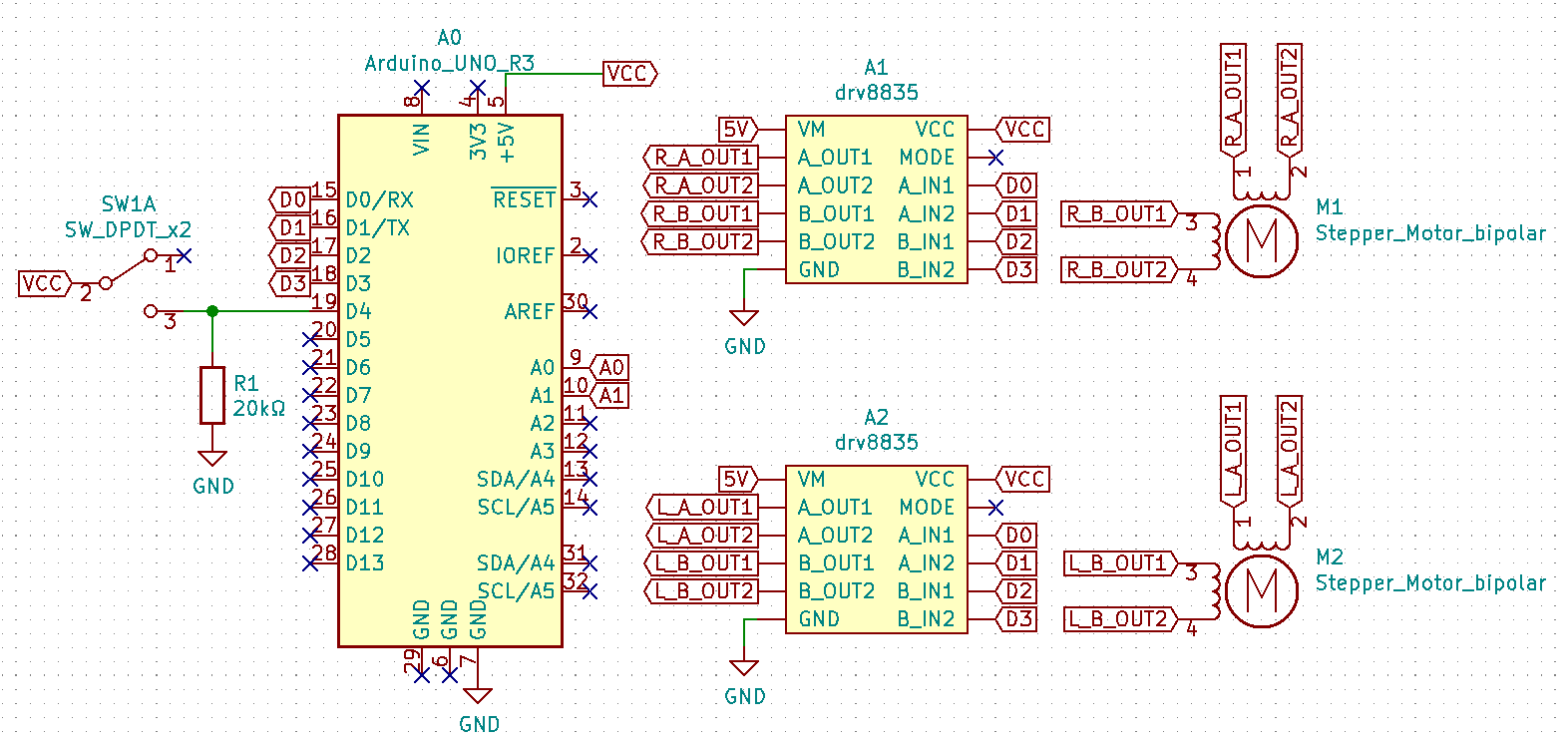
fig4.Arduino、昇降用モータ 接続図
table.1 Arduino の接続デバイス
fig1. 全体接続図
fig2. 24V電源基板 回路図
fig3. 7.2V電源基板 回路図
fig4.Arduino、昇降用モータ 接続図