はじめに
本ドキュメントはMIRS1804 GYM員Projectのパトランプ詳細設計のドキュメントである。機能概要
このデバイスは、周囲の人に機体が走行していることを伝え、衝突を防止するための安全対策として用いる。製作
パトランプを導入する際、既製品のパトランプにRaspberryPiから電圧を印加することで作動させようとした。しかし、RaspberryPiのGPIOピンが流すことのできる電流は最大16[mA]であり、パトランプのモーターを制御するには電流が足りず、無理やり接続するとRaspberryPiが壊れてしまうおそれがある。そのため、FETを用いてパトランプのON/OFFの制御を行うことにする。今回用いるパトランプの仕様をTable.1、FETの仕様をTable.2として以下に示す。
| 型番 | CLV-502 |
| 定格電圧 | 4.5[V] |
| 定格電流 | 0.55[A] |
| 型番 | 2Sk971 |
| 動作電圧 | 3[V] (ドレイン電流=5[A]の時) |
| 最大電圧 | 60[V] |
| 最大電流 | 15[A](瞬間:60[A]) |
-
- 概要
- 基本的には既製品のパトランプを用い、これを改造してMIRSに導入する。
- 既製品のスイッチ部分をFETに替え、これに対してGPIOピンから3.3[V]を印加することでFETを動作させ、パトランプをONにするようにする。
- パトランプを駆動するための電源は単3電池3本(4.5[V])を用いる。
- RaspberryPiからの信号が出ていないときに誤作動しないようにするためにゲートソース間抵抗(大きさは10kΩを採用)を接続する。
-
- 回路図 作成するパトランプの回路図をFig.1中に示す(点線で囲まれた部分)。
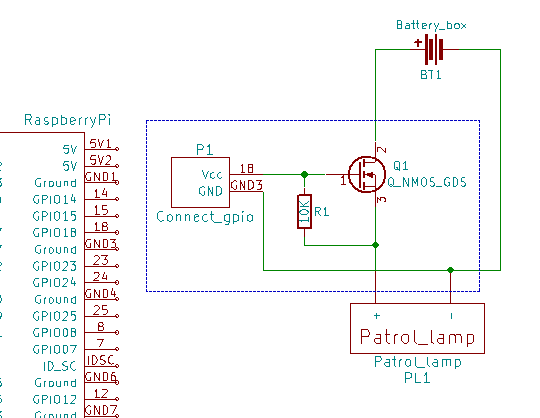
Fig.1 回路図
-
- 完成図 既製品のパトランプを改造する形をとったため、スペースの問題からも基板上には実装せず素子を半田でつなげるだけで実装した。その写真をFig.2,Fig.3として以下に示す。
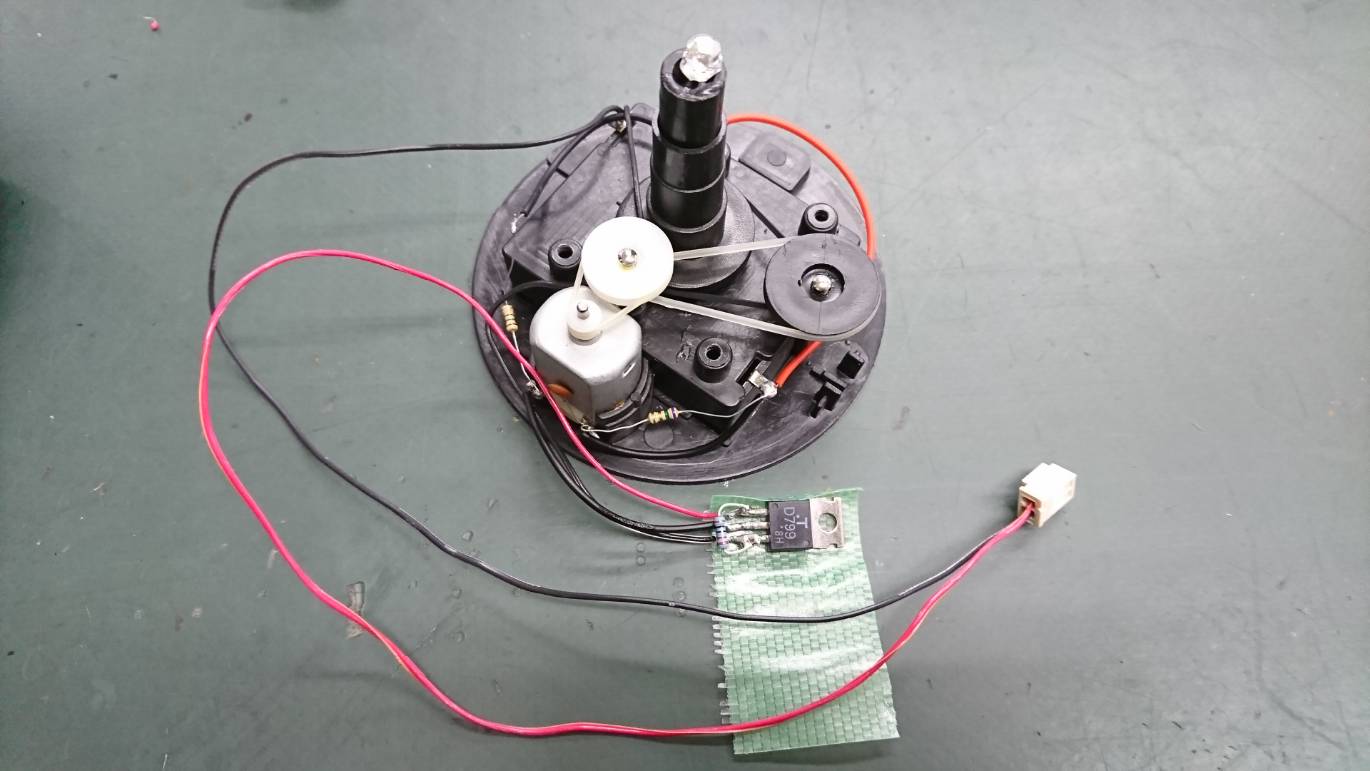
Fig.2 パトランプ完成図1
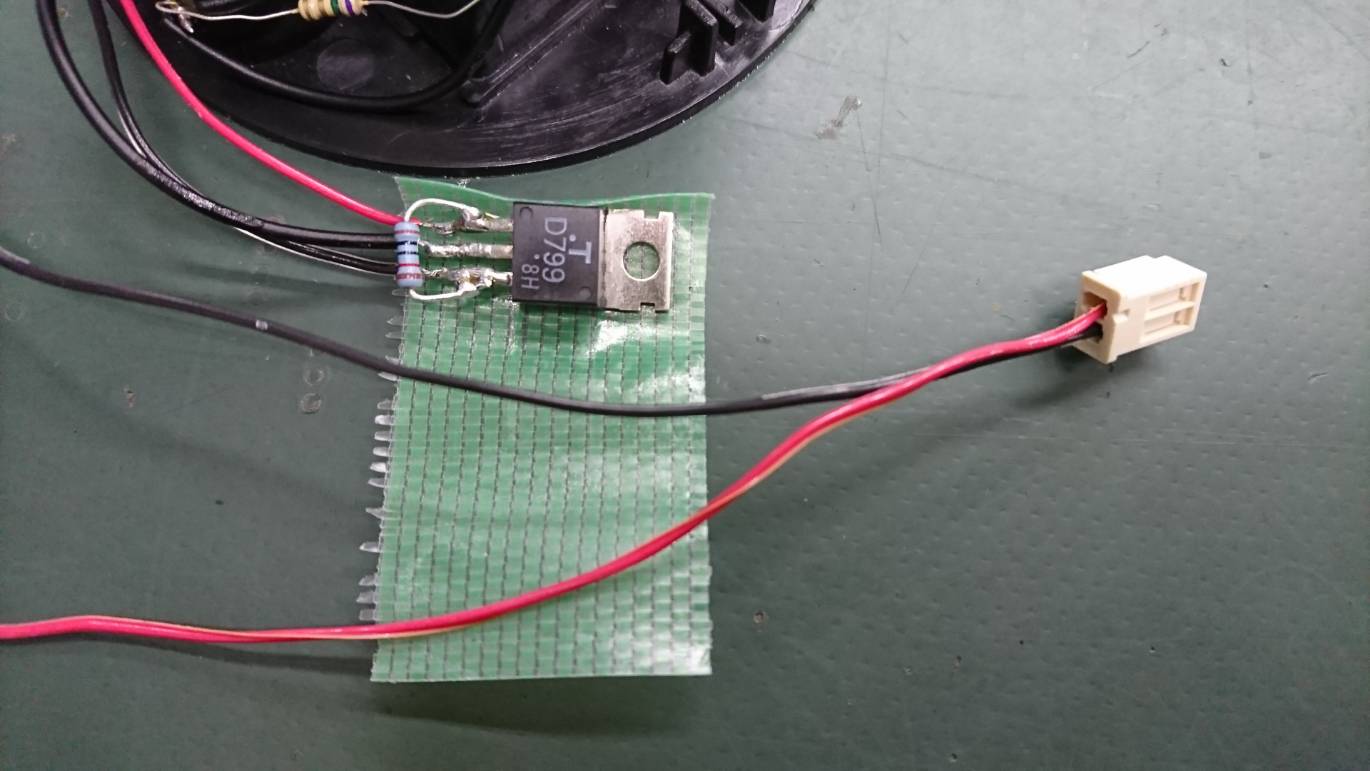
Fig.3 パトランプ完成図2
使用物品
電源基板を作成する際に使用したものをまとめた表をTable.2として以下に示す。| 部品名 | 表記 | 型番,値 | 個数[個] |
|---|---|---|---|
| パトランプ | PL1 | CLV-502 | 1 |
| 電池ボックス | BT1 | - | 1 |
| 抵抗(10KΩ) | R1 | 10kΩ | 1 |
| FET | Q1 | 2SK971 | 1 |
| MOLEX2ピン(メス) | P1 | - | 1 |
各設計書のリンク
作成する基板等のリンクを以下に示す。・電源基板
・ArduinoUNOシールド基板
・RaspberryPiシールド基板
・パトランプ(このページ)