|
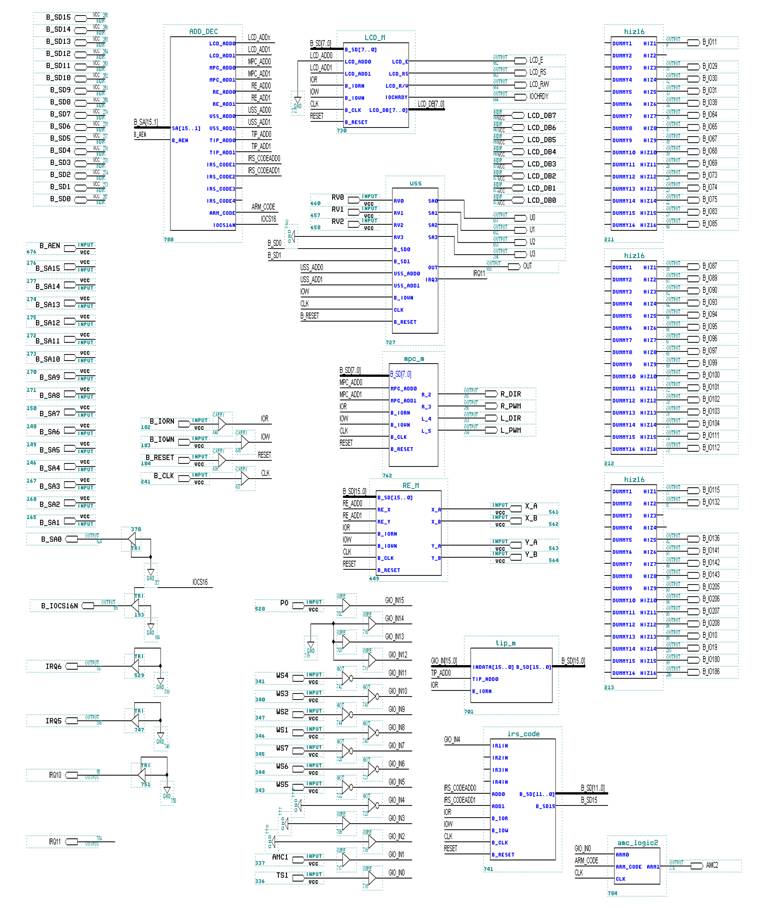
2.2. USSの変更
MIRS0802では、USSポートを3箇所しか使用しないため、残りの1箇所を入力、出力ともにハイインピーダンス状態に変更した。
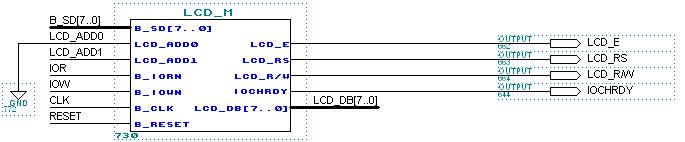
2.3. LCD_Mの変更
MIRS0802では、LCDを使用しないので、LCD_ADD0にGNDを接続しLCD_Mが動作しないようにした。
2.4. ADD_DECの変更
MIRS0802では、アーム制御用の回路を新たに作成したため、それに伴いADD_DEC内にARM_CODEを追加した。
LIBRARY ieee;
USE ieee.std_logic_1164.all;
ENTITY ADD_DEC IS
PORT
(
SA :
IN STD_LOGIC_VECTOR(15
DOWNTO 1);
B_AEN :
IN STD_LOGIC;
LCD_ADD0,LCD_ADD1 : OUT STD_LOGIC;
MPC_ADD0,MPC_ADD1 : OUT STD_LOGIC;
RE_ADD0,RE_ADD1 :
OUT STD_LOGIC;
USS_ADD0,USS_ADD1 : OUT STD_LOGIC;
TIP_ADD0,TIP_ADD1 : OUT STD_LOGIC;
IRS_CODE1 :
OUT STD_LOGIC;
IRS_CODE2 :
OUT STD_LOGIC;
IRS_CODE3 :
OUT STD_LOGIC;
IRS_CODE4 :
OUT STD_LOGIC;
ARM_CODE :
OUT STD_LOGIC;
IOCS16n :
OUT STD_LOGIC
);
END ADD_DEC;
ARCHITECTURE DATAFLOW OF
ADD_DEC IS
signal
add : std_logic_vector(15 downto 0);
BEGIN
add <= SA & B_AEN;
LCD_ADD1 <= SA(1);
PROCESS (SA,B_AEN)
BEGIN
CASE
add IS
WHEN
"0000000100000000"
|"0000000100000010"
=>LCD_ADD0 <=
'1';
MPC_ADD0 <=
'0';
MPC_ADD1 <=
'0';
RE_ADD0 <=
'0';
RE_ADD1 <=
'0';
USS_ADD0 <=
'0';
USS_ADD <=
'0';
TIP_ADD0 <=
'0';
TIP_ADD1 <=
'0';
IRS_CODE1 <=
'0';
IRS_CODE2 <=
'0';
IRS_CODE3 <=
'0';
IRS_CODE4 <=
'0';
ARM_CODE <=
'0';
IOCS16n <=
'1';
〜中略〜
WHEN
OTHERS => LCD_ADD0 <=
'0';
MPC_ADD0
<=
'0';
MPC_ADD1
<=
'0';
RE_ADD0 <=
'0';
RE_ADD1 <=
'0';
USS_ADD0
<=
'0';
USS_ADD1
<=
'0';
TIP_ADD0
<=
'0';
TIP_ADD1
<=
'0';
IRS_CODE1 <= '0';
IRS_CODE2
<= '0';
IRS_CODE3 <= '0';
IRS_CODE4
<= '0';
ARM_CODE <=
'0';
IOCS16n <=
'0';
END
CASE;
END PROCESS;
END DATAFLOW;
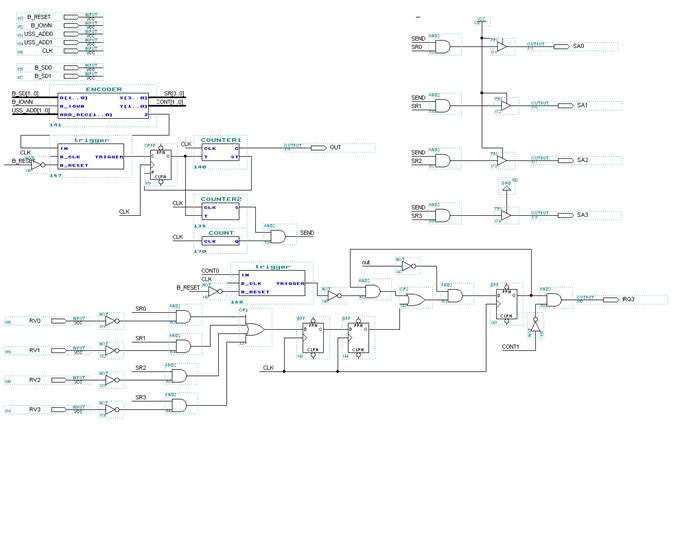
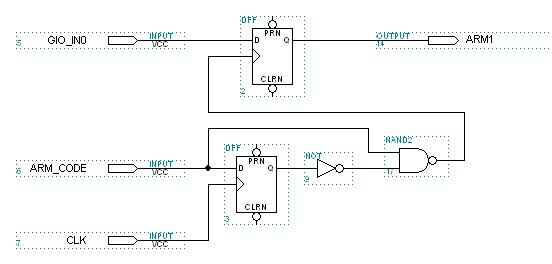
3. ARM制御回路の増設
3.1. ARM制御回路
MIRS0802では、アームを使用するので、そのアームを制御するための回路を設計した。
アーム制御用の回路とはなっているが、大本は、アーム制御用ボードで行うので、この回路の出力としては信号を送るだけである。
IRS用のピン設定をアームの入力用に使用するよう変更した。
|