
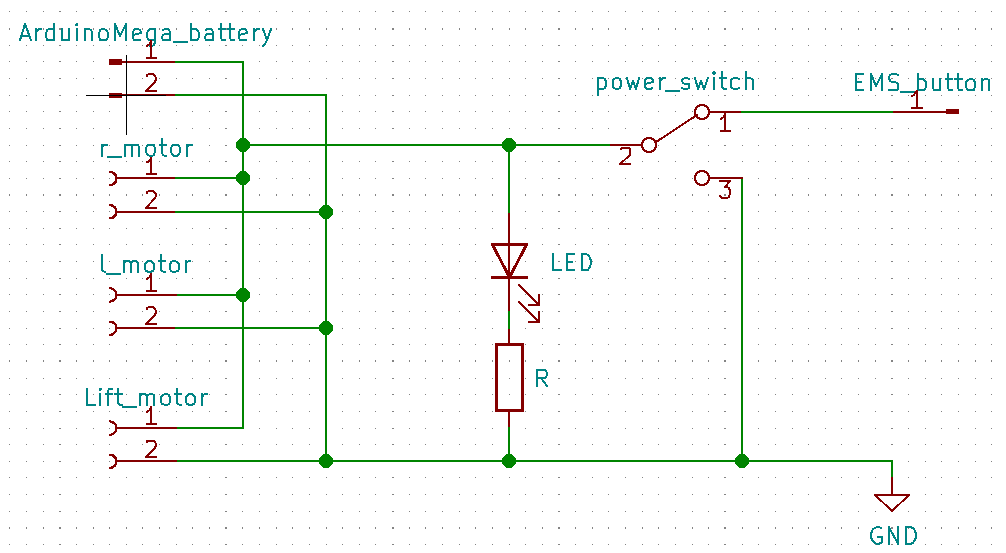
fig1.電源ボード回路図
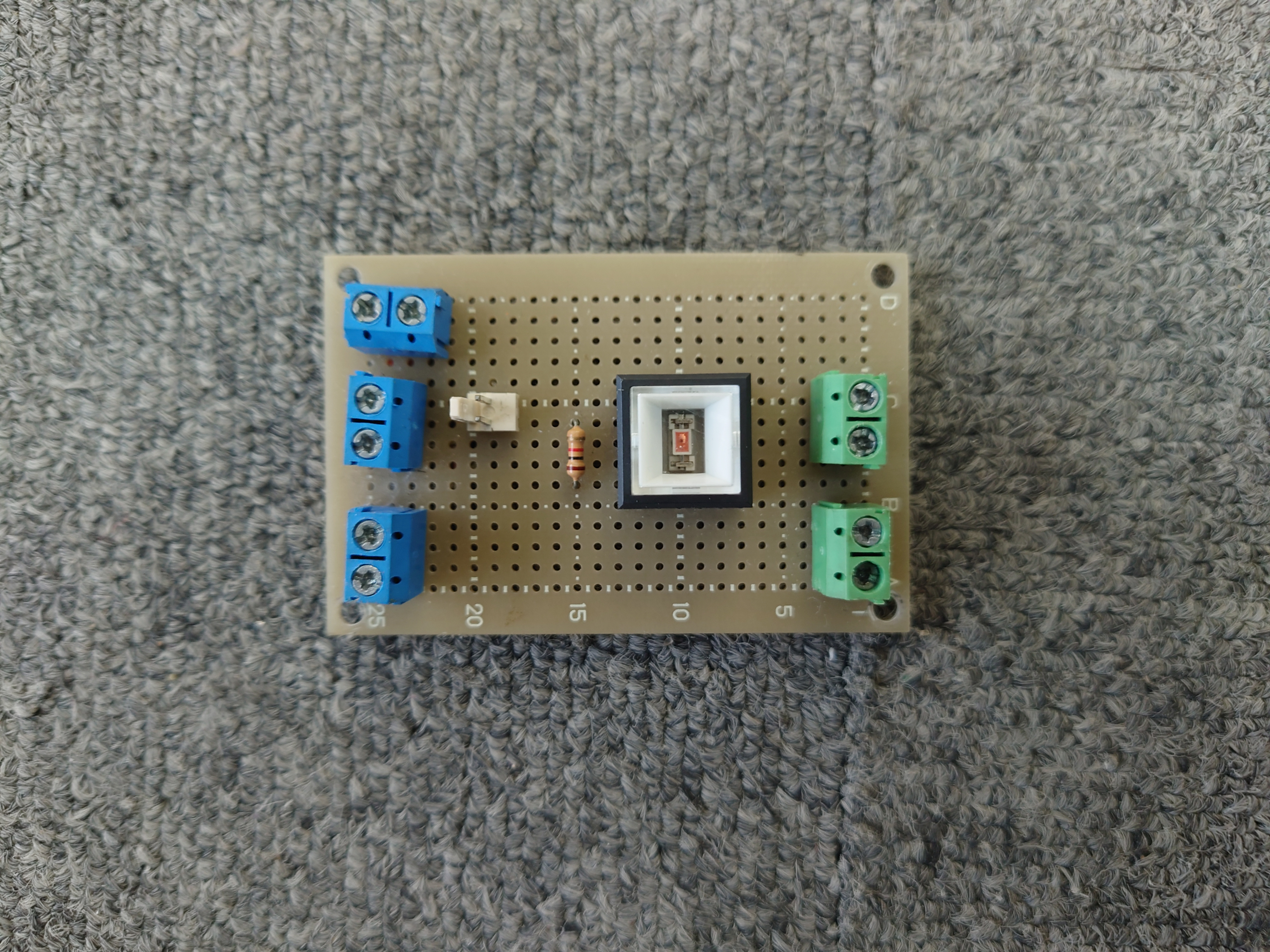
fig2.電源ボード表

fig3.電源ボード裏
以下に単体試験結果を示す。
表3.電源ボード 単体試験結果
| 試験内容 | テスターで導通チェックし、電圧が正しく供給されているのか確認する |
|---|---|
| 試験結果 | デバイスごとに適切な電源供給がなされていた |
| 合否判定 | 合格 |
5.ArduinoMegaシールド基板
Arduino Megaシールド基板の回路図、及び写真をfig4、fig5、fig6に示す。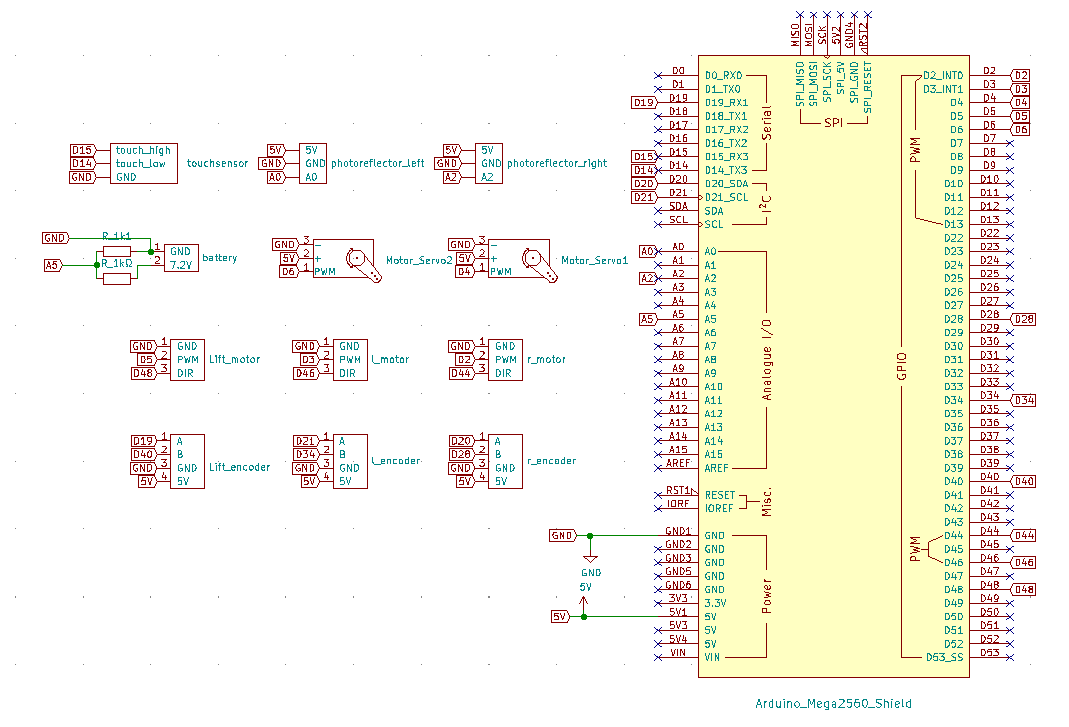
fig4.Arduino Megaシールド基板回路図
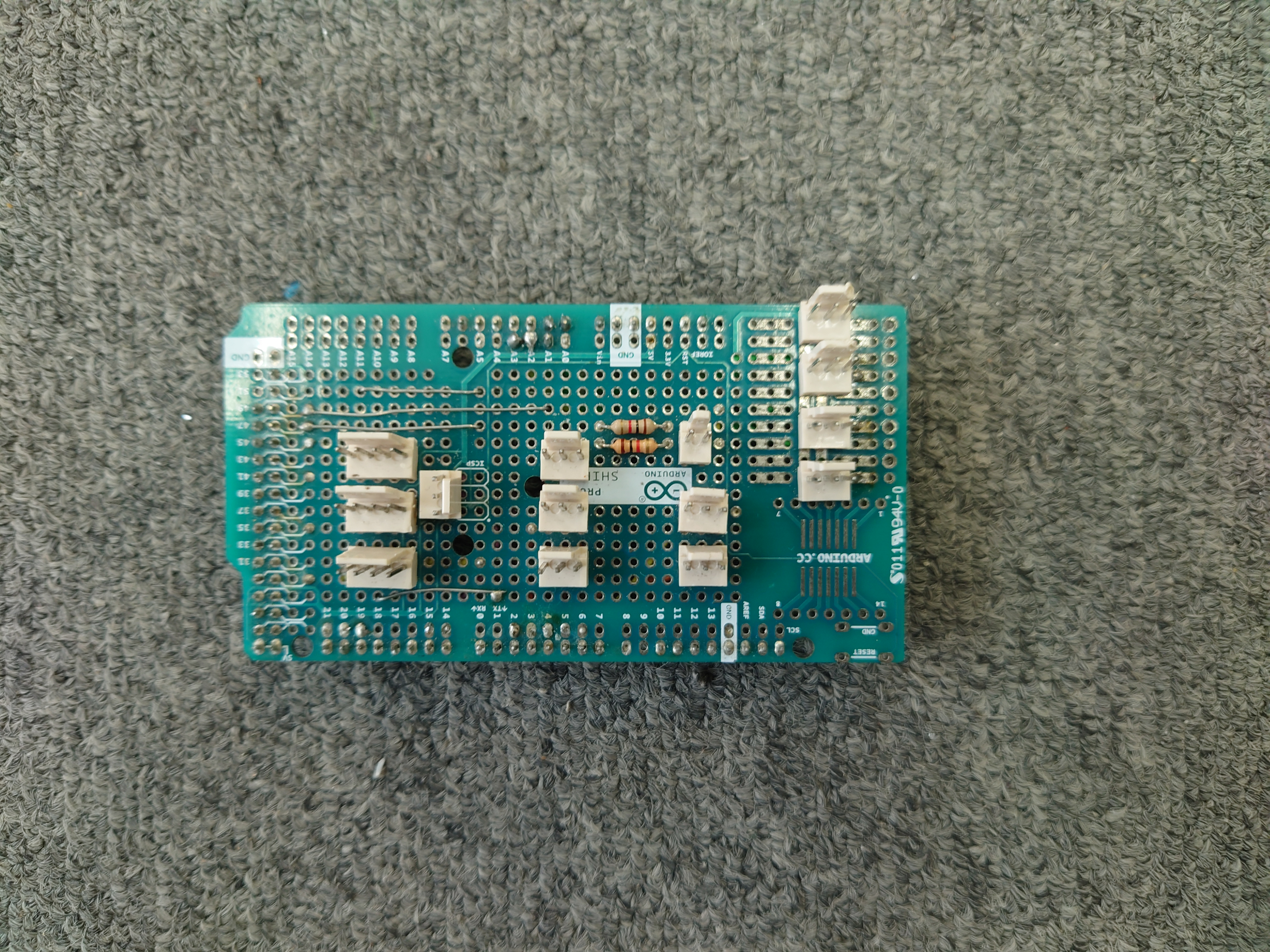
fig5.Arduino Megaシールド基板表
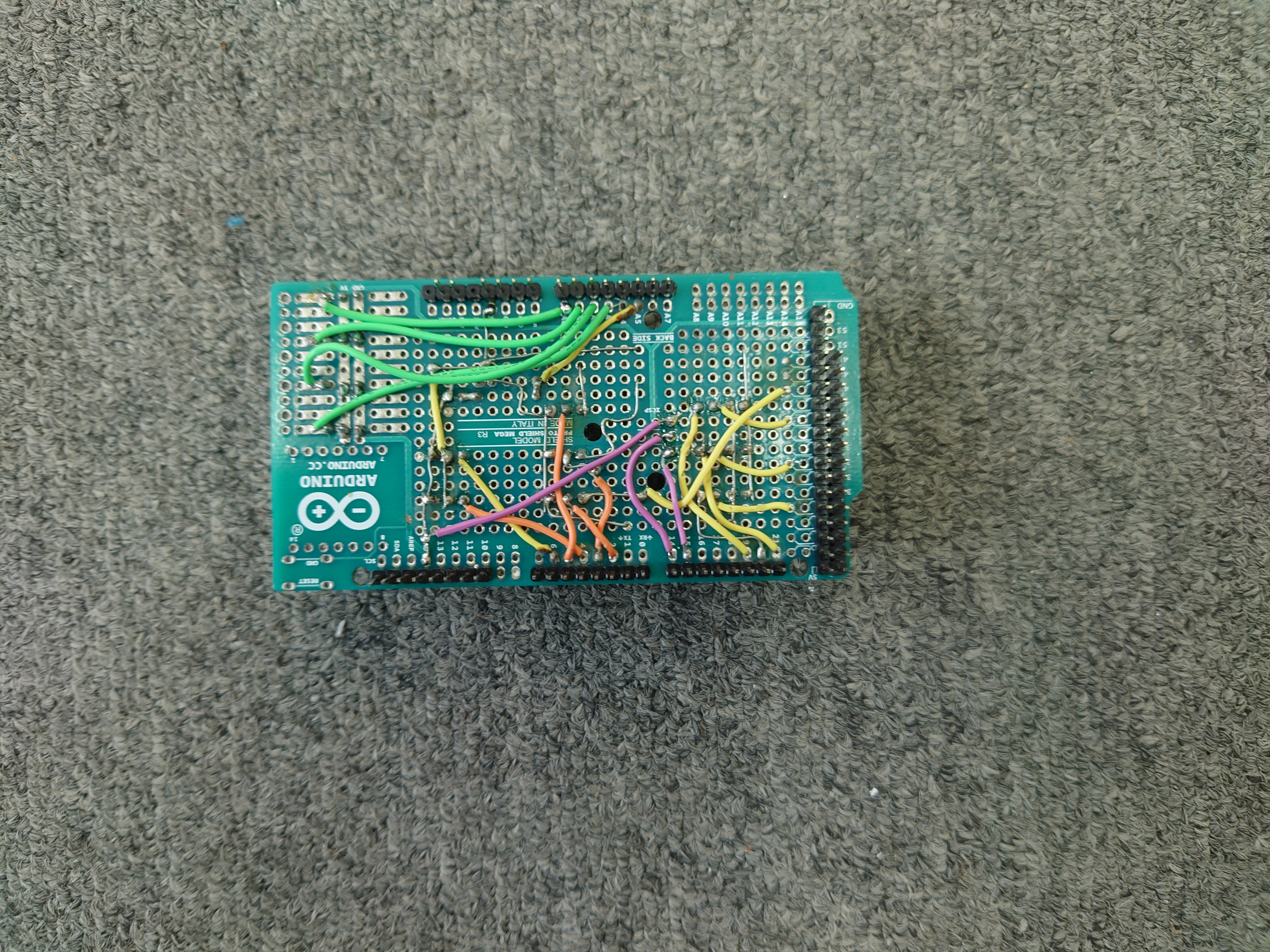
fig6.Arduino Megaシールド基板裏
・フォトリフレクタ用ピンを4つ追加(実際に使用したのはA0、A2の2つ)
・昇降モータの位置検出用にタッチセンサ用ピンを追加
以下に単体試験結果を示す。
表4.ArduinoMegaシールド基板 単体試験結果
| 試験内容 | はんだ付けした回路をテスターで導通チェックし、5Vの電圧が供給されているのを確認する |
|---|---|
| 合格基準 | 5Vが安定してかかっているか確認する |
| 試験結果 | 接続された各デバイスに必要な信号が送られていた |
| 合否判定 | 合格 |
5.Raspberry Piシールド基板
Raspberry Piシールド基板の回路図、及び写真をfig7、fig8、fig9に示す。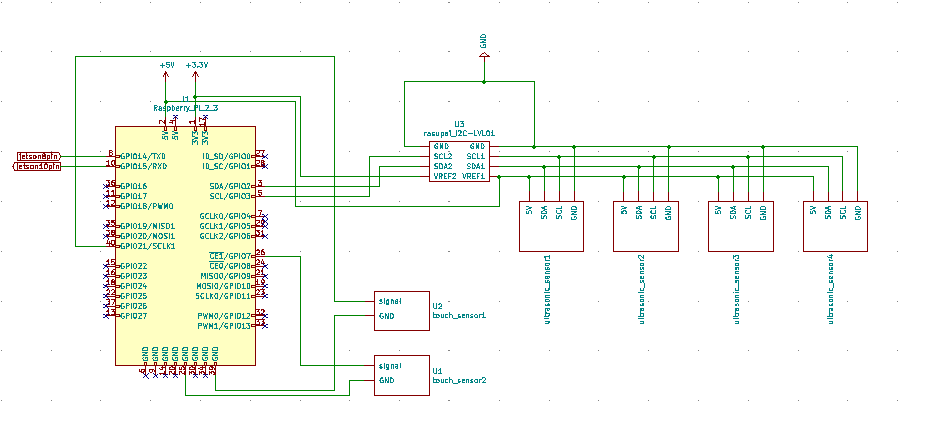
fig7.Raspberry Piシールド基板回路図

fig8.Raspberry Piシールド基板表

fig9.Raspberry Piシールド基板裏
表5.Raspberry Piシールド基板における単体試験詳細
| 試験内容 | はんだ付けした回路をテスターで導通チェックし、衝突検知用タッチセンサが正しく動作するかを確認する |
|---|---|
| 合格基準 | シリアルモニタでタッチセンサが正しく動作しているか |
| 試験結果 | GPIO7のタッチセンサピンは正しく動作したが、GPIO21のタッチセンサは反応がなかった。原因はGPIO21ピンがプルアップ指定のできないピンだからだと考えられる。
参照:Raspberry PiのGPIOのプルアップについて |
| 合否判定 | 合格(衝突検知用タッチセンサは1つのみだったため合格とした) |
6.タッチセンサ基板
このタッチセンサ基板は、機体上部と機体下部に1個ずつ設置したタッチセンサ2つとArduino Mega基板との中継基板である。タッチセンサ基板の回路図、及び写真をfig10、fig11に示す。

fig10.タッチセンサ基板回路図

fig11.タッチセンサ基板
表6.タッチセンサ接続
| タッチセンサ名 | 用途 | 接続先信号ピン番号 |
|---|---|---|
| touch_high | カメラの昇降の上の限界を検知 | 15ピン |
| touch_low | カメラの昇降の下の限界を検知 | 14ピン |
表7.タッチセンサにおける単体試験詳細
| 試験内容 | 導通チェックを行い、IDEにて出力を確認する |
|---|---|
| 合格基準 | 正しく出力がなされているかどうか |
| 試験結果 | 正しく動作をしていた |
| 合否判定 | 合格 |
7.緊急停止用スイッチ
緊急停止用スイッチの回路図、及び写真をfig12、fig13に示す。
fig12.緊急停止用スイッチ回路図

fig13.緊急停止用スイッチ
表8.緊急停止用スイッチにおける単体試験詳細
| 試験内容 | テスターで導通チェックを行い、走行プログラム中に緊急停止ボタンを押す |
|---|---|
| 合格基準 | スイッチオフ時に適切な電圧が供給されているか、オン時に正しい動作をしているか |
| 試験結果 | オフ時にはバッテリー電圧と同等の電圧が供給されていた。スイッチをオンにすると走行が停止した。再びスイッチをオフに戻しても停止したままだったことから、プログラムも緊急停止時に止まっていたと考えられる。 |
| 合否判定 | 合格 |
8.フォトリフレクタ
フォトリフレクタの回路図、及び写真をfig14、fig15、fig16に示す。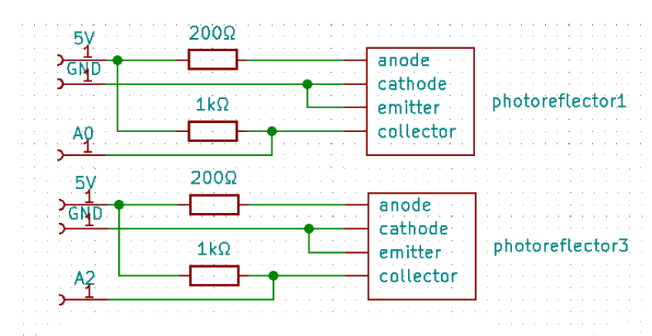
fig14.フォトリフレクタ回路図
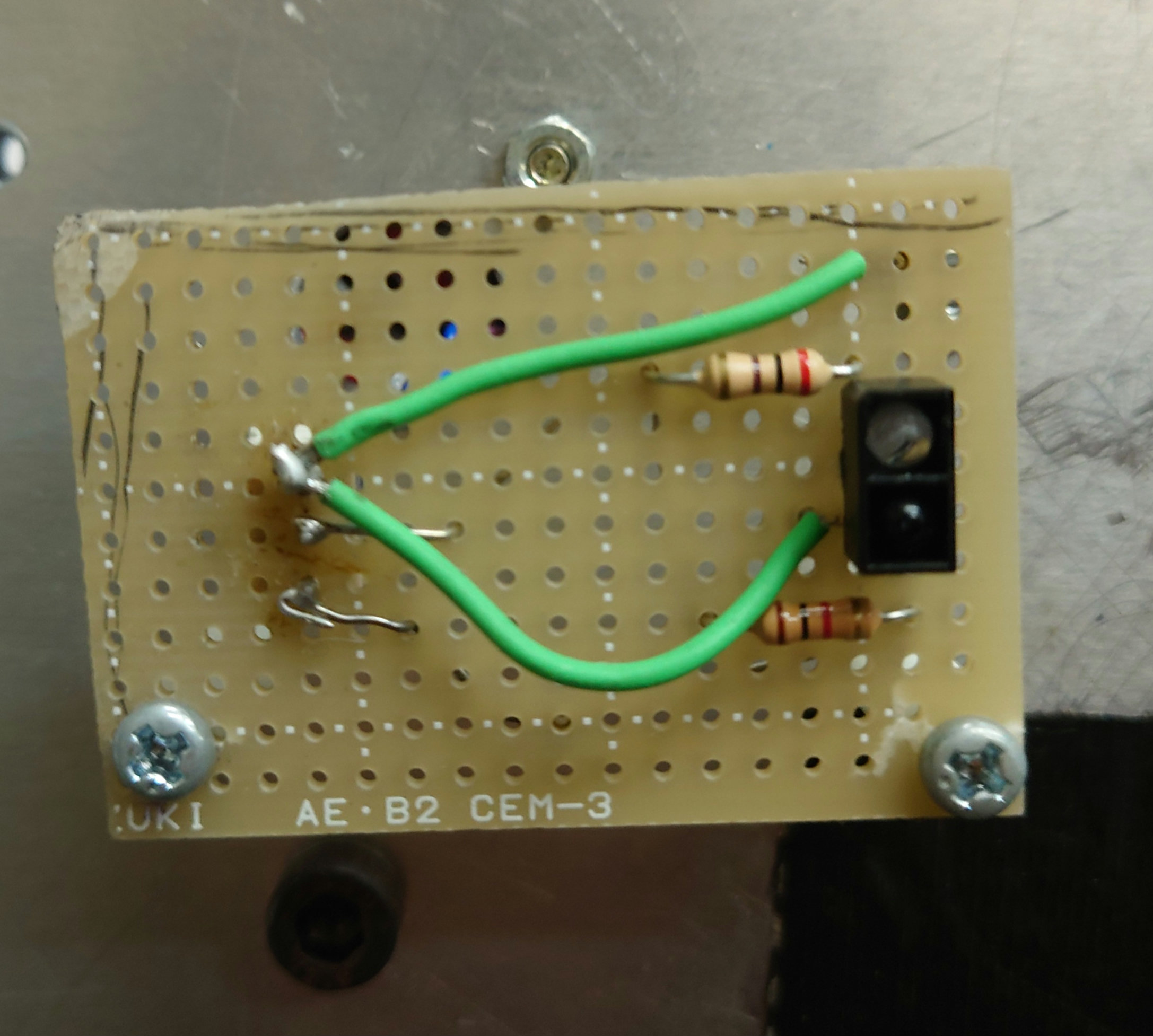
fig15.左フォトリフレクタ
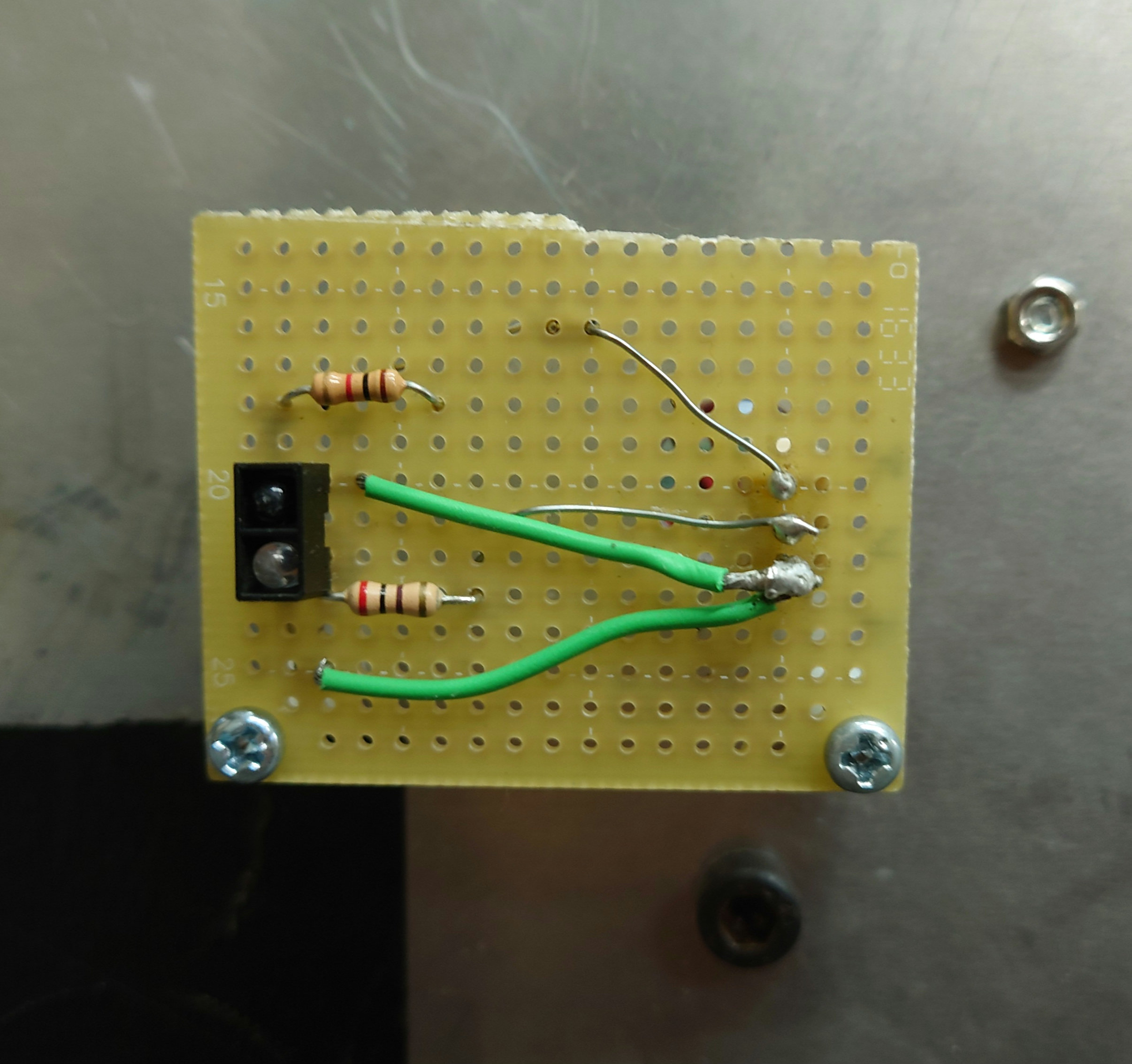
fig16.右フォトリフレクタ
表9.フォトリフレクタ接続
| フォトリフレクタ名 | 信号ピン接続先 |
|---|---|
| photoreflector_left | A0 |
| photoreflector_right | A2 |
表10.フォトリフレクタにおける単体試験詳細
| 試験内容 | テスターで導通チェックを行い、Arduino Megaに繋いでフォトリフレクタを一定の高さから白と黒のラインを読み取り、出力を確認する |
|---|---|
| 合格基準 | 白と黒のラインで値が変化するか |
| 試験結果 | 左右のフォトリフレクタの値の誤差が白と黒ラインの両方で10以内であり、正しく動作している |
| 合否判定 | 合格 |
9.総括
エレキは概ねスムーズに作業を進めることができた。当初は標準機のArduino UNOを使う予定だったが、先代のMEMOLIPのArduino Megaで実装することになり、作業短縮につながり、より社会実装実験に向けて準備する時間ができた。
その結果、エレキの作業と並行して発表会や社会実装実験の準備をすることができた。しかし作業が減った半面、Arduino Megaに実装したことでエンコーダが取れなくなるという問題が起き、デバック作業にも追われてしまった。
(結果、原因はプログラムにあった。) LiDAR走行の進捗を鑑みて12月半ばに急遽ライントレースの実装が必要になった。そのため急遽フォトリフレクタの基板を作成することになり、詳細設計もすることができなかった。
1年間の企画から社会実装試験までのを通してもっとも大切だと感じたことは、設計していく中での仕様変更の決断は大切だということである。
今回、社会実装実験に向けて企画当初はLiDAR走行を推していた。チャレンジしたいという願望があったからである。しかし作業が進むなかで、LiDAR走行機能開発の進捗が芳しくなかった。そこで本当に社会実装実験ではLiDAR走行をするべきなのか、ライントレースに舵を切ったほうがいいのではないかという話し合いが行われた。
12月に行われたデモ試験では、ライントレース走行を用いた。LiDAR走行も準備していたが精度的にエラーが発生する状態だった。この段階で完全にライントレース走行に舵を切る決断をできた。実際に、撮影場所の教室内でLiDAR走行をできるほどのスペースはなかったため、ライントレース走行で十分だった(結果オーライ)。
このことから、実際に動作している姿からイメージしながら逆算して必要な機能(撮影機能)とグレードを落としていい機能(走行機能)を仕分ける大切だということが分かった。チャレンジしたいという思いのもと、LiDAR走行にチャレンジしていたため悔いはないが、決断するまでに時間がかかってしまった。実装するための「壁」を感じる一年間だった。
10.各パートのリンク
MIRS2303 開発完了報告書
MIRS2303 開発完了報告書(メカニクス)
MIRS2303 開発完了報告書(ソフトウェア)
MIRS2303ドキュメント管理台帳へ戻る