
| 名称 | MIRS2303開発完了報告書 |
|---|---|
| 番号 | MIRS2303-REPT-0004 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2024.01.19 | 金子 桃花 | 初版 | |
| A02 | 2024.02.22 | 村井 陽向 | 第2版 |
本ドキュメントはMIRS2303における開発完了報告書である。完成した機体を以下に示す。

機体評価を表1に示す。システム統合会議で提示した項目で評価を行った。なお、未実装の機能項目については評価対象外とする。
| 機能 | 概要 | 評価 |
|---|---|---|
| 写真撮影 |
1. ライン(白)で示した地点で移動を停止する 2. 撮影する高さ、画角を自動で調整する 3. Webカメラで撮影する |
問題なく実装できた |
| 顔認証 |
1. 撮影未許可者の顔を前もって撮影し学習する 2. 実装実験で撮影した写真に対し、顔認証を行う 3. 撮影未許可者の顔を、撮影した写真の中で認識したら、その写真を削除する |
顔認識をするところまで実装できた D科には撮影未許可の学生がいなかったため事前撮影はなかった |
| 画角調整 |
1. 撮影時、その風景に最適な画角を提案し、自動調整・撮影を行う |
調整パターンを事前に作っておき、撮影時に自動調整することができた |
| カメラ昇降 |
1. 昇降用モータを回転させ、カメラの高さを変える |
実装はできたが、モータやギアによる昇降音が大きく、改善が必要 |
| カメラ角度調整 |
1. サーボモータを使用し、カメラの縦横の向きを変化させる |
実装はできたが、調整が難しく社会実装実験では使用しなかった |
| LiDAR走行 |
1. 走行場所のマッピングを行う 2. プログラムで進路を指定し、走行させる |
場所を指定し、人や物などの障害物がいなければ到着できる ※社会実装実験では使用しなかった |
| ライントレース走行 |
1. ライン(黒)上を走行する 2. ライン(白)で一時停止し、撮影を行う |
撮影は、ライン(白)で指定するのではなく2mごとに撮影するように実装した ライン(白)は進路の端の指示として使った |
| データ転送・Web公開 |
1. 撮影した写真をWebページに送信、公開する 2. 顔認証を行い、撮影未許可者を発見したら削除する |
問題なく実装できた ※2024/2/1 Webページ閉鎖 |
もともとの社会実装の期待値は高かった。しかし結果は技術賞は3位という結果だった。これについて以下のことが考えられる。
・授業中の動作にもかかわらず、動作音を無視しすぎていた。
・ライントレース走行により、他のチームがLiDAR走行しているのに比べて見劣りしてしまった。
・アンケート回答率が一番多かったのを生かすことができなかった。
今回、シンプルに「写真を撮影してWebにアップロード」を実演した。しかし、実際に社会実装の観点で考えると授業中の撮影であるから授業妨害になってはいけないということは想像できた。しかし機構の問題上、動作音がどうしても出てしまい、結果として動作音のクレームが多く寄せられた(アンケート結果より)。限られた工数の問題で解決することができなかった。将来的に実装する上で、解決しなければいけない。
LiDAR走行をしているチームがある中で、私たちはライントレース走行を選んだ。これは限られた工数の問題のなかで写真撮影機能と両立ができなかったことがあげられる。しかし、教室での撮影において狭い撮影スペースだったためライントレース走行で十分だった。しかし技術点を評価する上では他の班に見劣りしてしまった。
私たちの班は、アンケート対象者がD科の全学年の学生・保護者だった。そのため4つの班のなかで一番アンケート数を集めることができた。しかし考察の上でその良さを生かせなかったと考える。MIRSを経験してきたD5の先輩方とライントレースすら実装したことのないD1の学生では確かに評価は違ったかもしれない。学年ごとの評価を比べることによって、より回答の分布を比較することができたかもしれない。
・発表者は村井が担当した。
・発表用資料は村井、PVは佐藤、ブース内展示は金子、長瀬が担当した。
--発表について--
冬休みが入る前から準備を進めていた。私たちの班の強みは、教育後援会と協力することができたことと発表会前にデモ試験を実施していたことである。この2点を中心的に発表を行った。
発表の構成や、話し方など吟味しながら練習を行った。年始から香川先生を交えて練習することができたのはよかったと思う。
本番では緊張することなく発表することができた。開始早々マイクエラーがあったが落ち着いて対応することができた。
本番中、Webアップロードがうまくできなかった。落ち着いて対応することができたと思うが、そもそもリハーサルで試さなかった時点でWebページの公開は避けたほうがよかったかもしれない。
発表時間は、14分30秒程であった。発表時間15分に対し、しっかり収めることができたと思う。もしWebページをうまく公開できていればドンピシャだったかもしれない。
--展示について--
「沼津高専の広報担当」というコンセプトのもと、ブース内展示を多く作成してもらった。
下級生や保護者からポスターの評判が高かった。
PuNITを実際にブース内で動かし、撮影、Webアップロードを行った。記念撮影をしている人も多く、コンセプトを体現できたのではないかと思う。
音声を入れるなど、より観覧者とのふれあいを意識して企画しても良かったかもしれない。
以下に開発スケジュールを示す。黄色部分が予定していた作業、点線で囲まれた部分が実際の進捗である。
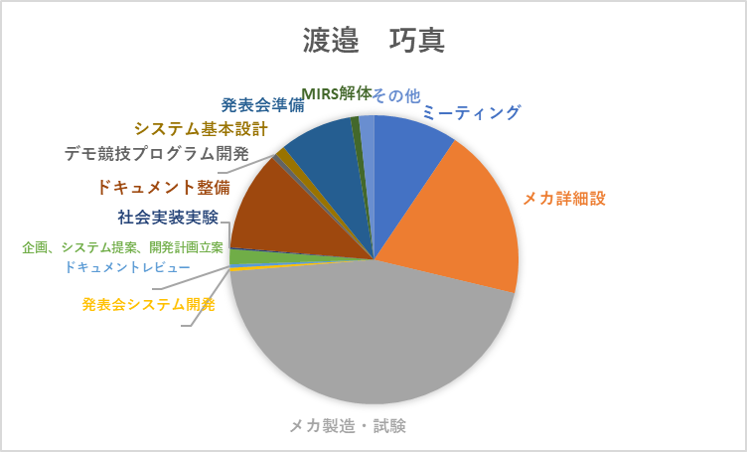
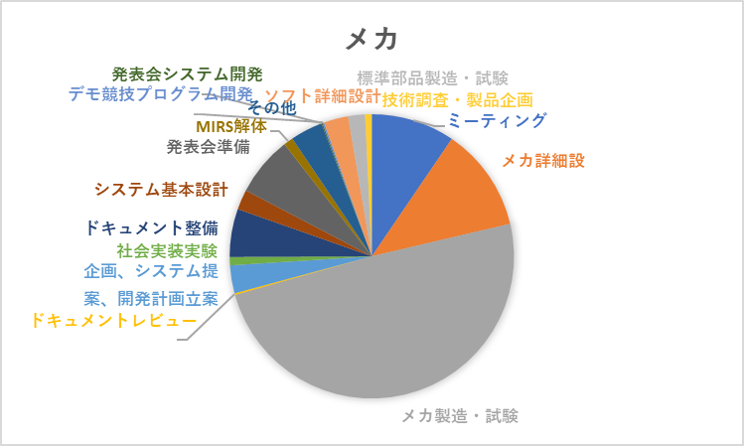
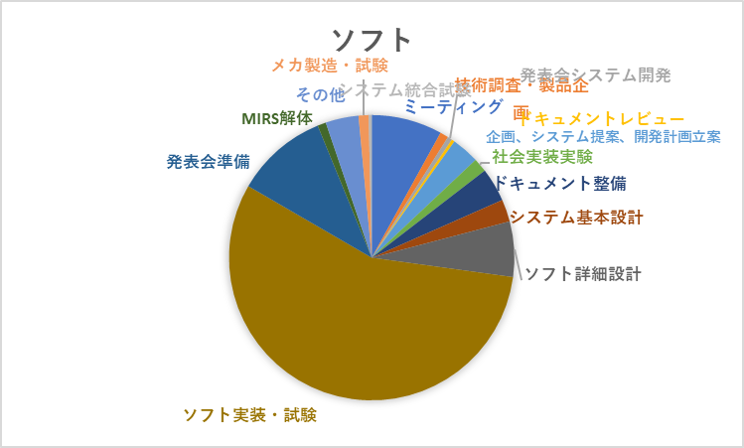
開発スケジュール(最終)班員、及び各パートの作業時間の割合を以下に示す。
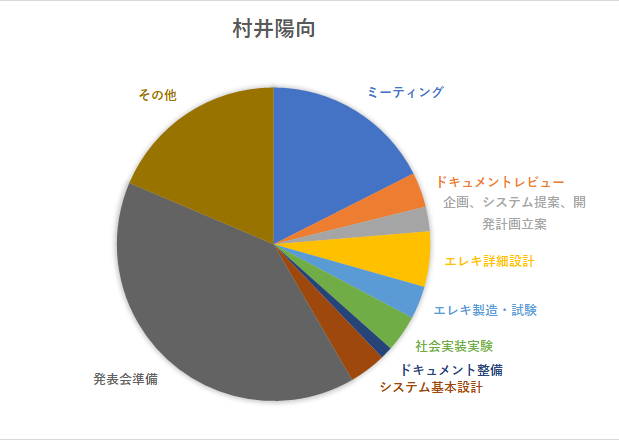
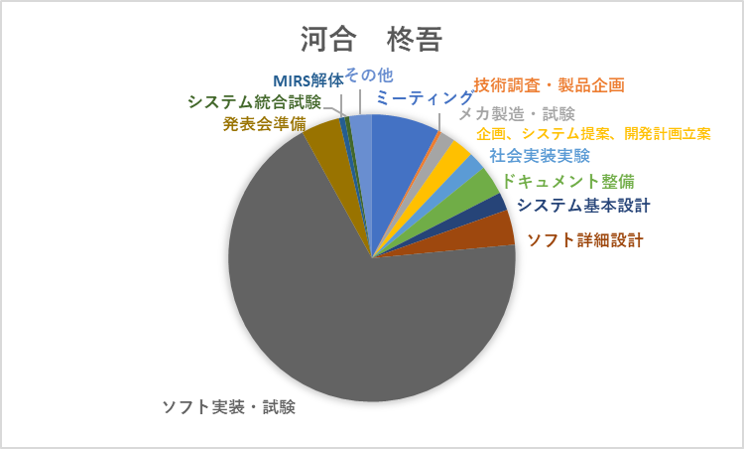

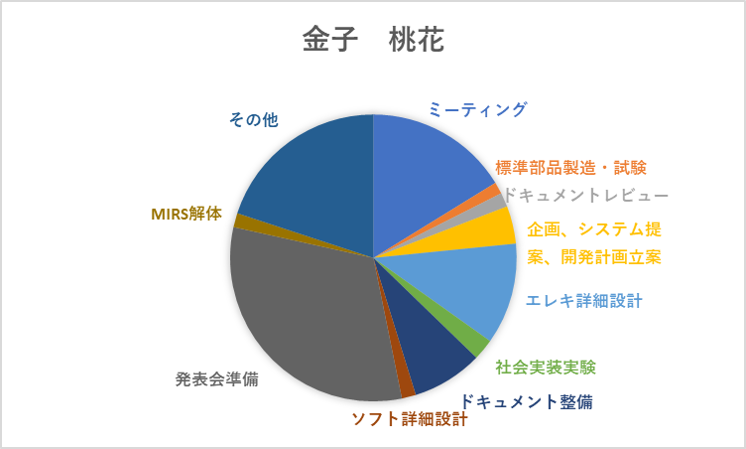
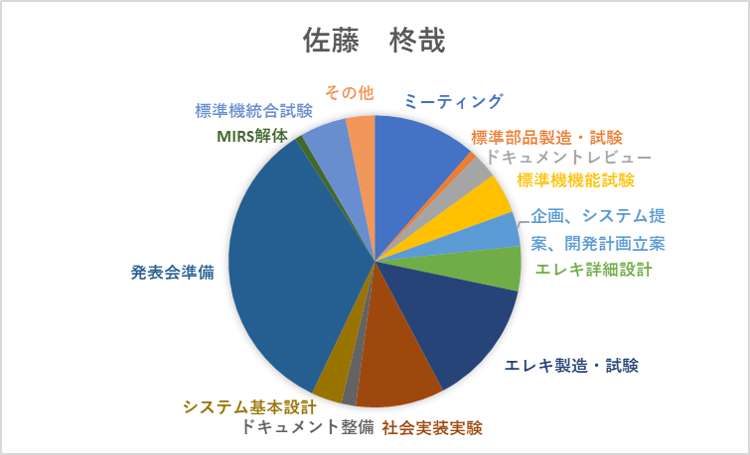
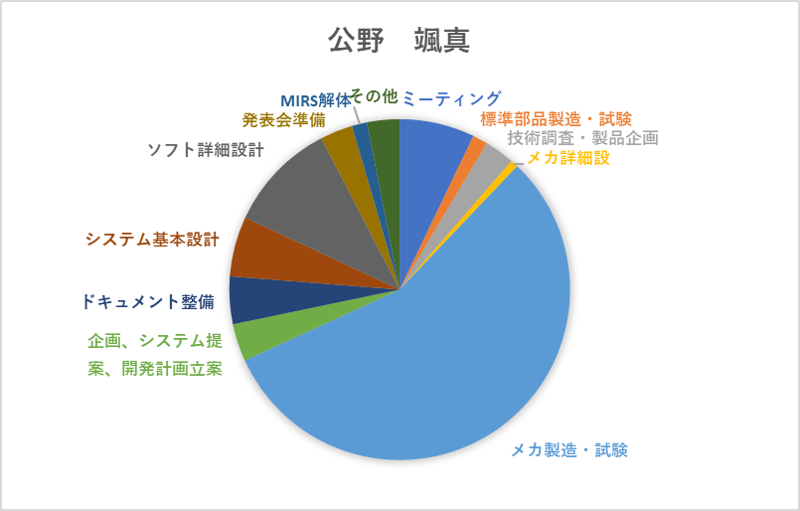


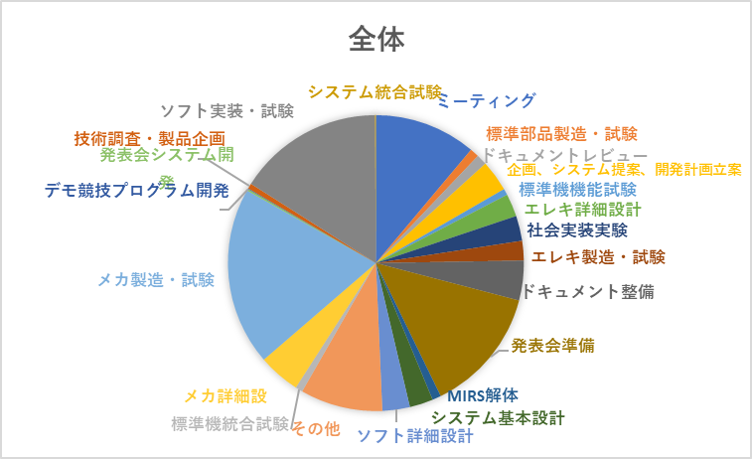
進捗は全体的に計画よりも遅れてしまった。これはカメラの昇降機能やWebアップロード機能のアイディア出しや技術調査に重きを置いていたからだと考える。また外装が2023年内に届かないというアクシデントもあり、思うように作業ができなかったことも要因だと考える。そのため進捗は全体的に計画よりも遅れてしまった。
こまめに進捗確認をしていたが予想よりも設計に時間がかかってしまった。しかし、時間をかけて設計できた部分は実装することができた。
社会実装計画書のリンクを下記に示す。
PuNIT社会実装計画書社会実装報告書のリンクを下記に示す。
PuNIT社会実装報告書MIRS2303の班員の所感を以下に示す。
1年間かけて制作したロボットが実際に学校内で社会実装できてよかったです。私は、技術面より資料・広報面で働きました。多くの人にPuNITを知ってもらえてよかったです。デモ試験や発表会、社会実装実験など多くの場面で資料を作成しました。この一年間で、資料作成や発表の技能が高まったと思います。PMとしては班員の仕事の割り振りに気をつけて指示を出すことができていたと思います。ただ、僕の資料作成含め一つの仕事に対して一人を割り振ることが多くそこは反省すべき点だったと思います。
この1年間本気でロボット製作を行うことができました。LiDARによる走行や顔認証など全く知らなかった技術を調べ挑戦できたことはとても良い経験になりました。ただ見通しが甘く実装までいかなかった部分もあり、全体を見通し計画を立てることの重要性も学べました。そして最後まで頑張るみんなの姿を見て、自分も最後まで走り切ることができました。
始まったときは自分たちにできるのかなという不安とても大きかったですが、周りの人にたくさん助けてもらったおかげで無事に完成させることができました。みんなに感謝!
高専4年目で一年間かけてやっていくMIRSをこのメンバーでできてよかったと思っています。ここまで素敵なロボットを作り上げてくれた班員のみんなに感謝しています。MIRS自体は終わってしまいますがチームで何かを作り上げる感動を忘れずに過ごしていきたいです。
丸一年間かけて何かを開発するのは初めての経験で、メンバーと協力しあって形あるものにできて本当に良かったです。突然動かなくなったりと、トラブルも多かったですがその対処の仕方やblender、Aviutlなどたくさんの経験を積むこともできました。
はじめはできないことも多かったけど、時間がたつにつれ様々な作業ができるようになりよかった。実際に動くところを見れてうれしかった。
blenderを初めて触るときに不安だったけどきちんと自分のものに出来たし、PVの制作にも役に立てたのでよかったです。外装で手一杯だった時もPuNITの魅力が伝わる発表会の準備やPV、実際に動かすための調整など皆でやれることを全力で最後まで行きつけたのがうれしいのと、その努力が評価にも表れているのがとても嬉しいです。
ソリッドワークスを使ったことは過去にもありましたが、他の人と一緒に一つの機体を作り上げる経験が少なく最初は不安でしたが、いろんな人と相談しながらうまく形にできてよかったです。結果としてメカの出来は自分にとって不足のない出来になってとても安心しています。やりがいが大きくとても豊かな授業になりました。