| パーツ名 | 使用用途 | 加工方法 |
|---|---|---|
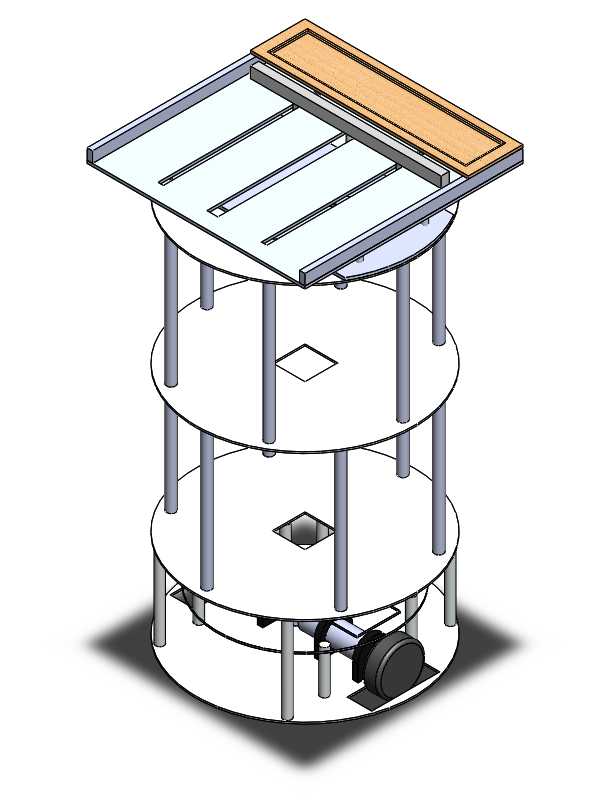
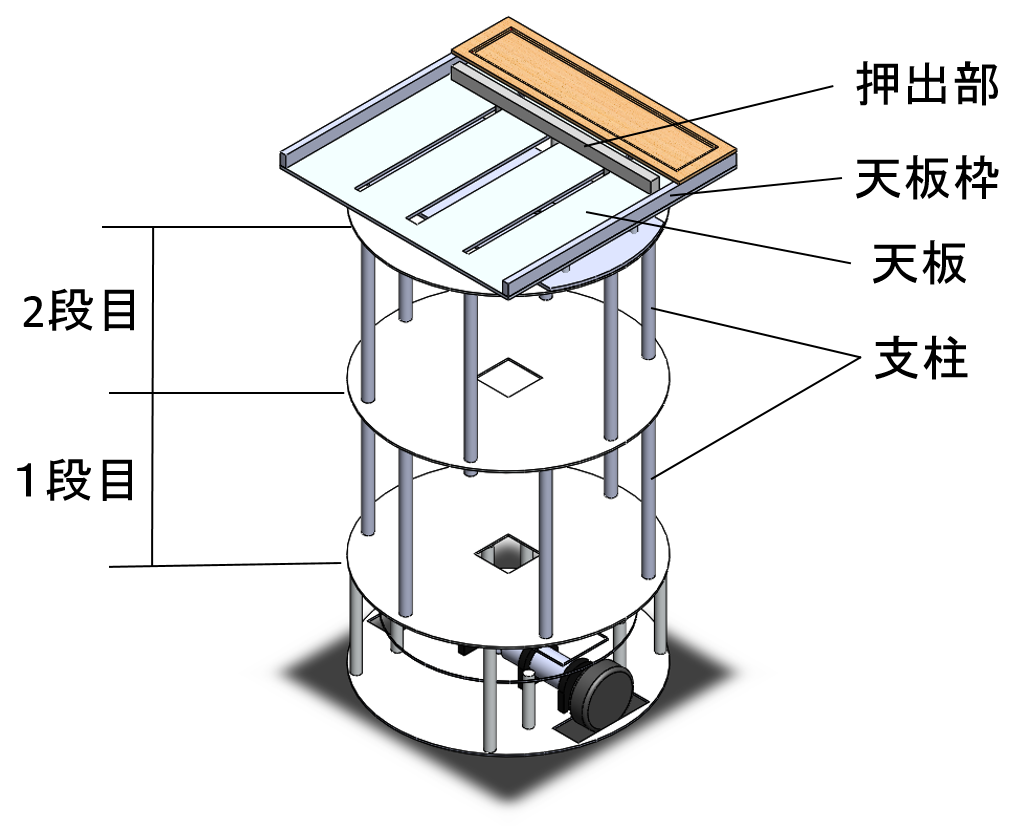
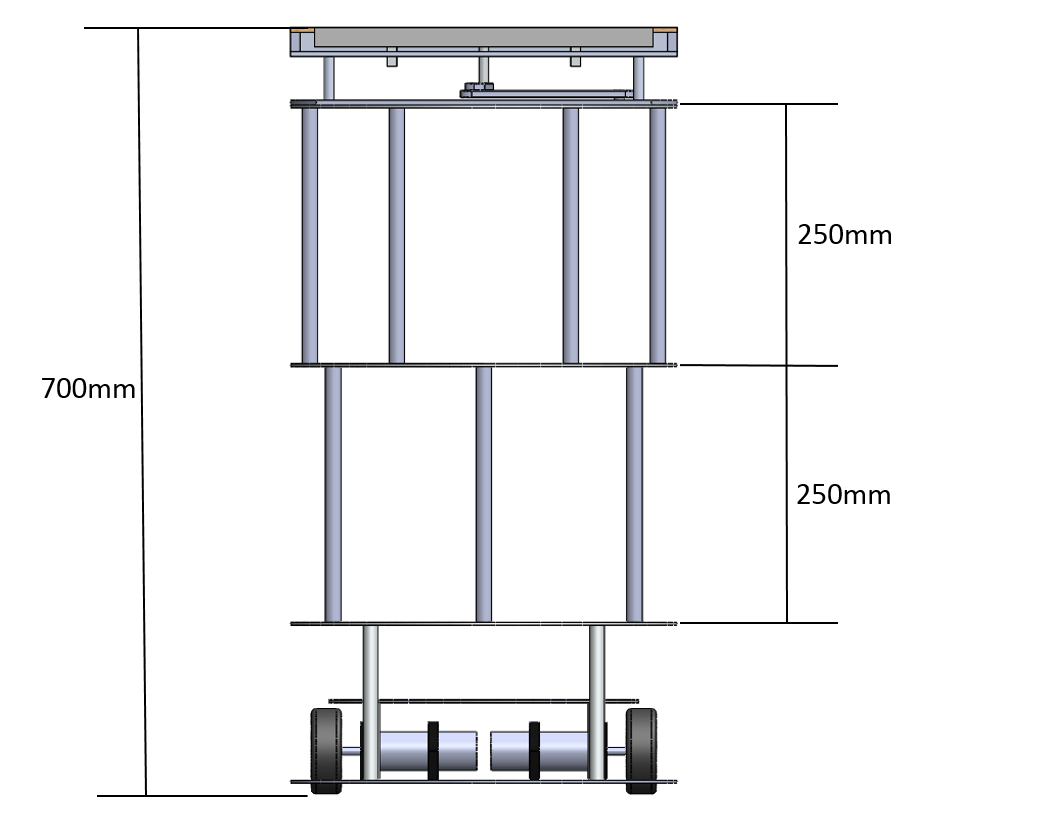
| 本体支柱 | 高さの確保及び天板機構部の支持 | 円柱アクリル材を用い、250mmの長さに切断する |
| アルミ中板 | 安定性、強度の確保 | アルミ円板を使用し、中央に5cm四方の正方形の穴を開ける |
| アクリル中板 | 本体支柱の取り付け及び強度の確保 | アルミ中板と同様 |
| モータマウント | 天板機構部のモータ取り付け | 3Dプリンタで作製(予定) |
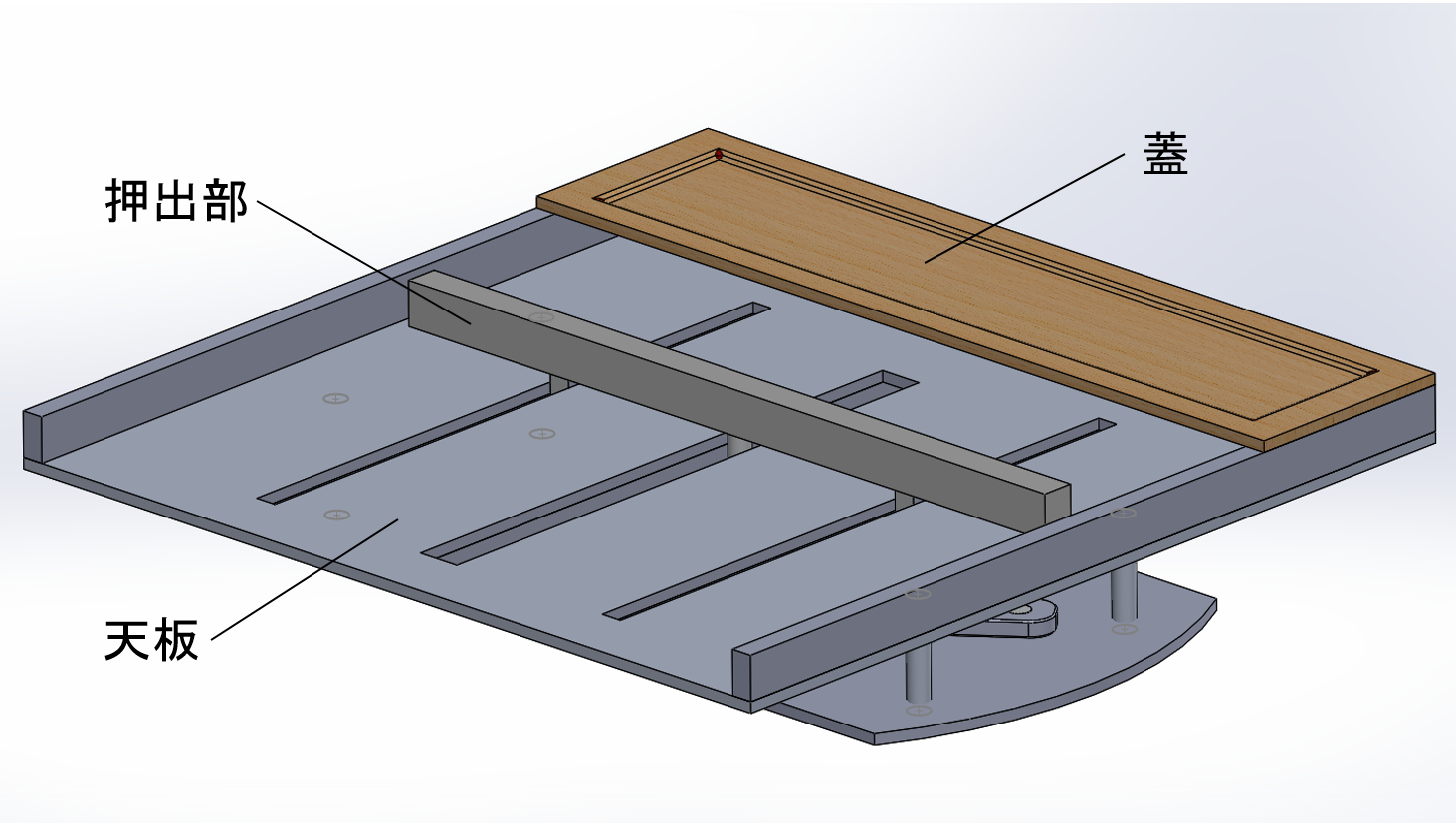
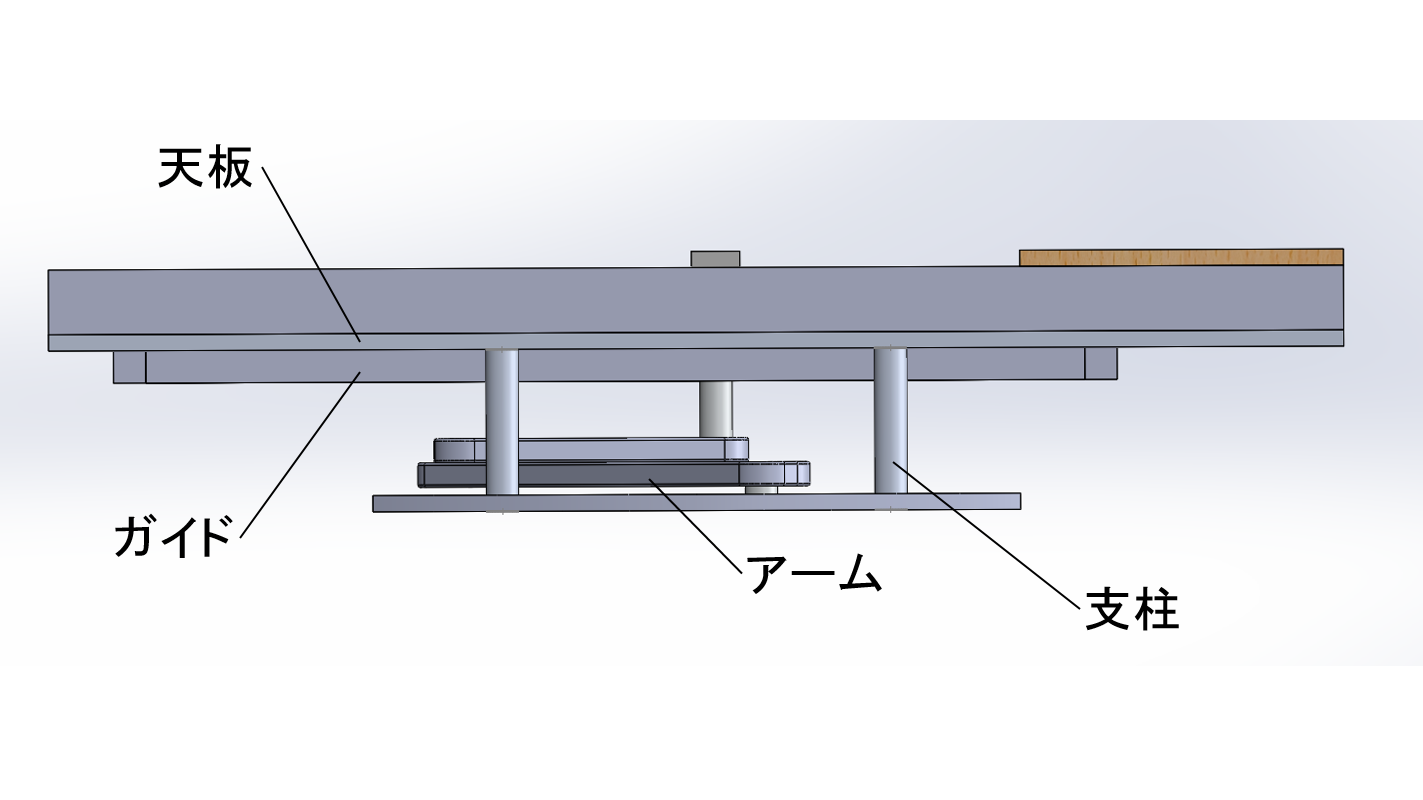
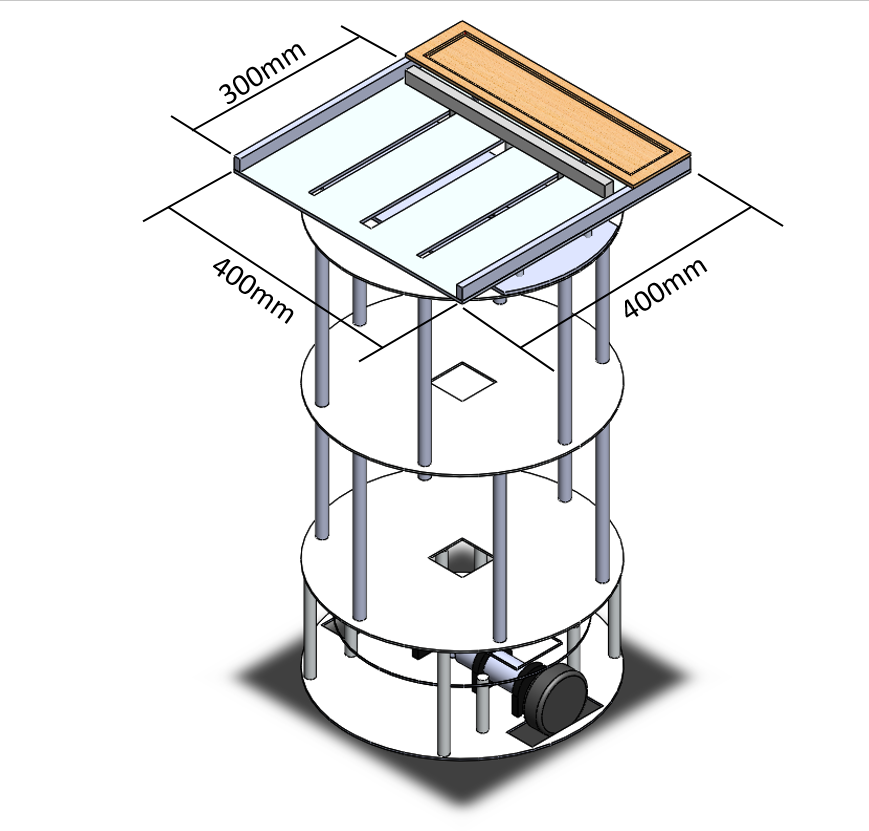
| 天板 | 機構の取り付け | |
| 押出用ガイド | 押出機構に直進運動をさせるレールの役割 | アルミ角材を用いてフレーム状にボルトで固定する |
| タッチセンサ | 押出機構の制御 | ガイド部分にねじで固定 |
| 天板枠 | 天板上の配膳物の保持 | 木材を天板の長さに切断 |
| アーム | 押出面モータの動力を伝える | アルミ板を長方形に切断し、両端に穴を開ける |
| カバー | 天板上の使用できない部分を覆う | 木版を天板の寸法に合わせて切断、ねじまたはボルトで固定 |
| アーム・押出部支柱 | アームと押出部の接続 | アルミ円柱によりねじで固定 |
| ガイド支柱 | 押出部とキャスターの接続及び直進動作の保持 | アルミ円柱または角材をキャスターと固定 |
| 名称 | MIRS1703基本設計MECH |
|---|---|
| 番号 | MIRS1703-DSGN-0003a |
最終更新日:2017.11.06
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2017.11.11 | 上野山 | 鈴木静男 | 初版 |