はじめに
本ドキュメントは8月9日に行われる1日体験入学でのデモ走行のため、
標準機を用いて競技をクリアするための戦略、プログラム設計、開発工程について記したドキュメントである。
このドキュメントを作成するにあたり、MIRS1404の班員全員でミーティングを行い、方針を固めた上で作成した。
基本方針
DB(ダイレクションボード)に記されているスイッチを確実に押すことを基本方針とする。
目標タイムを約1分35秒としゴールまで進む距離を6.5[m]とすると約68[m/s]で走ればよいが、画像認識等の時間もあるため、この速度よりも速く動作させる必要がある。
標準機の仕様変更について
体験入学デモのコース攻略のために、標準機に超音波センサを以下のように追加する。
標準機:前2機、左0機、右0機
追加後:前2(右:uss1,左:uss2)機、左1機(uss3)、右1機(uss4)
追加した超音波センサについては試験を行った後実装する。
計測する角度については0°とし距離については標準部品試験と同じ基準で測定する。
競技概要
競技会の詳細はドキュメントに記載されている。
○参考ドキュメント
一日体験入学デモ競技会 競技規定
コース概要は以下のようになっている。
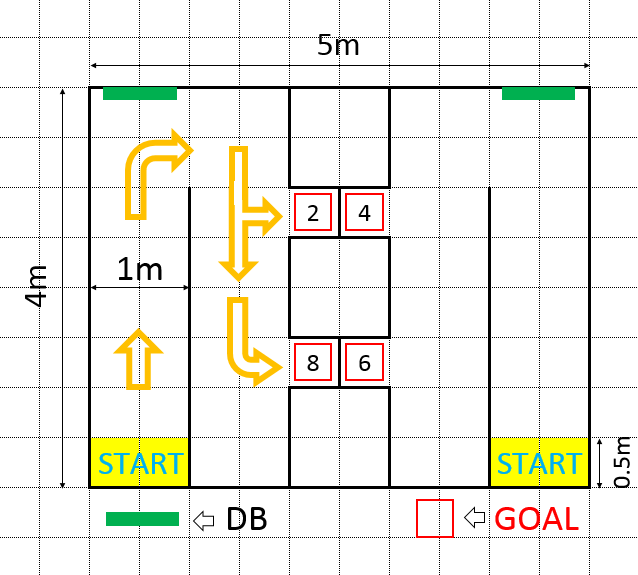
Fig.1 競技会コース
動作の流れ
プログラムの大まかなフローチャートをFig.2に示す。MG3Sの標準機能では、各機能をモジュール化設計し、必要に応じ各機能を呼び出す形をとっている。
各機能の動作は機能定義の項で示す。
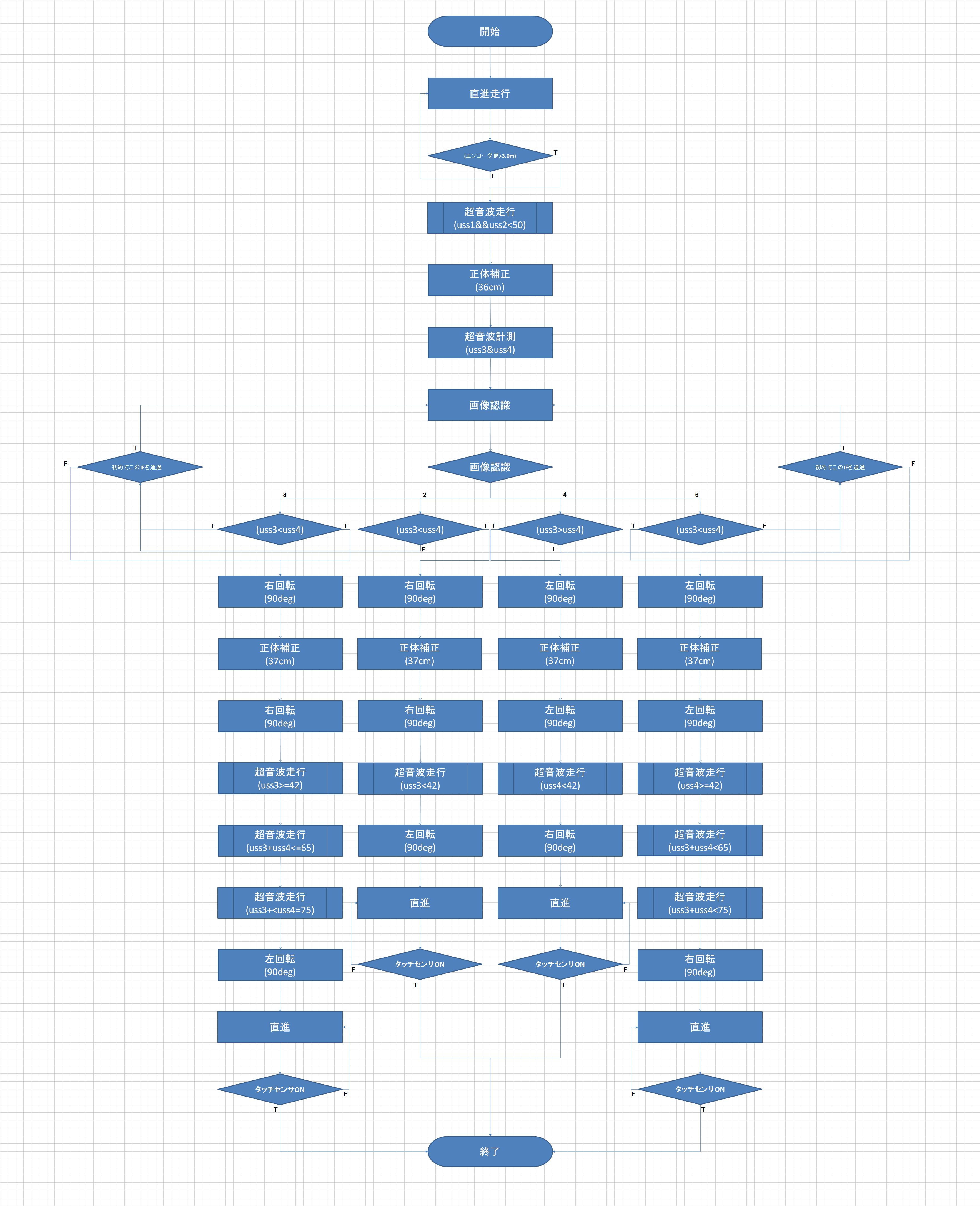
Fig.2 プログラム概要
- 機能定義
- 超音波走行
- 関数名:uss_run
- 引数:(int mode,int uss1,int uss2,int uss3,int uss4,int distance)
- 機能概要:引数で使用する超音波センサ(uss1~4)と整数値を与え、与えた整数値より超音波センサの値が下回るor上回る(これは引数:modeによって定義される。)場合に直進走行を停止する。
- 性能要求:与えた整数値とプログラム終了時の障害物と超音波センサの値との差が±3cm以下となるようにする。
- 備考:直進走行は基本動作の関数を使用する。以下にプログラムのフローチャートをFig.3に示す。
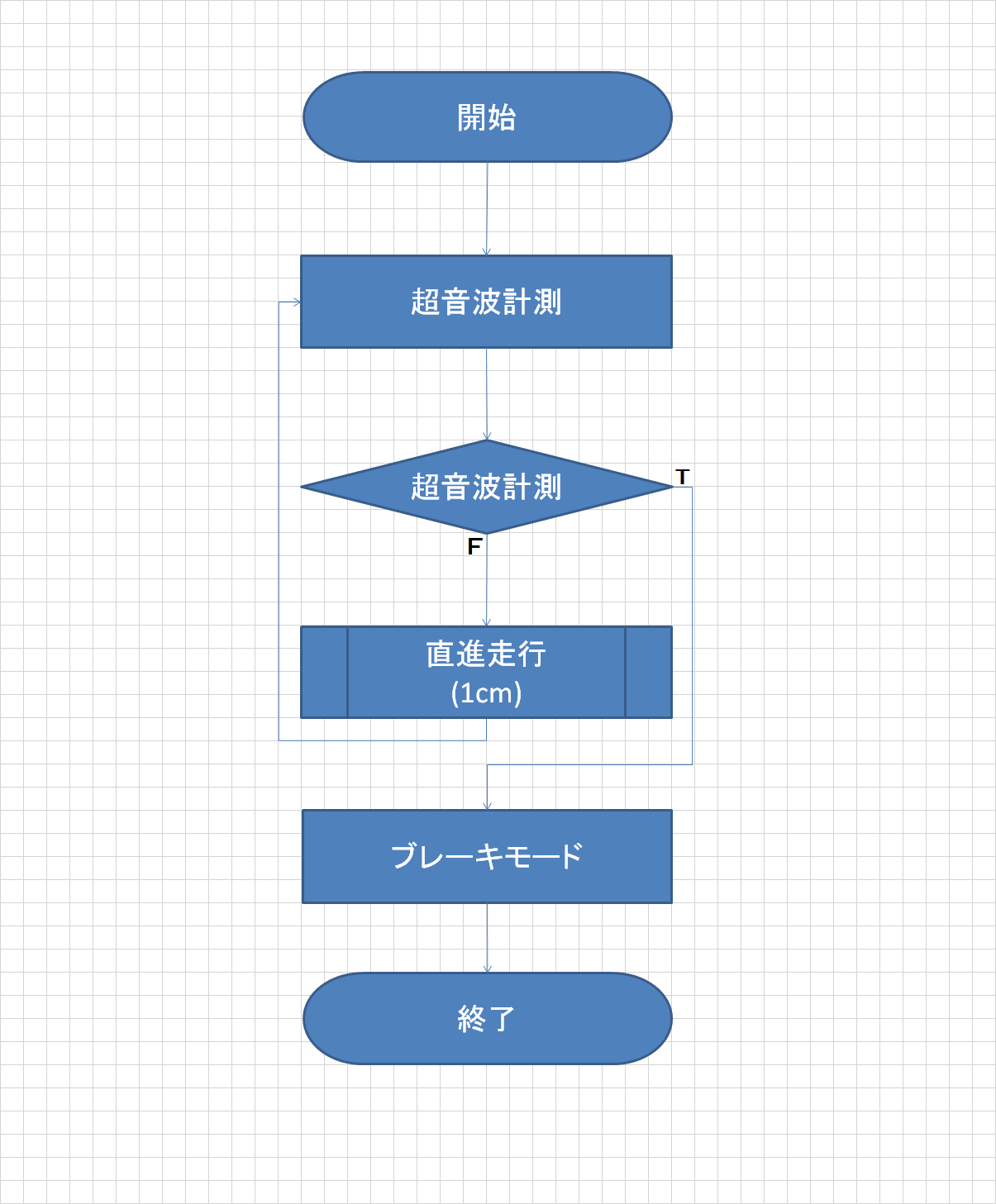
Fig.3 プログラム概要

エラー回避動作
意図しない動作を防ぐための回避動作を以下に示す。
- スタートから直進走行
スタートからのデフォルトの正面の超音波センサの値が9999になるのを防ぐために約3.0[m]まではエンコーダを用いて走行する。
3.0[m]という値はなるべくタイムを稼ぎたいため、エンコーダ用いて走行距離を制御する場合、高速でMIRSを走行させる場合に動作周期の低い超音波センサより正確に走行を制御 できる。
MIRS1404の機体はモータの信頼性に欠けるが、10cmオーダーで見たエンコーダの値は信頼できるものである。 3.0mより先の40cmは中速の超音波走行へ移行しそこから先10cmは正確であるが低速の正体補正にて走行、しDBの画像認識に万全を期す。 このように3段階の走行制御により走行の速度と正確性を両立させる。
正体補正した後に画像処理をする予定だったが、これではエラー回避ができないため、超音波センサによる計測を追加する。
具体的な内容として、
左右の超音波センサの値の判別(右側のussの値が左側よりも大きかったら、'2'、'6',左側のussの値の方が大きかったら'4'、'8'をだす)
↓
画像処理をする。
↓
ussの測定結果と画像処理が一致なら → 次の処理
一致しなかったら
↓
再度画像処理をし、一致したら → 次の処理
一致しなかったらussの値を用いて方向を判別し、次の処理を行う。
超音波センサによる早期のゴールの判別により、判別後にゴール方向に回転し、直進する際に、角に当たってしまう可能性がある。
これを回避するために超音波センサを機体の後ろにつけ、計測を遅らせ、角にあたるリスクを無くす。