奜娤偍傛傃僙儞僒攝抲恾
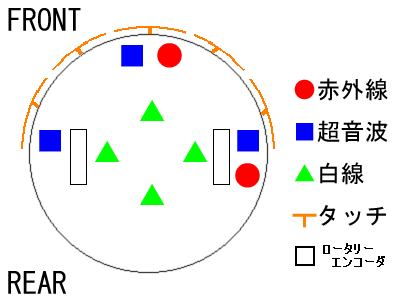
奺僙儞僒偺奣梫
摦嶌偺奣梫
埲壓偵摦嶌偺棳傟傪帵偡丅
摦嶌偺棳傟
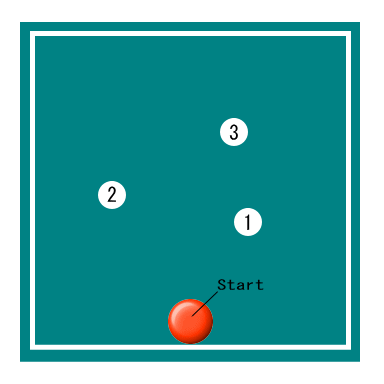
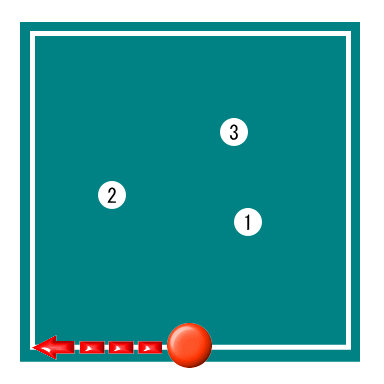
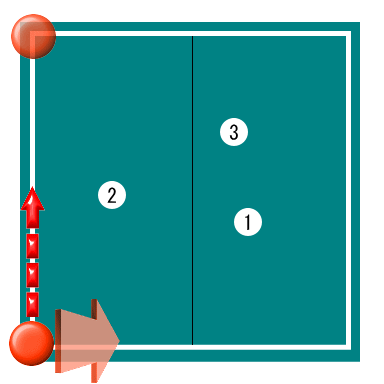
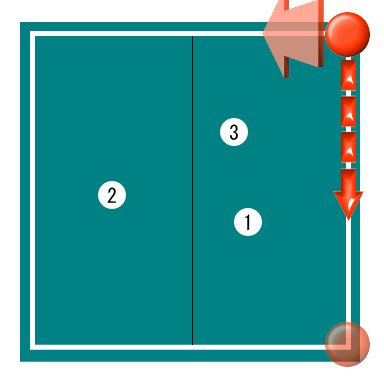
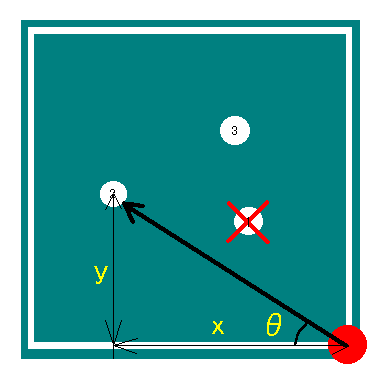
1.start抧揰偐傜僶僢僋偟偰敀慄傑偱恑傓丅
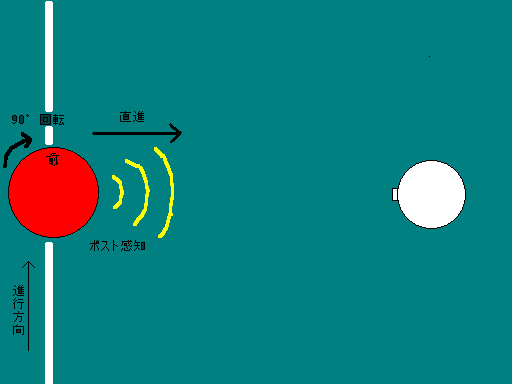
2.敀慄傪姶抦偟偨傜掆巭偟偰丄偦偺抧揰偺嵗昗傪[0,0]偲偡傞丅嵍偵90亱夞揮偡傞丅
3.僙儞僒偱敀慄傪姶抦偟側偑傜丄嫞媄応偺妏傑偱慜恑偡傞丅
4.妏傑偱偒偨傜丄塃偵90亱夞揮偡傞丅
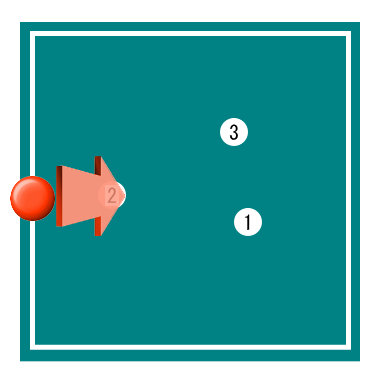
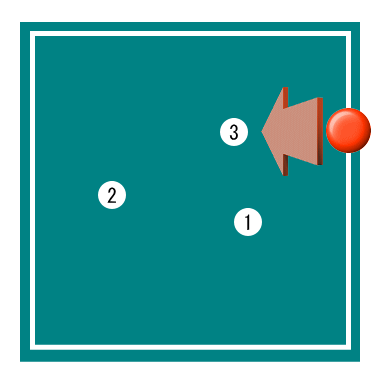
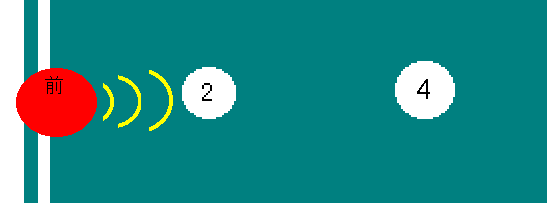
5.敀慄増偄偵慜恑偟側偑傜丄挻壒攇僙儞僒偱億僗僩傪専嶕偡傞丅専嶕斖埻偼嫞媄応偺敿暘丅
6.億僗僩傪敪尒偟偨傜塃偵90亱夞揮偟偰丄億僗僩偵愙嬤偡傞丅
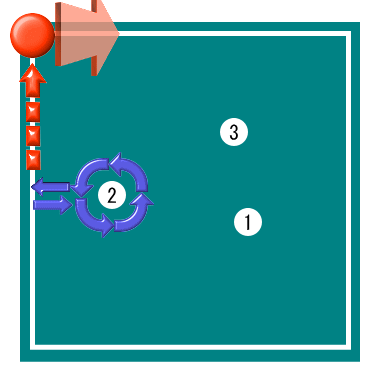
7.億僗僩傪堦廃偟偰丄拞怱偺嵗昗偲No傪婰榐偟偨傜丄敀慄傑偱栠傞丅
(No傪妋擣偟偨帪丄偲傞傋偒億僗僩偱偁傟偽丄偦偺帪揰偱億僗僩傪妉摼偡傞丅)
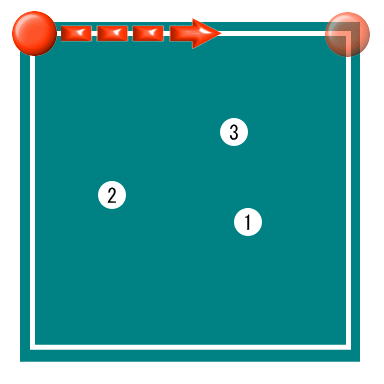
8.敀慄増偄偵恑傫偱丄億僗僩偺扵嶕傪懕偗傞丅
億僗僩傪敪尒偡傞偨傃偵6乣7偺摦嶌傪孞傝曉偟丄妏傑偱恑傓丅
9.妏傑偱偒偨傜塃偵90亱夞揮偟,敀慄増偄偵捈恑偡傞丅偙偺偲偒偼億僗僩偺専嶕偼峴傢側偄丅
10.妏傑偱偒偨傜塃偵90亱夞揮偡傞丅5乣8偺摦嶌傪峴偄丄妏傑偱恑傓丅
(堦廃栚廔椆)
11.堦廃栚偱妋擣偟偨嵗昗傪傕偲偵丄億僗僩偺偁傞曽岦傪寁嶼偡傞丅
偦傟傪傕偲偵丄師偵妉摼偡傞傋偒億僗僩傊岦偐偭偰愙嬤偡傞丅
12.億僗僩傪妉摼偟偨傜丄師偵偲傞傋偒億僗僩傊偲岦偐偭偰恑傓丅
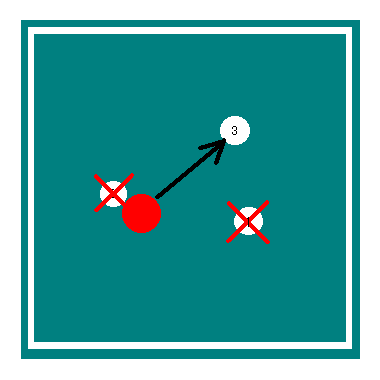
13.偡傋偰偺億僗僩傪妉摼偡傞傑偱11乣12偺摦嶌傪孞傝曉偡丅
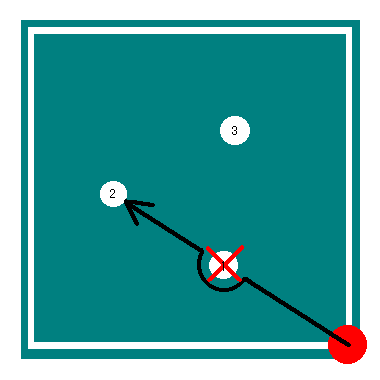
丒捈恑偡傞搑拞偵栚揑偲偼堘偆億僗僩偑偁傟偽丄偦傟偼夞旔偡傞丅
杮愴1夞栚偲2夞栚偺億僗僩偺埵抲偼摨偠偱偁傞丅
偟偨偑偭偰杮愴2夞栚偼丄1夞栚偱摼偨嵗昗傪傕偲偵峴摦偱偒傞偺偱丄11乣13偺摦嶌偺傒傪峴偊偽傛偄丅
堦廃栚
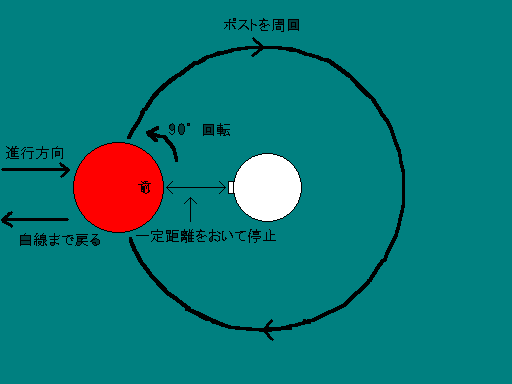
億僗僩偵傇偮偐偭偨傜丄僞僢僠僙儞僒偱億僗僩偵懳偟偰惓柺傪岦偔傛偆偵挷惍偡傞丅
億僗僩偺敿宎偼偁傜偐偠傔暘偐偭偰偄傞偺偱丄偙傟偐傜億僗僩偺拞怱嵗昗傪寁嶼偟偰媮傔傞偙偲偑偱偒傞丅
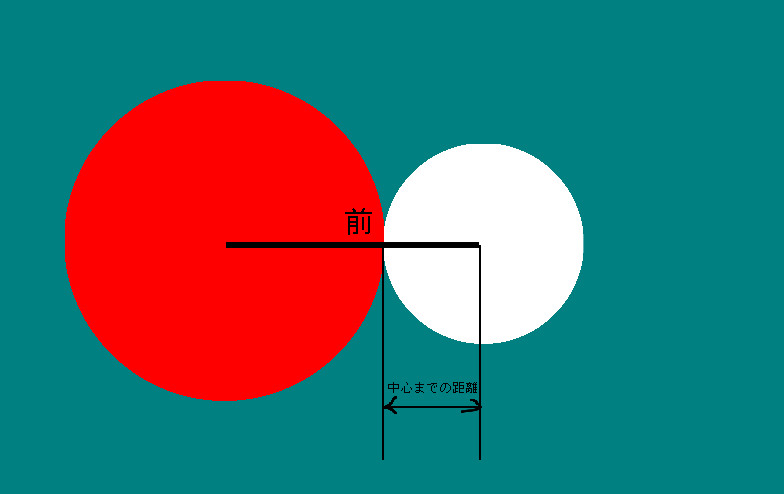
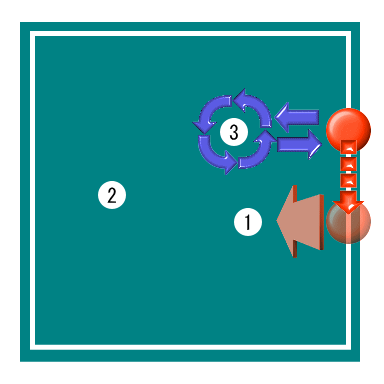
丒拞怱嵗昗偑媮傑偭偨傜丄僶僢僋偟偰億僗僩偐傜堦掕嫍棧棧傟偰丄嵍偵90亱夞揮偡傞丅
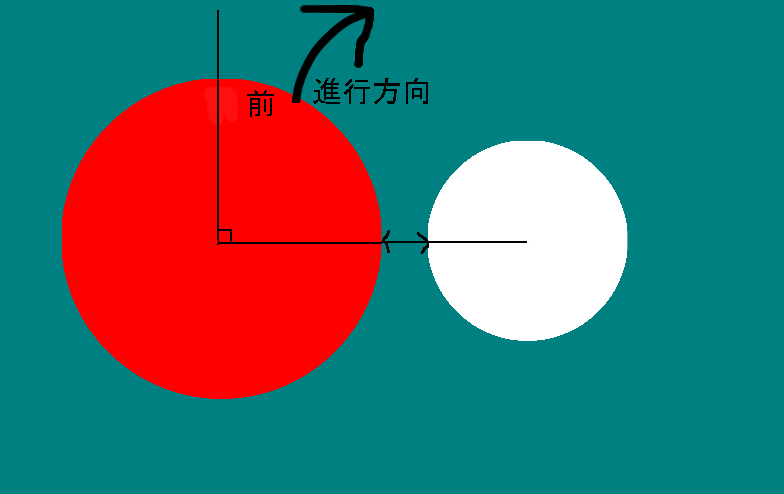
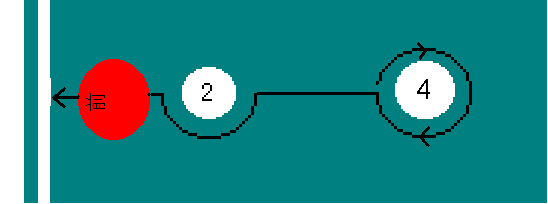
丒挻壒攇僙儞僒傪梡偄偰億僗僩偲偺嫍棧傪堦掕偵曐偪側偑傜丄億僗僩偺廃傝傪敿廃偡傞丅
(偙偺偲偒丄屻偵彂偄偰偁傞亙摿暿側摦偒侾亜傪偡傞丅)
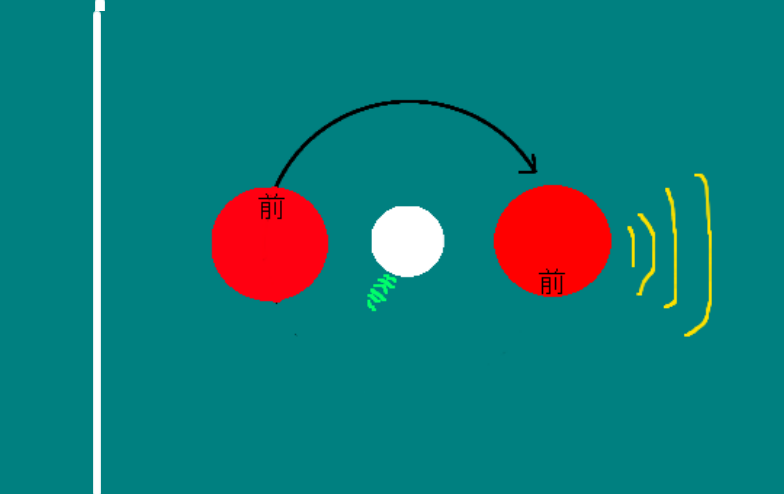
丒巆傝偺敿廃傪夞傝丄堦廃偡傞娫偵僗僀僢僠傪尒偮偗丄愒奜慄僙儞僒偱No傪妋擣丄婰榐偡傞丅
丒堦廃偟偨傜丄敀慄偵栠傞丅
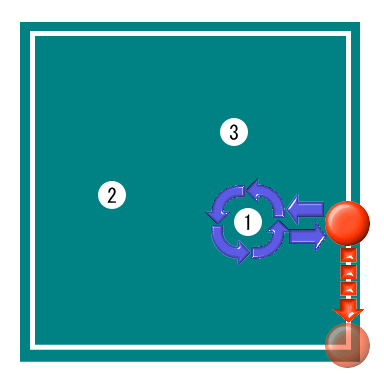
丒敀慄偵懳偟偰億僗僩偑恾偺傛偆偵愝抲偝傟偨応崌偵偼丄塃懁偺億僗僩偼敀慄偺埵抲偐傜偼敪尒偡傞偙偲偑偱偒側偄丅
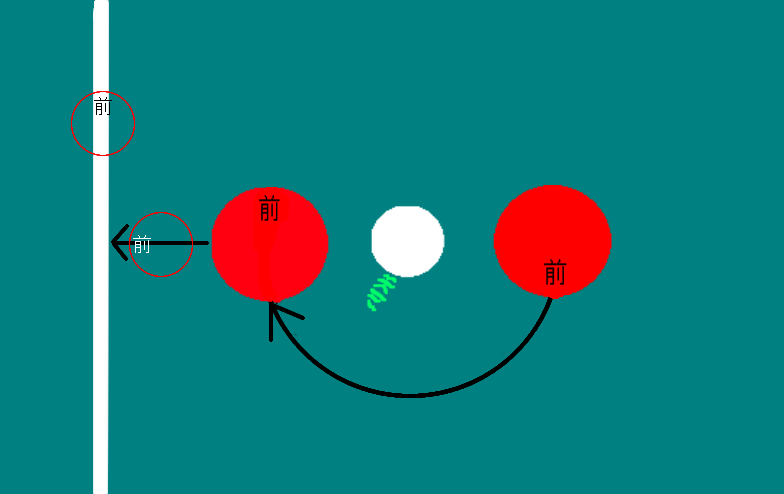
丒偦偙偱億僗僩偺廃傝傪夞傞偲偒偵丄敿廃偟偨帪揰偱挻壒攇僙儞僒偱億僗僩偺専嶕傪峴偄丄億僗僩傪敪尒偡傞丅
丒億僗僩傪堦廃偟廔傢偭偰偐傜丄塃懁偺億僗僩偵岦偐偆丅

丒塃懁偺億僗僩偺嵗昗偲No傪妋擣偟丄敀慄傊栠傞丅
億僗僩偵愙嬤偟偨偲偒偵丄恑峴曽岦慜曽偵僗僀僢僠偑偁偭偨応崌偼丄No傪妋擣偡傞慜偼僗僀僢僠傪墴偝側偄傛偆偵偟偨偄丅
丒億僗僩偵愙嬤偡傞偲偒偵偼丄忢偵慜曽偵愒奜慄偑側偄偐偳偆偐傪妋擣偡傞丅
丒愒奜慄傪妋擣偱偒偨応崌偵偼丄慜曽偺挻壒攇僙儞僒傪梡偄偰億僗僩偲偺嫍棧傪偍偄偰偲傑傝丄偦偺応偱嵍偵90亱夞揮偡傞丅

丒No傪妋擣偟偰偐傜丄億僗僩傪堦廃偟丄師偺摦嶌傊堏傞丅