| 名称 |
子機 詳細設計書 |
| 番号 |
MIRS1704-MECH-0012 |
| 版数 |
最終更新日 |
作成 |
作成者 |
承認 |
改訂記事 |
| A01 |
2018.02.09 |
2017.12.27 |
加藤 智己 |
青木 悠祐 |
初版 |
ドキュメント内目次
1.はじめに
本ドキュメントは、子機の詳細設計書である。
2.各部の役割
以下にfig.1に子機の形状と、各部の果たす役割を示す。
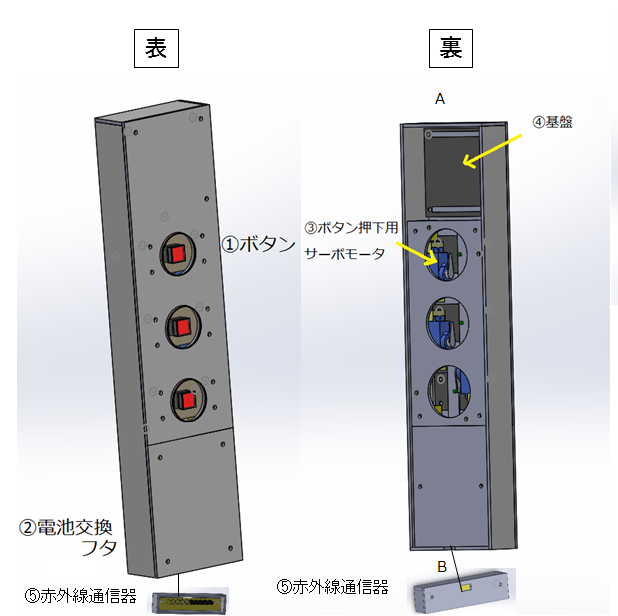
fig.1 子機の形状と各部の果たす役割
この子機はエレベータの操作盤に設置して使う。
MIRS本体から赤外線信号を⑤の赤外線通信器で受信する。
指定されたボタンを③のサーボモータによって押下する。
子機にも①ボタンをつけており、人間が子機を介して間接的にエレベータのボタンを押せるようにした。
2-1.サーボモータによるボタン押し機構
ここでは、③のサーボモータによるボタン押し機構についてfig.2に示す。
この図は、子機をfig.1のAからBへ縦に切り、その断面を真横から見た状態で、さらにそのうちのサーボモータユニット一区画分を抜粋した図である。
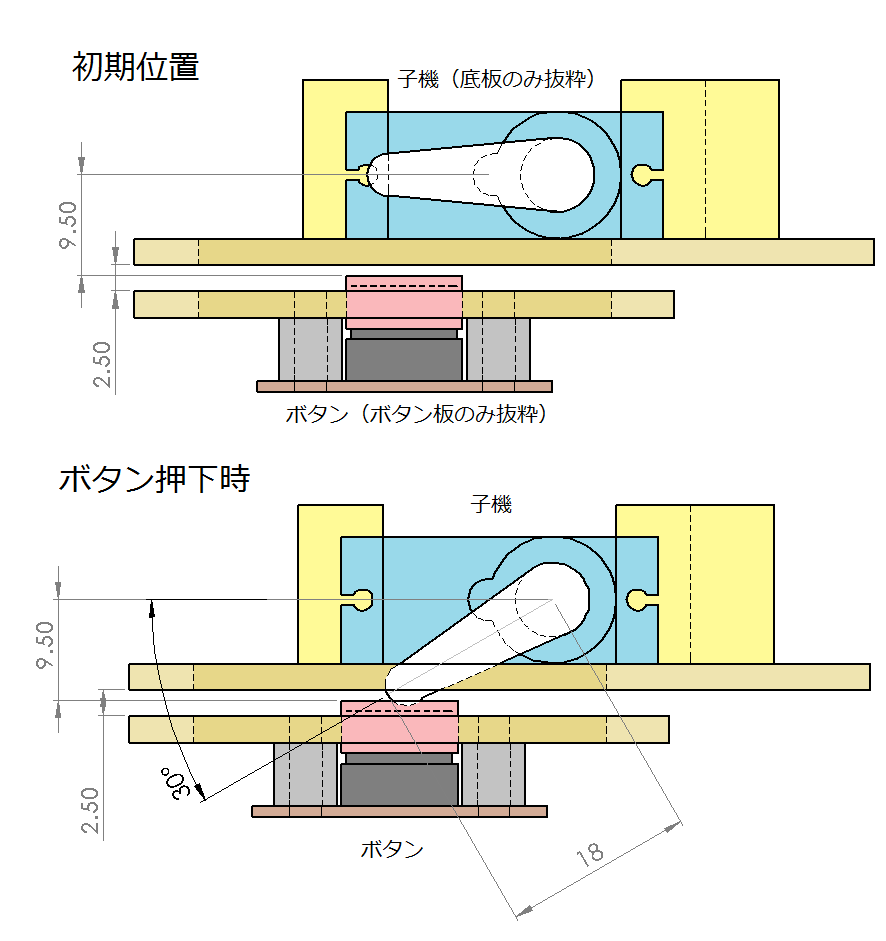
fig.2 サーボモータがボタンを押下する仕組み
初期位置を0度とする。ボタン押下時は初期位置から左方向に30度旋回した位置となる。
サーボモータの出力する角度はプログラムによって制御するため、動作角度を制限する機械的な補助具は取り付けていない。
3.子機の組み立て
3-1.外観
以下にfig.3 fig.4に完全実装図を示す。
また、以下table 1に完全実装図のリンクを示す。
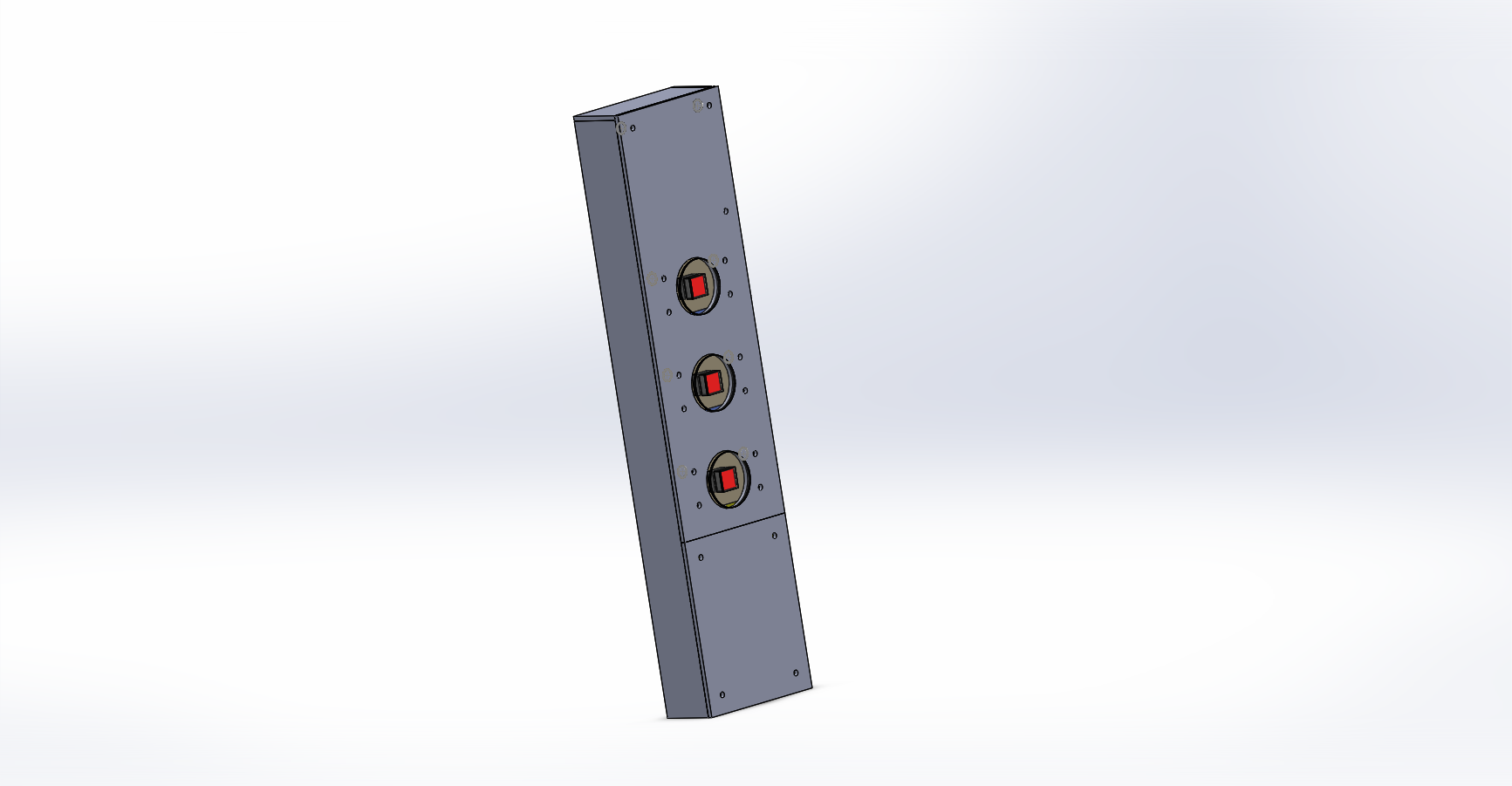
fig.3 完全実装図 表
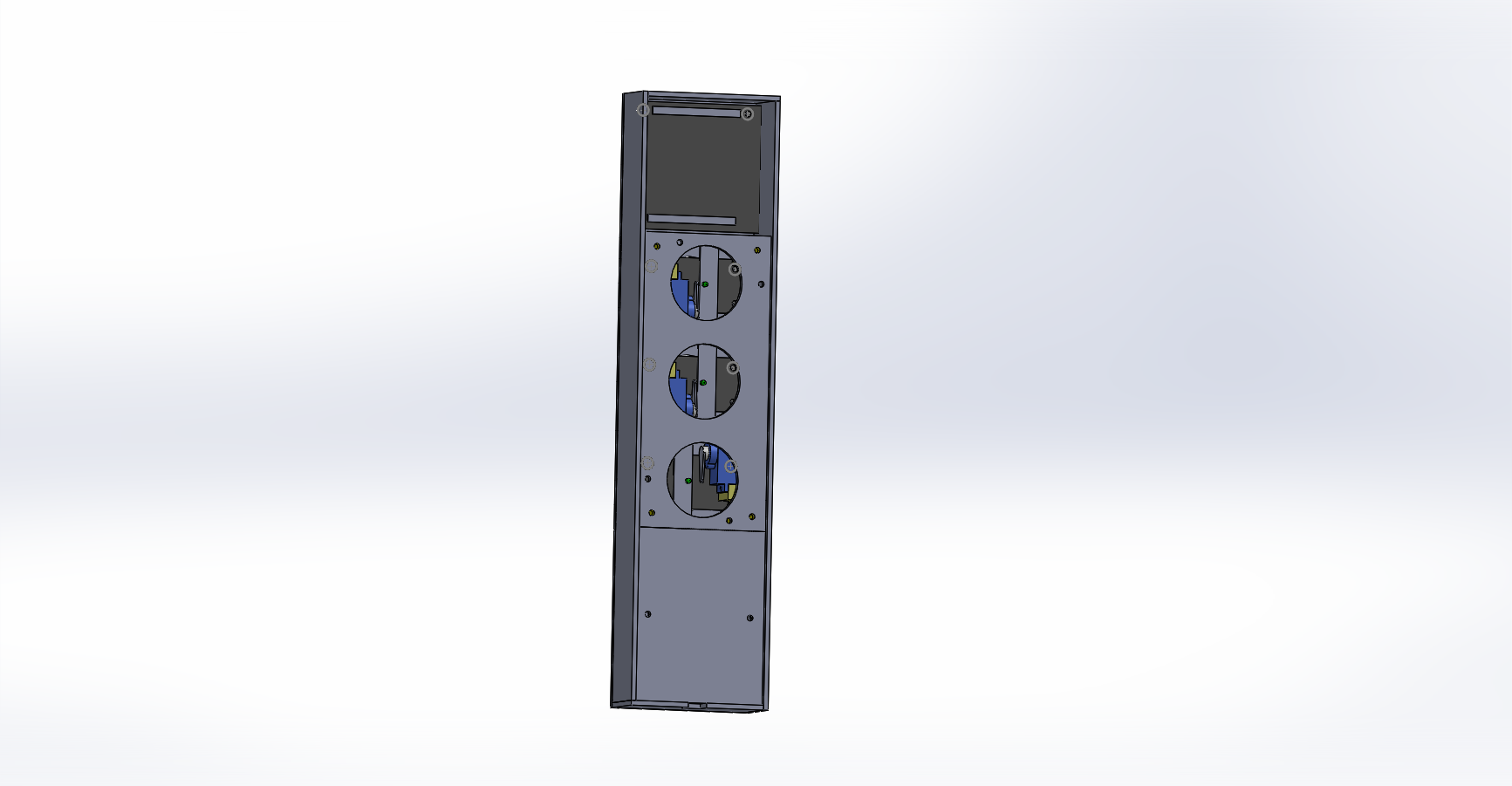
fig.4 完全実装図 裏
table 1 完全実装図
3-2.構成部品
以下table 2に構成部品とその図面および詳細を記したページへのリンクを示す。
table 2 構成部品表
3-3.部品加工
以下にtable 3に加工箇所とその方法を示す。
table 3 部品加工
| 加工箇所 | 加工方法 |
| 木板切断 | レーザー加工機を使用した。 |
3-4.組み立て手順
まずA-Eの板を組み上げる。以下table 4に組立図のリンクを示す。
table 4 上箱組立図
組み上げた上箱に15mm立方体と15x15x8mmブロックを木工用ボンドで接着する。以下table 5に上箱ブロック組込図のリンクを示す。
table 5 上箱ブロック組込図
6mmスペーサ(M3ナットx3で代用可)とM3x12ねじを用いてボタン基盤、メイン基盤を取り付ける。
以下table 6に上箱完全実装図のリンクを示す。また、fig.5 fig.6に上箱完全実装図を示す。
table 6 上箱完全実装図
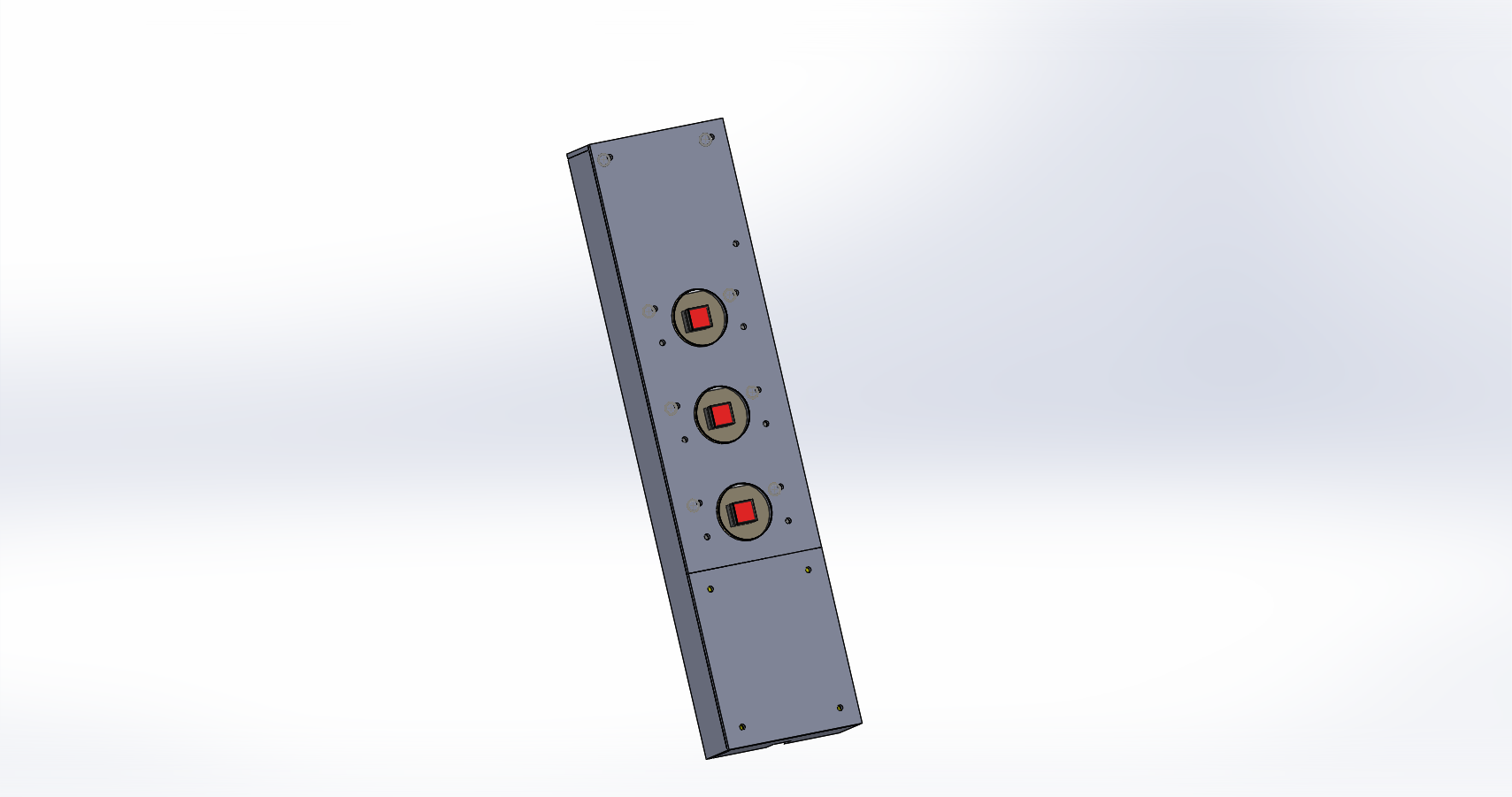
fig.5 上箱完全実装図 表
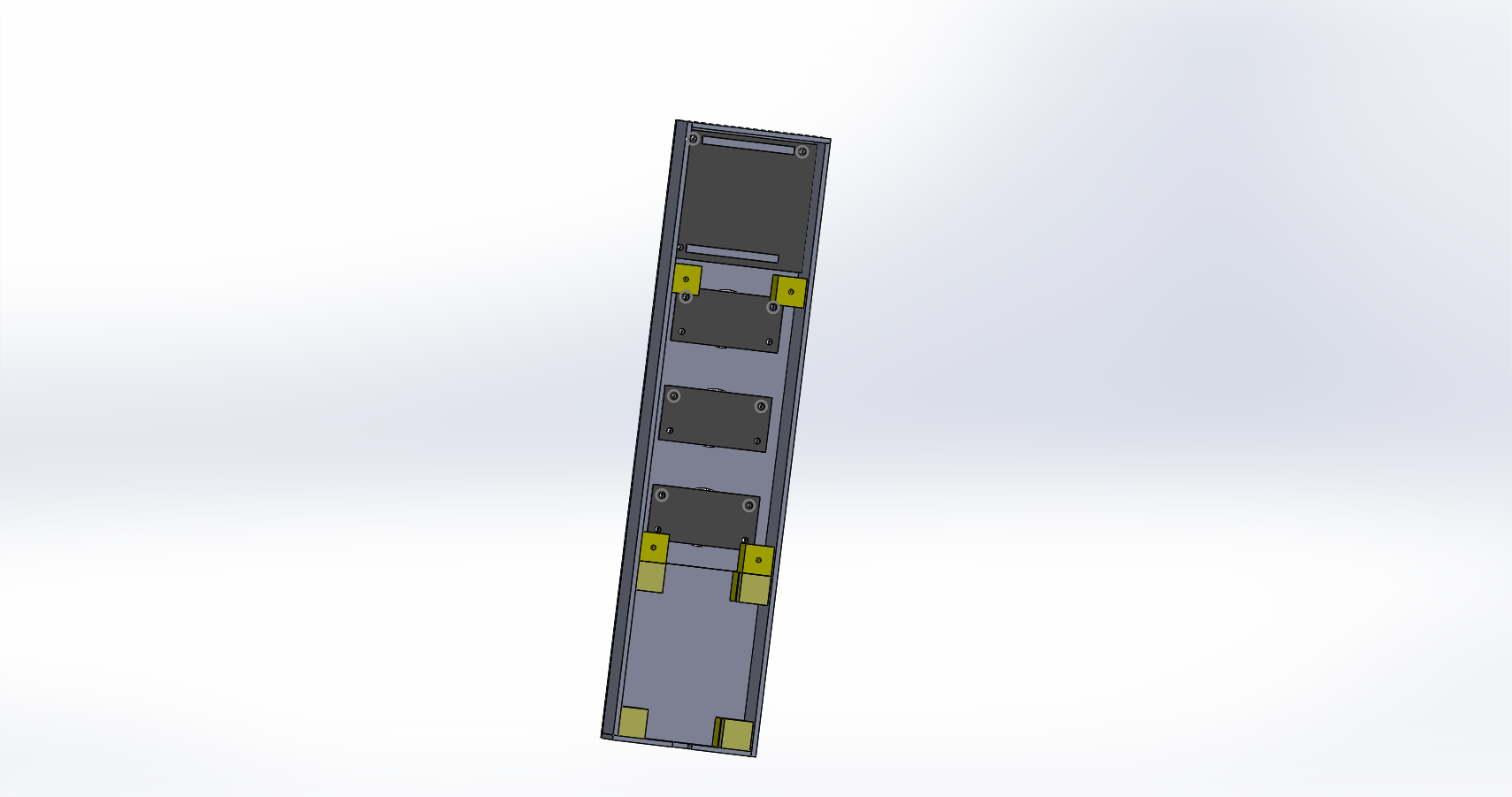
fig.6 上箱完全実装図 裏
次に底板Dに木工用ボンド、接着剤を用いサーボモータユニットとフォトトランジスタユニットを組み込む
以下table 7に底板実装図のリンクを示す。また、fig.7 fig.8に底板サーボモータ実装図を示す。
table 7 底板実装図
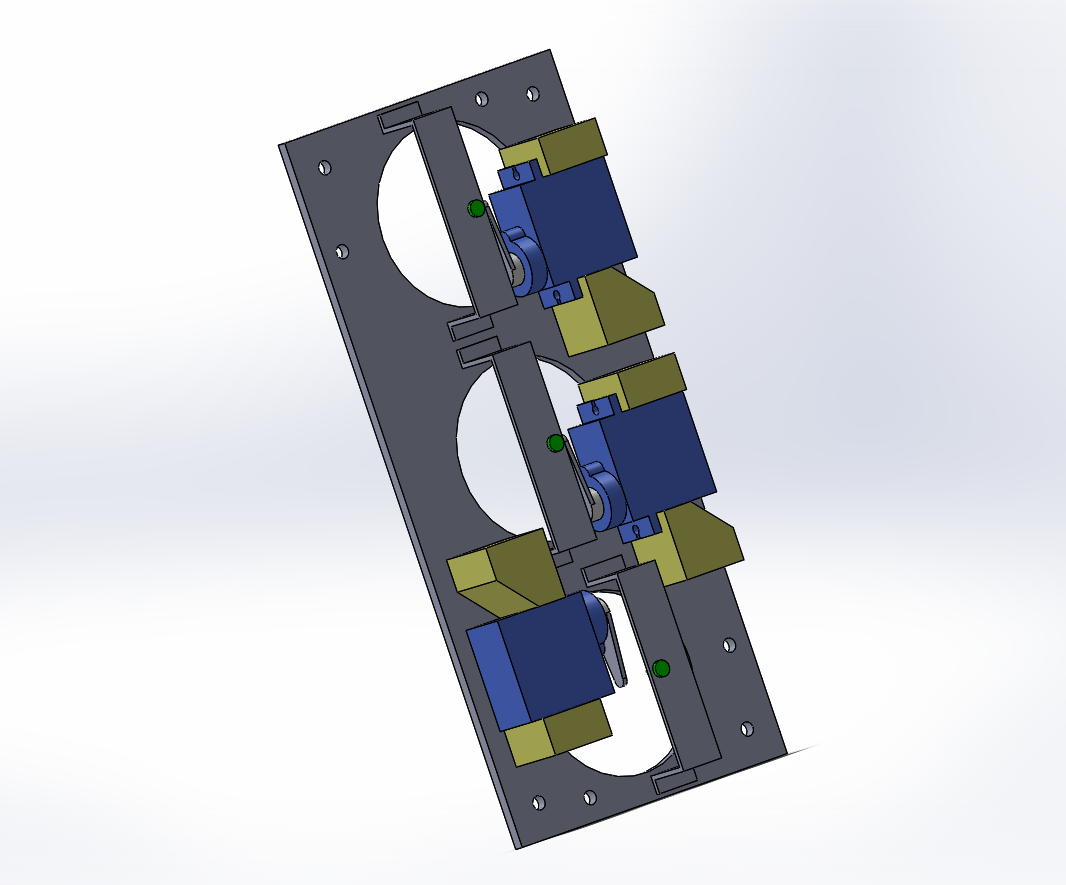
fig.7 底板サーボモータ実装図 表
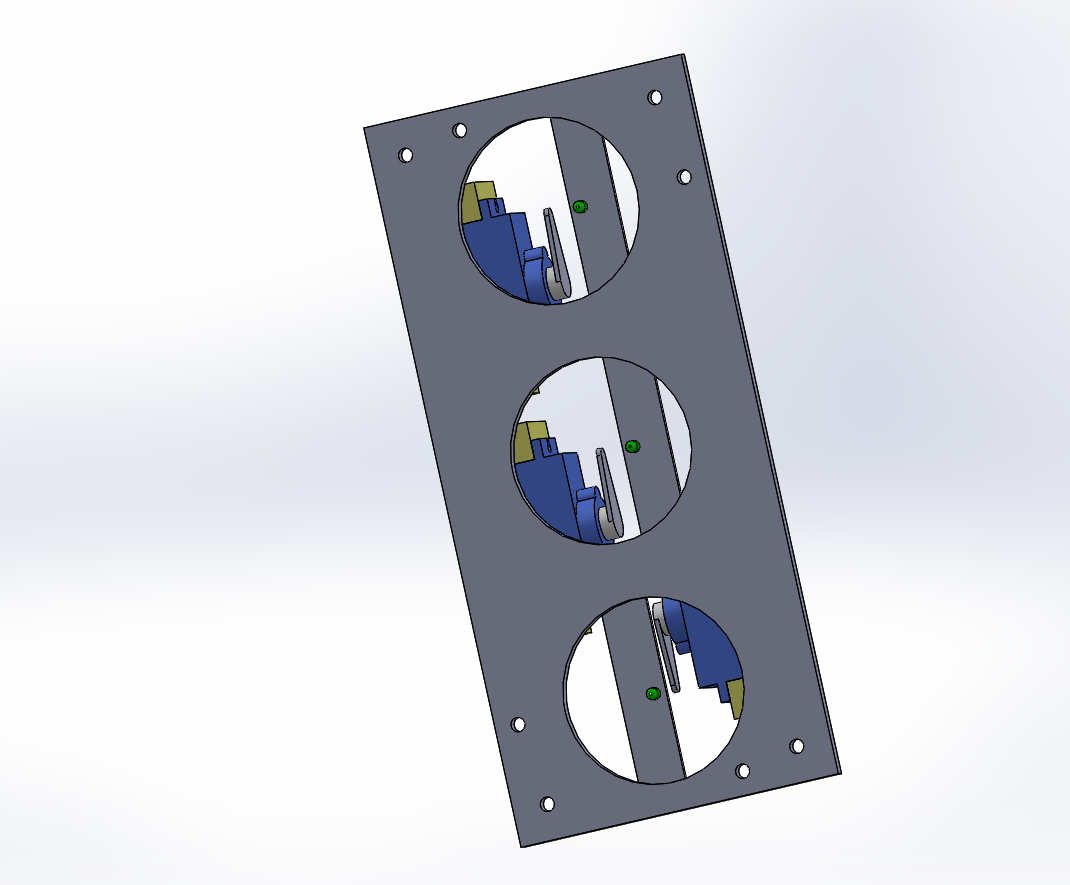
fig.8 底板サーボモータ実装図 裏
次に底板Eに、M3ナットとM3x10ねじを用い電池ボックスを組み込む
また、fig.9に底板電池ボックス実装図を示す。
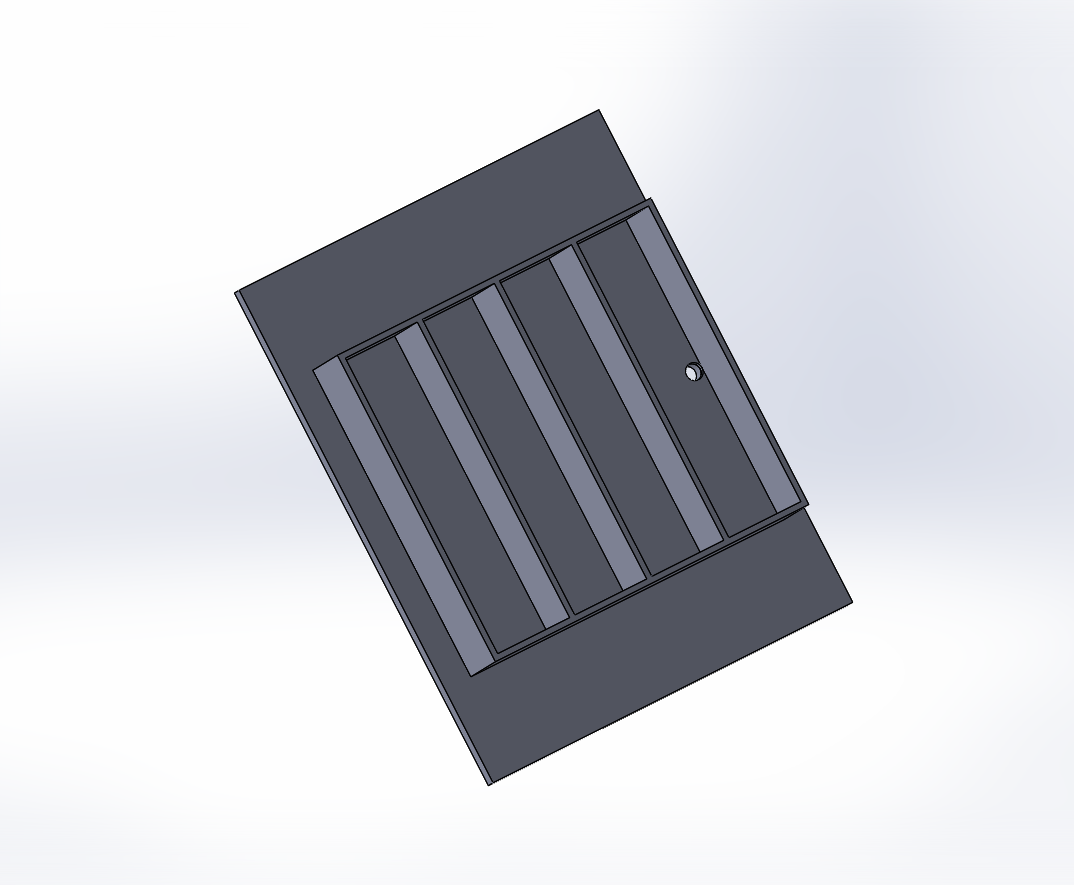
fig.9 底板電池ボックス実装図
最後に上箱と底板と6mmスペーサー(M3ナット3つで代用可)を組み合わせM3x10ねじで固定すれば完成である。
4.赤外線通信ユニット箱の組み立て
4-1.外観
以下にfig.10 fig.11に完成図を示す。
以下table 8に完成図のリンクを示す。
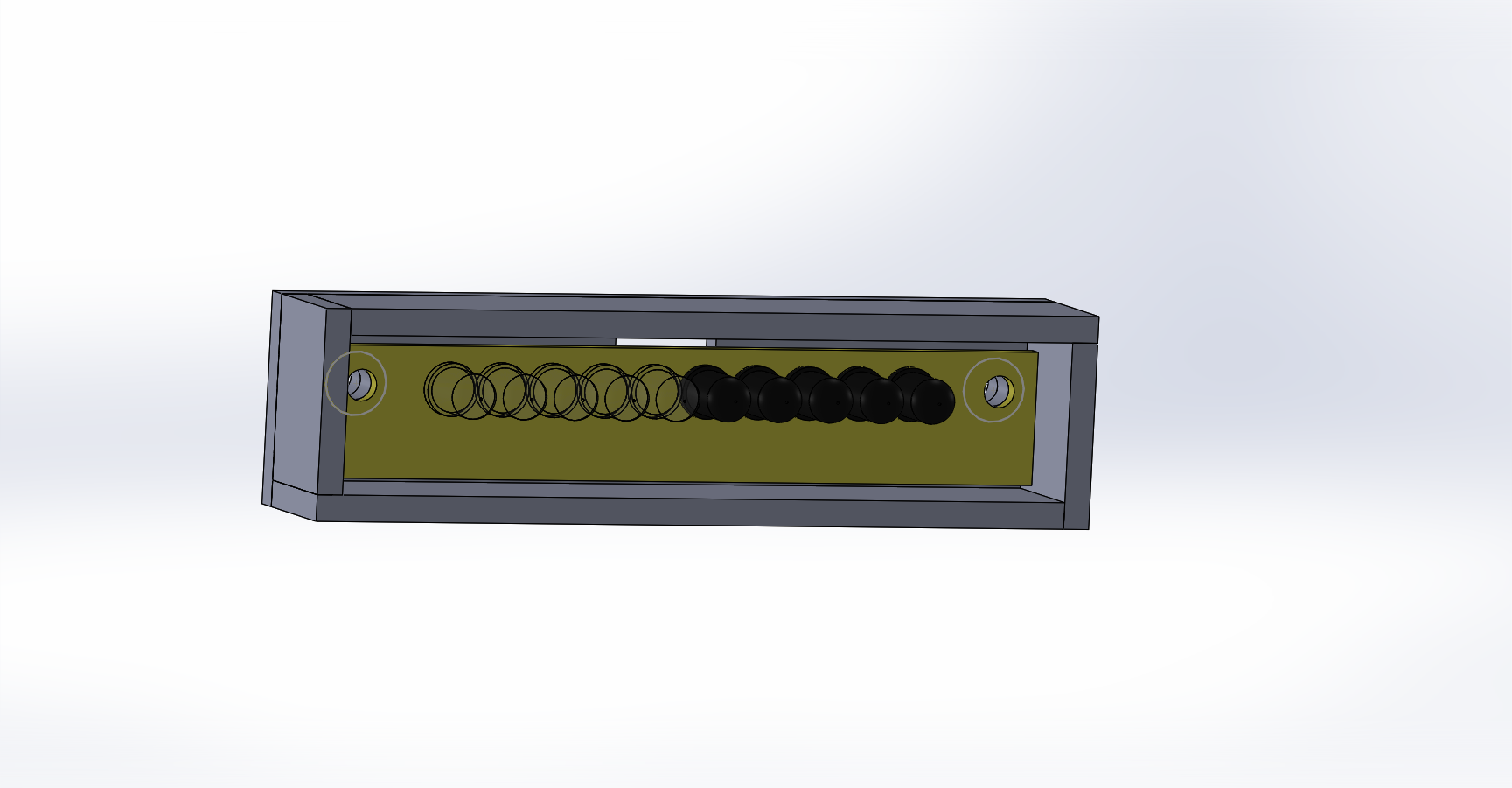
fig.10 完成図 表
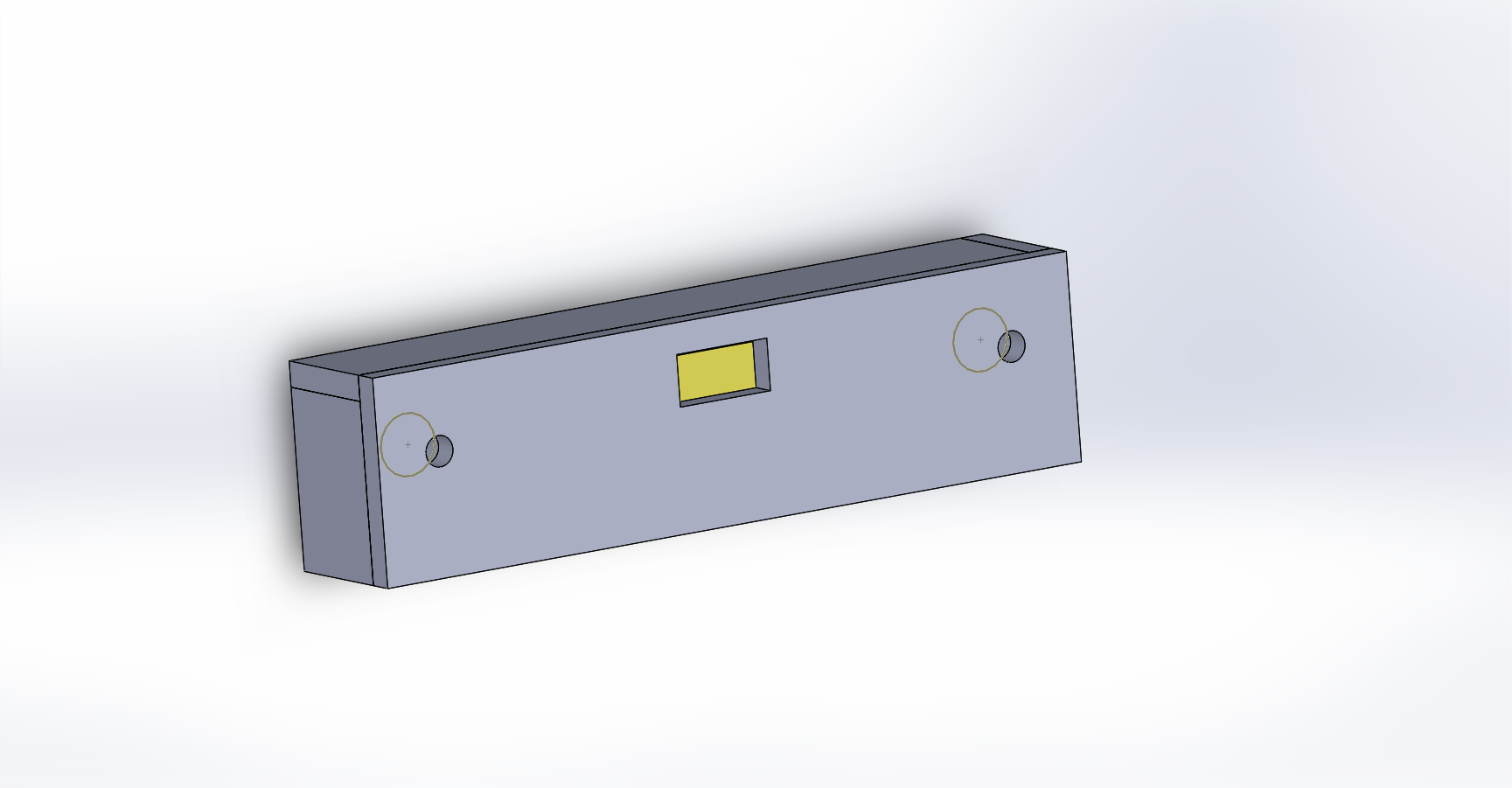
fig.11 完成図 裏
table 8 完成図
4-2.構成部品
以下table 9に構成部品とその図面および詳細を記したページへのリンクを示す。
table 9 構成部品表
4-3.部品加工
以下にtable 10に加工箇所とその方法を示す。
table 10 部品加工
| 加工箇所 | 加工方法 |
| 木板切断 | レーザー加工機を使用した。 |
4-4.組み立て手順
まずA-Eの板を組み上げる。以下table 11に組立図のリンクを示す。
table 11 組立図
箱と基盤を6mmスペーサー(M3ナット3つで代用可)と組み合わせM3x10ねじで固定すれば完成である。