| 名称 |
MIRS2303 メカニクス開発報告書 |
| 番号 |
MIRS2303-MECH-0007 |
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2024.02.15 |
渡邉巧真 公野颯真 肥田友希 |
|
初版 |
目次
本ドキュメントは、MIRS2303におけるメカニクス開発報告書である。
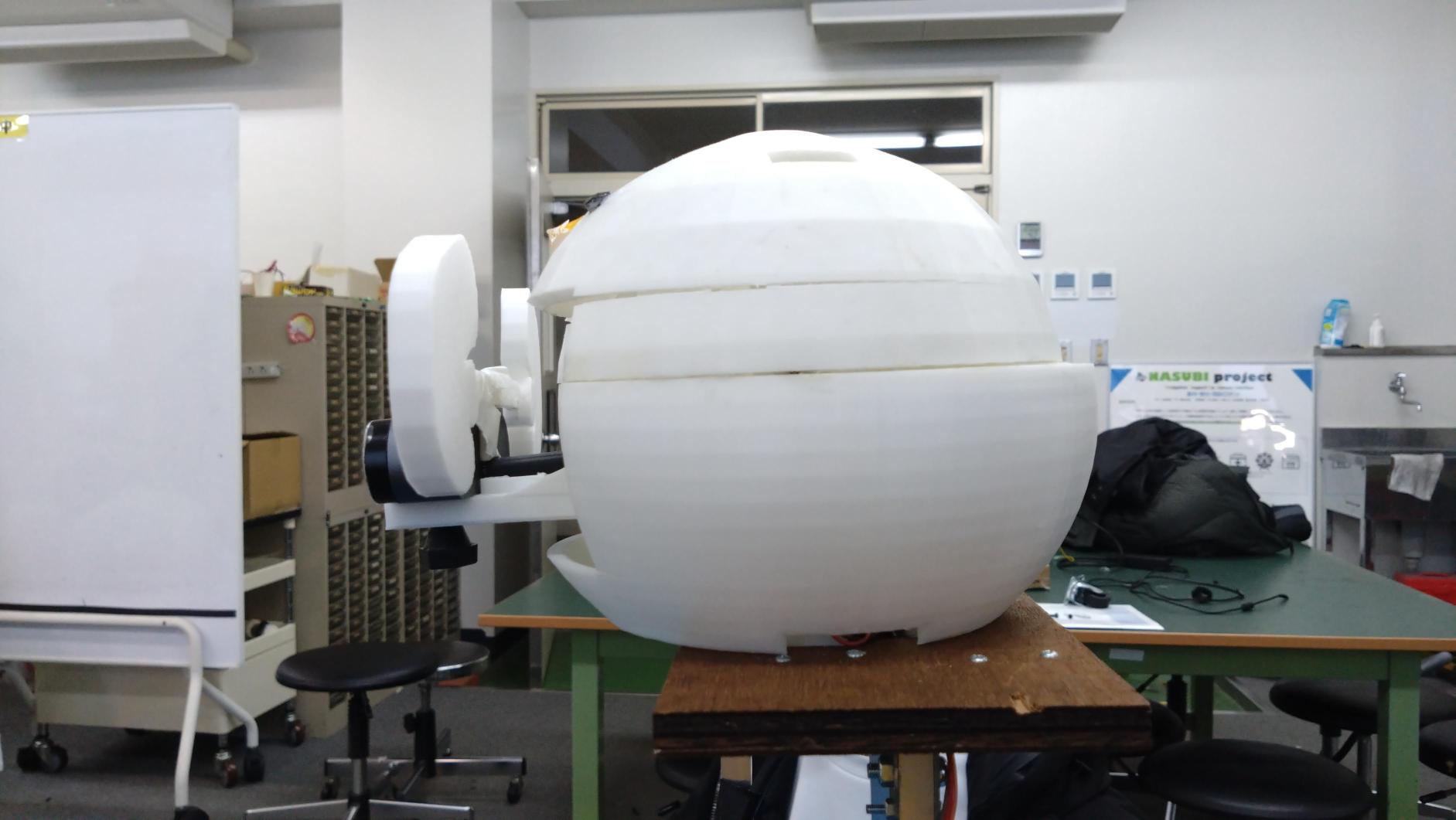
以下にPuNITの写真を示す。
製作物を以下の表に示す。
表1.製作・加工物
以下に各部の写真及び評価、特記事項を示す。
当初はモーターの回転の向きをかさ歯車で変えてボルトを回転させようとしていた
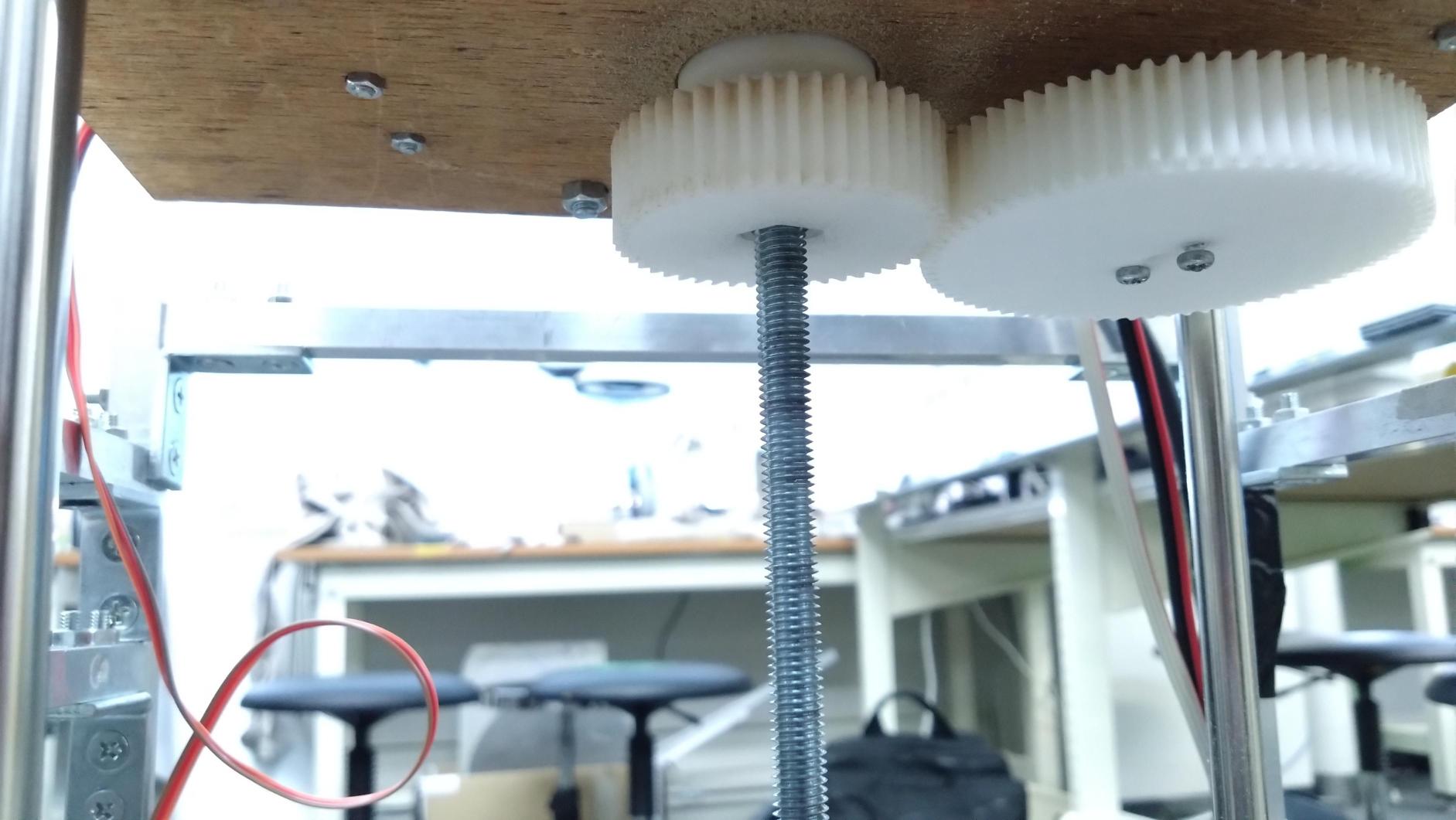 fig 6 昇降機構
fig 6 昇降機構
表2.昇降機構の詳細
| 機能詳細 |
昇降板に垂直に取り付けたDCモータの回転をギアで伝えてボルトに取り付けたナットを回して昇降した。 |
| 解決した問題点 |
昇降に時間がかかる |
| 問題の解決策 |
ギアの歯数を変更して回転量を増やした |
| 未解決の問題点 |
昇降の際に大きな音が発生する |
 fig 7 布外装羽閉じ
fig 7 布外装羽閉じ
 fig 8 布外装羽開き
fig 8 布外装羽開き
 fig 9 プラダン外装
fig 9 プラダン外装
表3.外装
| 外装詳細 |
親しみやすいキャラクターをイメージしたふわふわな青い鳥を模した外装を製作した。 |
| 解決した問題点 |
顔のパーツが落ちる |
| 問題の解決策 |
顔のパーツを糸で縫い付ける
|
| 未解決の問題点 |
変に力が加わり、糸がほつれた部分があった |
 fig 10 支柱全様
fig 10 支柱全様
表4.全体の支え
| 機能詳細 |
高い部分に板を設置するため支柱を設置した。 |
| 解決した問題点 |
L字材がうまく取り付けられなかった |
| 問題の解決策 |
誤発注しており、発注しなおした |
| 未解決の問題点 |
なし |
 fig 11 リミットスイッチの取り付け
fig 11 リミットスイッチの取り付け
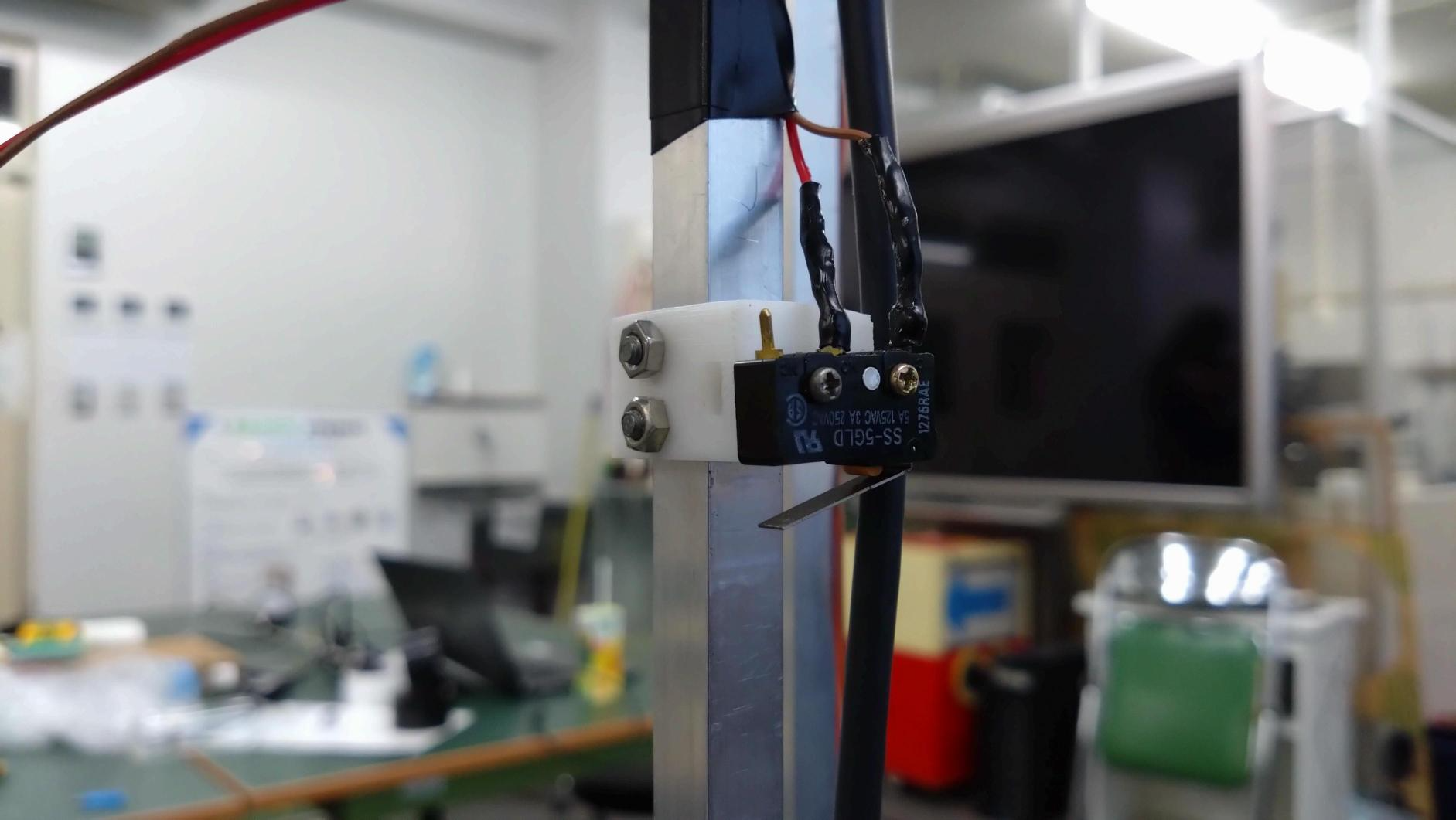 fig 12 リミットスイッチ
fig 12 リミットスイッチ
表5.リミットスイッチにおける単体試験詳細
| 機能詳細 |
昇降上限と昇降下限を儲けたいため昇降する柱にリミットスイッチを取り付けスイッチが押されたら昇降を止めるようにして破壊を防いだ |
| 解決された問題点 |
特になし |
| 問題の解決策 |
特になし |
| 未解決の問題点 |
特になし |
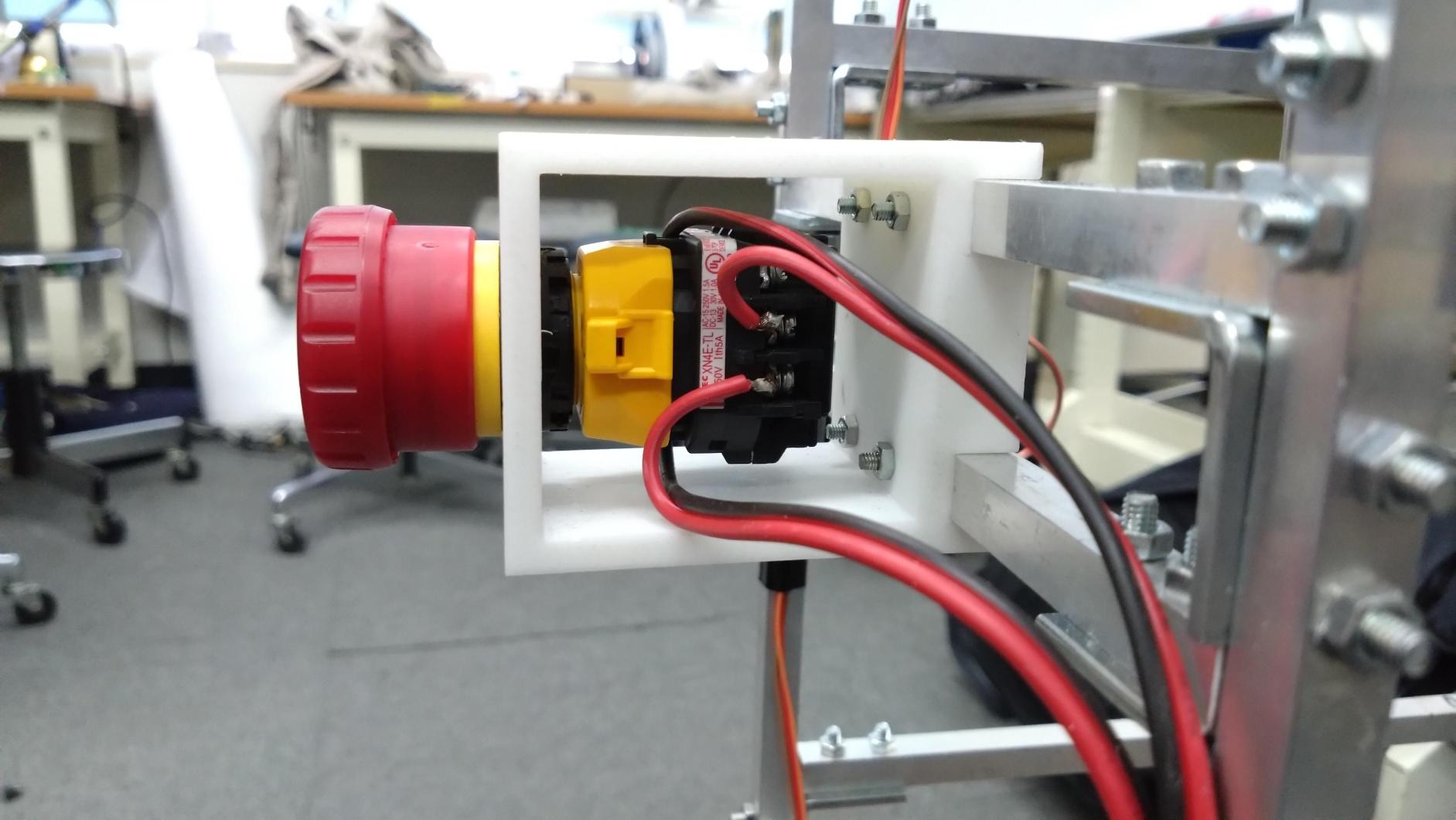 fig 13 取り付けられた緊急停止ボタン
fig 13 取り付けられた緊急停止ボタン
表6.緊急停止用スイッチ
| 機能詳細 |
ロボットの挙動に問題が発生した際にすぐに動きを止めるために電源からボタンを通してモータにつなげるようにした |
| 解決した問題点 |
取り付ける場所がなく、外装の外に出ていなかった |
| 問題の解決策 |
支柱に取り付けることにした。また、緊急停止ボタンを取り付けるためのマウントをスペーサーとしても活用して外装から出るようにした
|
| 未解決の問題点 |
特になし |
 fig 14 カメラ角度調整機構
fig 14 カメラ角度調整機構
表7.カメラ角度調整機構
| 機能詳細 |
サーボモータを用いて上下左右に角度調整をする |
| 解決した問題点 |
モータに加わるトルクが大きく角度調整をした際に途中で空転して中のギアが壊れてしまう |
| 問題の解決策 |
カメラの反対方向にカウンターウェイトとなるボルトとナットを取り付けてモータの負担を減らした
|
| 未解決の問題点 |
左右の角度調整が安定せず、機構の取り付けを断念した |
以下にメカのガントチャートを示す。
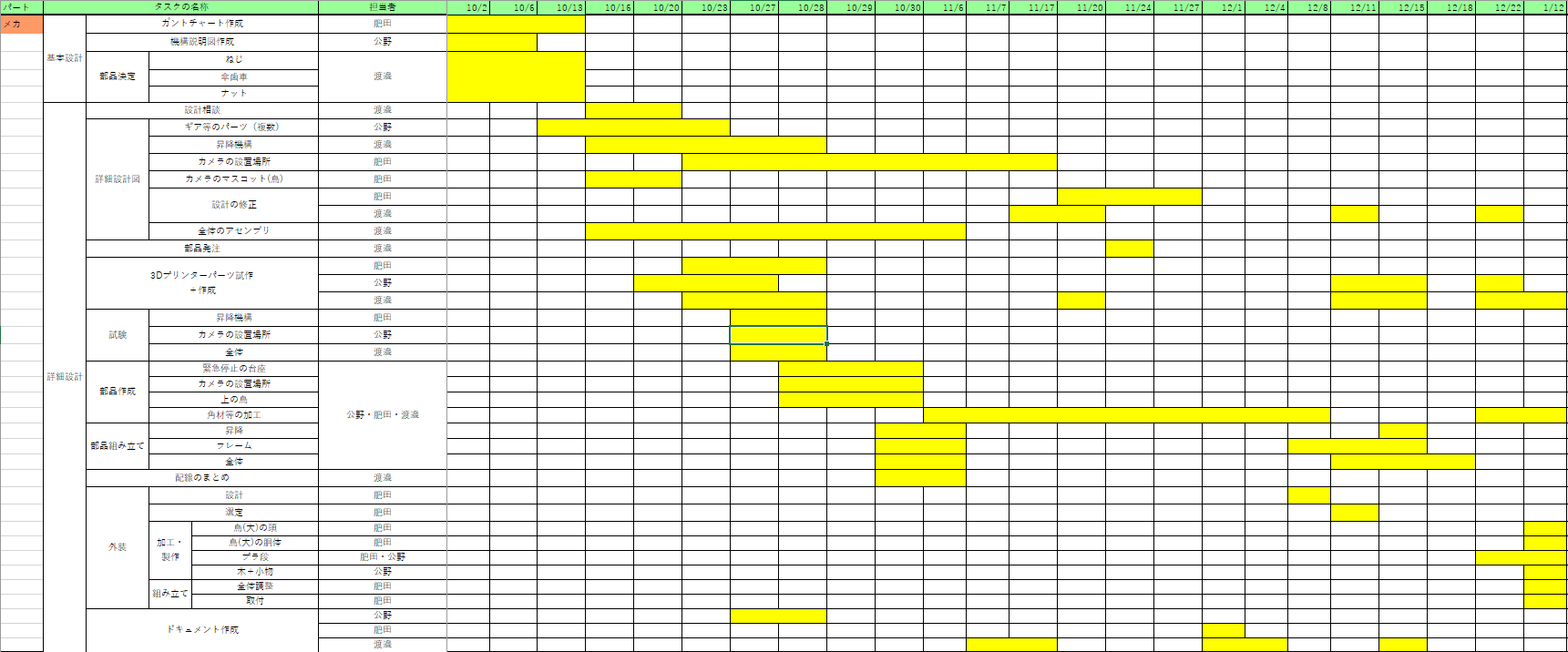 fig 15 メカのガントチャート
fig 15 メカのガントチャート
以下にメカ担当者の作業割合を示す。
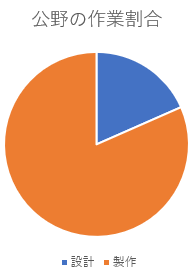 fig 16 公野の作業割合
fig 16 公野の作業割合
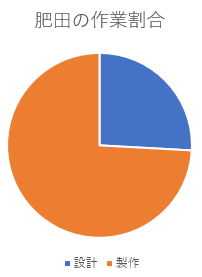 fig 17 肥田の作業割合
fig 17 肥田の作業割合
 fig 18 渡邉の作業割合
fig 18 渡邉の作業割合
 fig 19 メカ全体の作業割合
MIRS2303 開発完了報告書
fig 19 メカ全体の作業割合
MIRS2303 開発完了報告書
MIRS2303 開発報告書(エレクトロニクス)
MIRS2303 開発報告書(ソフトウェア)
MIRS2202ドキュメント管理台帳へ戻る