| 名称 | MIRS2105エレキ詳細設計 |
|---|---|
| 番号 | MIRS2105-ELEC-0001 | 現在時刻 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| B02 | 2021.2.7 | 植田 花、タン フイ スエン | 大沼先生 | 第3版 |
目次
1.はじめに2.担当メンバー
3.使用部品
4.基本接続図
5.電源ボードの構成
6.RaspberryPiの構成
7.Arduinoの構成
8.使用物品
9.各パートへのリンク
1.ドキュメント概要
本ドキュメントはPhotoKENプロジェクトに関するエレクトロニクス詳細設計についてまとめたものである。
2.担当メンバー
MIRS2105のエレクトロニクス担当メンバーを以下に示す。
植田、タン
3.使用部品
標準機から変更のある部品をtable1に示す。
table1 変更部品
| 部品名 | 使用用途 | 個数 | 変更・追加 |
|---|---|---|---|
| 電源ボード | 電源の供給 | 1 | 緊急停止スイッチを接続する回路の追加 |
| 緊急停止用スイッチ | 緊急停止をする | 1 | 追加 |
| RaspberryPiシールド基板 | RaspberryPiの配線のサポート | 1 | 緊急停止スイッチ、超音波センサ、タッチセンサ、タッチディスプレイの接続先追加 |
| Arduinoシールド基板 | Arduinoの配線のサポート | 1 | DCモータの接続先追加 |
4.基本接続図
figure1に基本接続図を示す。

figure1 基本接続図
※緊急停止スイッチは駆動用バッテリからの出力を切断し、モータの動作を停止させることで実現する。
5.電源ボードの構成
電源ボードの構成をfigure2に示す。
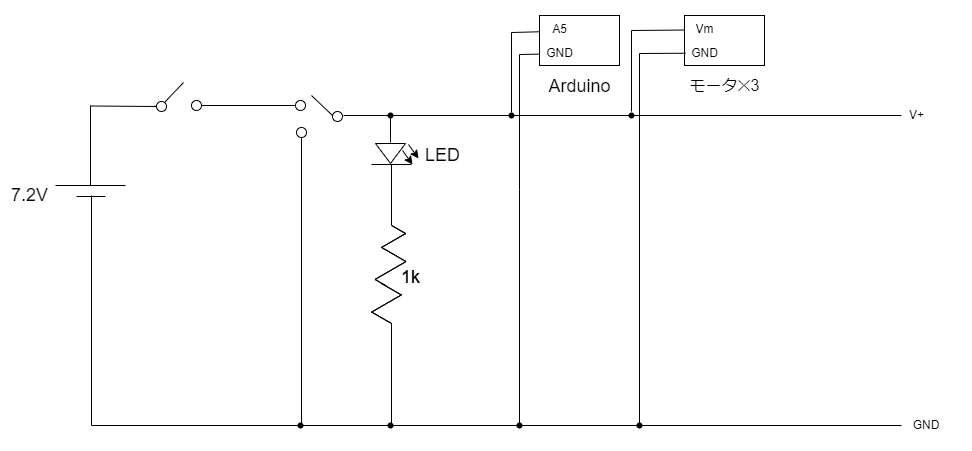
figure2 電源ボードの構成図
電圧監視のためArduinoを接続している。ArduinoのA5ピンの最大入力電圧は5Vであるので、Arduinoシールド上で1kΩの抵抗を用いて分圧することで、バッテリ電圧の1/2の電圧を入力する。 図では明瞭にするため、省略した。
6.RaspberryPiの構成
RaspberryPiの構成をfigure3に示す。

figure3 RaspberryPiの構成図
次にRaspberryPiのピン番号をtable2にまとめて示す。
table2 RaspberryPiピン番号
| ピン番号 | 接続デバイス | IN/OUT |
|---|---|---|
| GPIO2 | I2Cレベル変換器(SDA) | OUT |
| GPIO3 | I2Cレベル変換器(SCL) | OUT |
| GPIO5 | タッチセンサ | IN |
| GPIO6 | タッチセンサ | IN |
| GPIO7 | タッチセンサ | IN |
| GPIO8 | タッチセンサ | IN |
| 5V | タッチディスプレイ | IN |
タッチセンサはプルアップピンであるGPIO5~GPIO8ピンに接続した。
7.Arduinoの構成
Arduinoの構成をfigure4に示す。
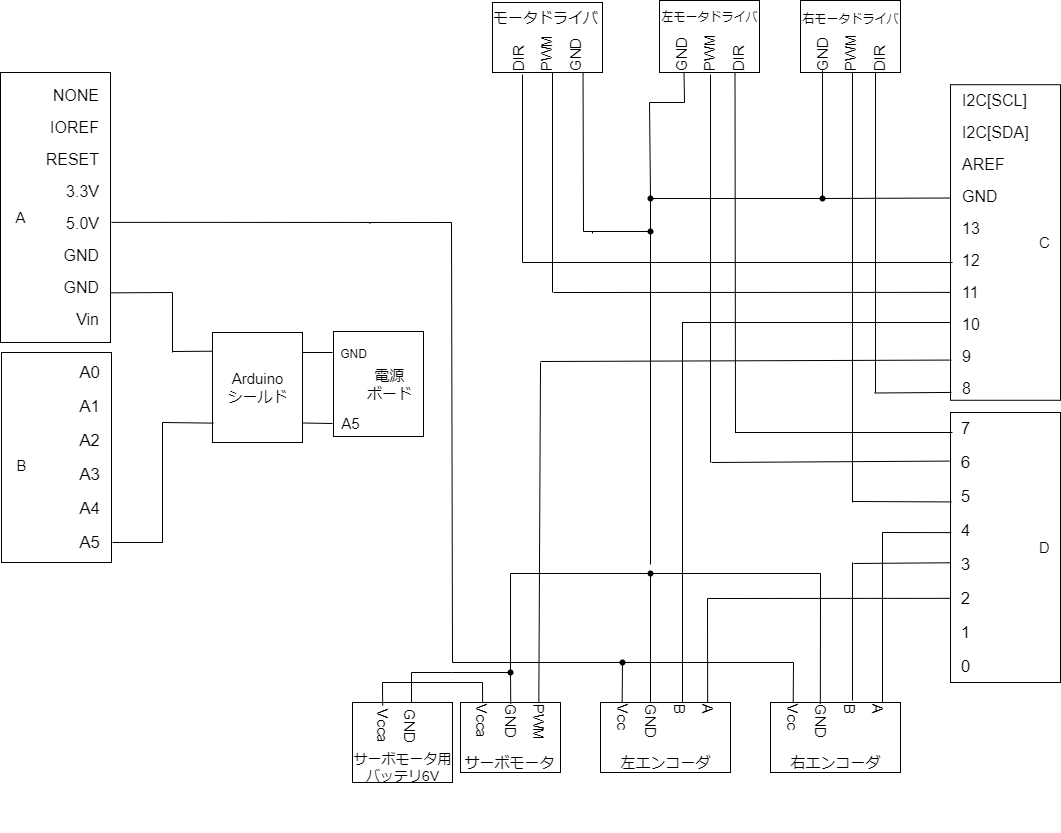
figure4 Arduinoの構成図
次にArduinoのピン番号をtable3にまとめて示す。
table3 Arduinoピン番号
| ピン番号 | 接続デバイス | IN/OUT |
|---|---|---|
| 9 | サーボモータ | OUT |
| 2 | 左エンコーダ(A層) | IN |
| 4 | 右エンコーダ(A層) | IN |
| 10 | 左エンコーダ(B層) | IN |
| 3 | 右エンコーダ(B層) | IN |
| 8 | 駆動右モータドライバ(DIR) | OUT |
| 5 | 駆動右モータドライバ(PWM) | OUT |
| 6 | 駆動左モータドライバ(PWM) | OUT |
| 7 | 駆動左モータドライバ(DIR) | OUT |
| 11 | 頭部回転モータドライバ(PWM) | OUT |
| 12 | 頭部回転モータドライバ(DIR) | OUT |
| A5 | 駆動用バッテリー電圧 | IN |
8.使用物品
標準機から追加して使用する物品をtable4に示す。
table4 使用物品一覧
| 名称 | 使用目的 | 型番 | 個数 |
|---|---|---|---|
| DCモータ | 頭部回転機構の駆動の為 | ジャンク品のためなし | 1個 |
| モータドライバ | DCモータの制御のため | ジャンク品のためなし | 1個 |
| タッチセンサ | 障害物衝突回避のため | ジャンク品のためなし | 2個 |
| 超音波センサー | 障害物回避のため | SRF02 | 1個 |
8.各パートへのリンク
各パートごとの基本設計のリンクを以下に示す
MIRS2105ドキュメント管理台帳へ